 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEGP3D: Edge-guided Geometric Preserving 3D Point Cloud Super-resolution for RGB-D camera
Dec 16, 2024



Point clouds or depth images captured by current RGB-D cameras often suffer from low resolution, rendering them insufficient for applications such as 3D reconstruction and robots. Existing point cloud super-resolution (PCSR) methods are either constrained by geometric artifacts or lack attention to edge details. To address these issues, we propose an edge-guided geometric-preserving 3D point cloud super-resolution (EGP3D) method tailored for RGB-D cameras. Our approach innovatively optimizes the point cloud with an edge constraint on a projected 2D space, thereby ensuring high-quality edge preservation in the 3D PCSR task. To tackle geometric optimization challenges in super-resolution point clouds, particularly preserving edge shapes and smoothness, we introduce a multi-faceted loss function that simultaneously optimizes the Chamfer distance, Hausdorff distance, and gradient smoothness. Existing datasets used for point cloud upsampling are predominantly synthetic and inadequately represent real-world scenarios, neglecting noise and stray light effects. To address the scarcity of realistic RGB-D data for PCSR tasks, we built a dataset that captures real-world noise and stray-light effects, offering a more accurate representation of authentic environments. Validated through simulations and real-world experiments, the proposed method exhibited superior performance in preserving edge clarity and geometric details.
Multiscale Sliced Wasserstein Distances as Perceptual Color Difference Measures
Jul 14, 2024

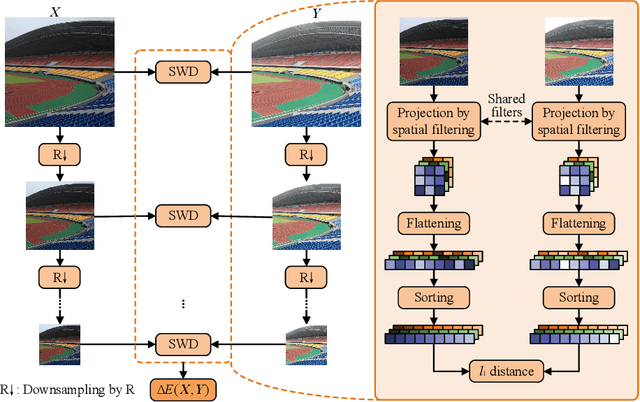

Contemporary color difference (CD) measures for photographic images typically operate by comparing co-located pixels, patches in a ``perceptually uniform'' color space, or features in a learned latent space. Consequently, these measures inadequately capture the human color perception of misaligned image pairs, which are prevalent in digital photography (e.g., the same scene captured by different smartphones). In this paper, we describe a perceptual CD measure based on the multiscale sliced Wasserstein distance, which facilitates efficient comparisons between non-local patches of similar color and structure. This aligns with the modern understanding of color perception, where color and structure are inextricably interdependent as a unitary process of perceptual organization. Meanwhile, our method is easy to implement and training-free. Experimental results indicate that our CD measure performs favorably in assessing CDs in photographic images, and consistently surpasses competing models in the presence of image misalignment. Additionally, we empirically verify that our measure functions as a metric in the mathematical sense, and show its promise as a loss function for image and video color transfer tasks. The code is available at https://github.com/real-hjq/MS-SWD.
Diagrammatic Instructions to Specify Spatial Objectives and Constraints with Applications to Mobile Base Placement
Mar 25, 2024



This paper introduces Spatial Diagrammatic Instructions (SDIs), an approach for human operators to specify objectives and constraints that are related to spatial regions in the working environment. Human operators are enabled to sketch out regions directly on camera images that correspond to the objectives and constraints. These sketches are projected to 3D spatial coordinates, and continuous Spatial Instruction Maps (SIMs) are learned upon them. These maps can then be integrated into optimization problems for tasks of robots. In particular, we demonstrate how Spatial Diagrammatic Instructions can be applied to solve the Base Placement Problem of mobile manipulators, which concerns the best place to put the manipulator to facilitate a certain task. Human operators can specify, via sketch, spatial regions of interest for a manipulation task and permissible regions for the mobile manipulator to be at. Then, an optimization problem that maximizes the manipulator's reachability, or coverage, over the designated regions of interest while remaining in the permissible regions is solved. We provide extensive empirical evaluations, and show that our formulation of Spatial Instruction Maps provides accurate representations of user-specified diagrammatic instructions. Furthermore, we demonstrate that our diagrammatic approach to the Mobile Base Placement Problem enables higher quality solutions and faster run-time.
Learning a Deep Color Difference Metric for Photographic Images
Mar 27, 2023



Most well-established and widely used color difference (CD) metrics are handcrafted and subject-calibrated against uniformly colored patches, which do not generalize well to photographic images characterized by natural scene complexities. Constructing CD formulae for photographic images is still an active research topic in imaging/illumination, vision science, and color science communities. In this paper, we aim to learn a deep CD metric for photographic images with four desirable properties. First, it well aligns with the observations in vision science that color and form are linked inextricably in visual cortical processing. Second, it is a proper metric in the mathematical sense. Third, it computes accurate CDs between photographic images, differing mainly in color appearances. Fourth, it is robust to mild geometric distortions (e.g., translation or due to parallax), which are often present in photographic images of the same scene captured by different digital cameras. We show that all these properties can be satisfied at once by learning a multi-scale autoregressive normalizing flow for feature transform, followed by the Euclidean distance which is linearly proportional to the human perceptual CD. Quantitative and qualitative experiments on the large-scale SPCD dataset demonstrate the promise of the learned CD metric.
HerosNet: Hyperspectral Explicable Reconstruction and Optimal Sampling Deep Network for Snapshot Compressive Imaging
Dec 12, 2021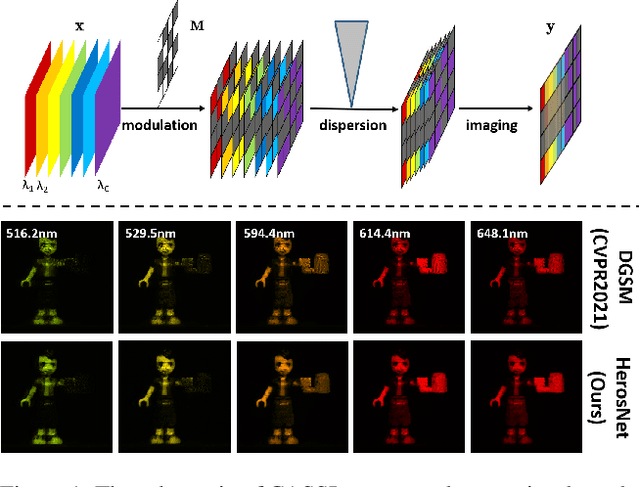

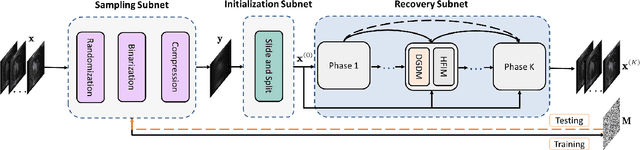

Hyperspectral imaging is an essential imaging modality for a wide range of applications, especially in remote sensing, agriculture, and medicine. Inspired by existing hyperspectral cameras that are either slow, expensive, or bulky, reconstructing hyperspectral images (HSIs) from a low-budget snapshot measurement has drawn wide attention. By mapping a truncated numerical optimization algorithm into a network with a fixed number of phases, recent deep unfolding networks (DUNs) for spectral snapshot compressive sensing (SCI) have achieved remarkable success. However, DUNs are far from reaching the scope of industrial applications limited by the lack of cross-phase feature interaction and adaptive parameter adjustment. In this paper, we propose a novel Hyperspectral Explicable Reconstruction and Optimal Sampling deep Network for SCI, dubbed HerosNet, which includes several phases under the ISTA-unfolding framework. Each phase can flexibly simulate the sensing matrix and contextually adjust the step size in the gradient descent step, and hierarchically fuse and interact the hidden states of previous phases to effectively recover current HSI frames in the proximal mapping step. Simultaneously, a hardware-friendly optimal binary mask is learned end-to-end to further improve the reconstruction performance. Finally, our HerosNet is validated to outperform the state-of-the-art methods on both simulation and real datasets by large margins.