 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDISCOVERSE: Efficient Robot Simulation in Complex High-Fidelity Environments
Jul 29, 2025We present the first unified, modular, open-source 3DGS-based simulation framework for Real2Sim2Real robot learning. It features a holistic Real2Sim pipeline that synthesizes hyper-realistic geometry and appearance of complex real-world scenarios, paving the way for analyzing and bridging the Sim2Real gap. Powered by Gaussian Splatting and MuJoCo, Discoverse enables massively parallel simulation of multiple sensor modalities and accurate physics, with inclusive supports for existing 3D assets, robot models, and ROS plugins, empowering large-scale robot learning and complex robotic benchmarks. Through extensive experiments on imitation learning, Discoverse demonstrates state-of-the-art zero-shot Sim2Real transfer performance compared to existing simulators. For code and demos: https://air-discoverse.github.io/.
Hint-AD: Holistically Aligned Interpretability in End-to-End Autonomous Driving
Sep 10, 2024
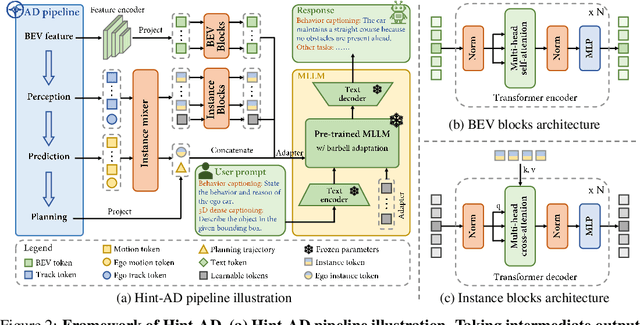

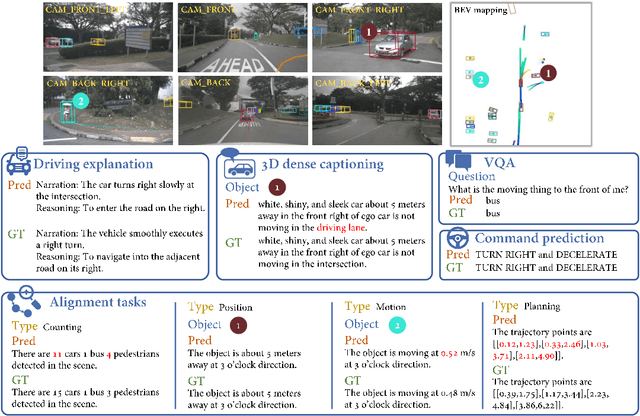
End-to-end architectures in autonomous driving (AD) face a significant challenge in interpretability, impeding human-AI trust. Human-friendly natural language has been explored for tasks such as driving explanation and 3D captioning. However, previous works primarily focused on the paradigm of declarative interpretability, where the natural language interpretations are not grounded in the intermediate outputs of AD systems, making the interpretations only declarative. In contrast, aligned interpretability establishes a connection between language and the intermediate outputs of AD systems. Here we introduce Hint-AD, an integrated AD-language system that generates language aligned with the holistic perception-prediction-planning outputs of the AD model. By incorporating the intermediate outputs and a holistic token mixer sub-network for effective feature adaptation, Hint-AD achieves desirable accuracy, achieving state-of-the-art results in driving language tasks including driving explanation, 3D dense captioning, and command prediction. To facilitate further study on driving explanation task on nuScenes, we also introduce a human-labeled dataset, Nu-X. Codes, dataset, and models will be publicly available.
PreAfford: Universal Affordance-Based Pre-Grasping for Diverse Objects and Environments
Apr 04, 2024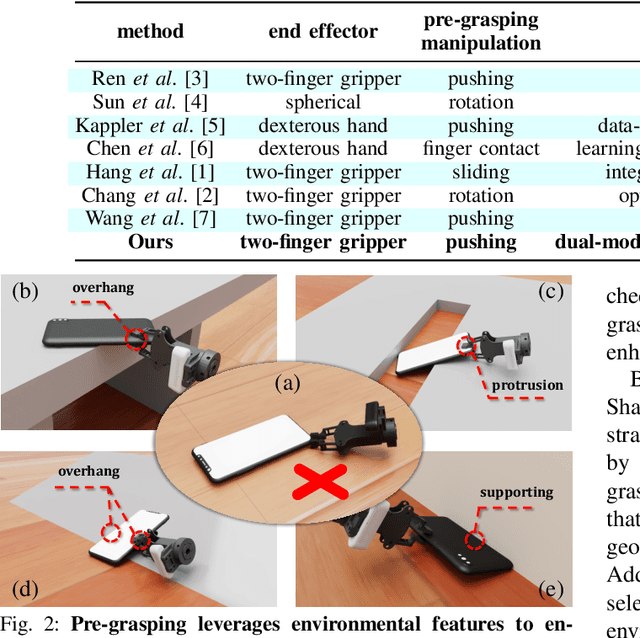

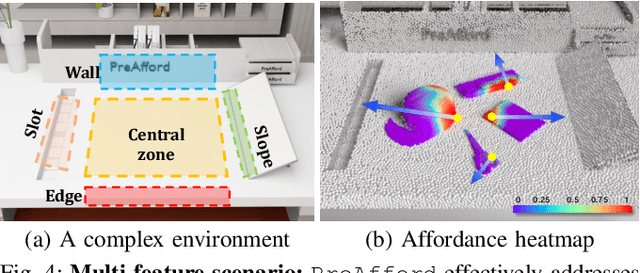
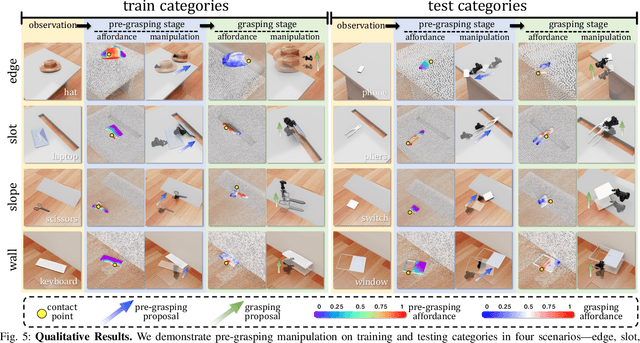
Robotic manipulation of ungraspable objects with two-finger grippers presents significant challenges due to the paucity of graspable features, while traditional pre-grasping techniques, which rely on repositioning objects and leveraging external aids like table edges, lack the adaptability across object categories and scenes. Addressing this, we introduce PreAfford, a novel pre-grasping planning framework that utilizes a point-level affordance representation and a relay training approach to enhance adaptability across a broad range of environments and object types, including those previously unseen. Demonstrated on the ShapeNet-v2 dataset, PreAfford significantly improves grasping success rates by 69% and validates its practicality through real-world experiments. This work offers a robust and adaptable solution for manipulating ungraspable objects.