 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreAfford: Universal Affordance-Based Pre-Grasping for Diverse Objects and Environments
Paper and Code
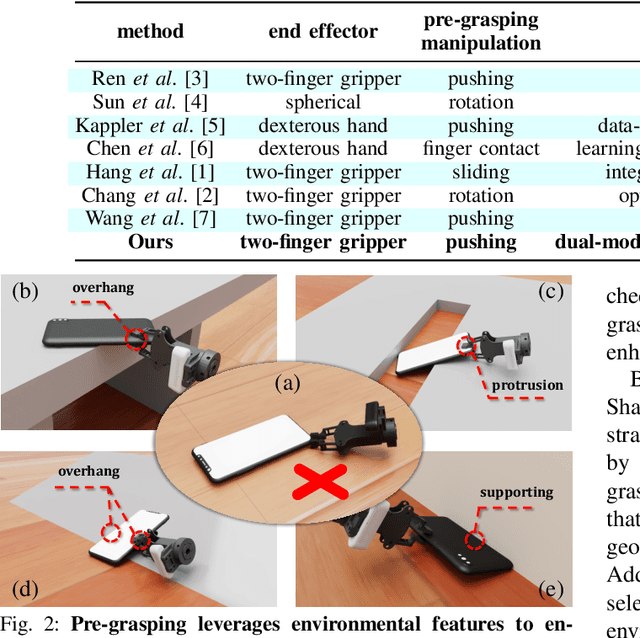

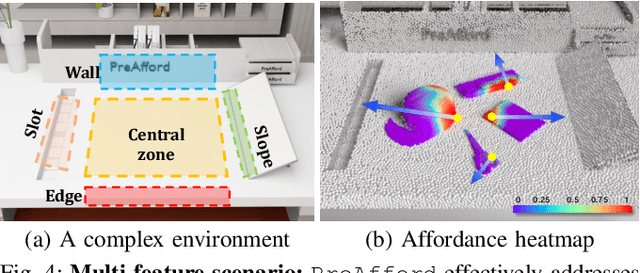
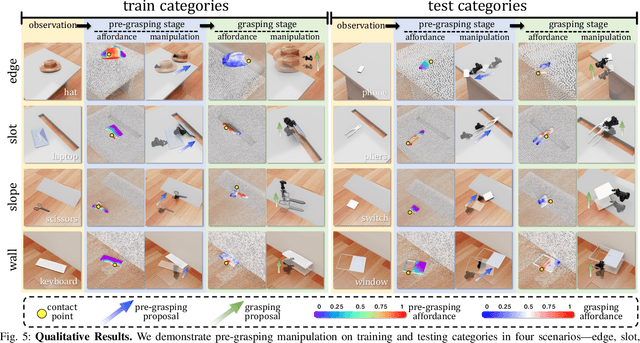
Robotic manipulation of ungraspable objects with two-finger grippers presents significant challenges due to the paucity of graspable features, while traditional pre-grasping techniques, which rely on repositioning objects and leveraging external aids like table edges, lack the adaptability across object categories and scenes. Addressing this, we introduce PreAfford, a novel pre-grasping planning framework that utilizes a point-level affordance representation and a relay training approach to enhance adaptability across a broad range of environments and object types, including those previously unseen. Demonstrated on the ShapeNet-v2 dataset, PreAfford significantly improves grasping success rates by 69% and validates its practicality through real-world experiments. This work offers a robust and adaptable solution for manipulating ungraspable objects.