 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMamba-CAD: State Space Model For 3D Computer-Aided Design Generative Modeling
Feb 28, 2026Computer-Aided Design (CAD) generative modeling has a strong and long-term application in the industry. Recently, the parametric CAD sequence as the design logic of an object has been widely mined by sequence models. However, the industrial CAD models, especially in component objects, are fine-grained and complex, requiring a longer parametric CAD sequence to define. To address the problem, we introduce Mamba-CAD, a self-supervised generative modeling for complex CAD models in the industry, which can model on a longer parametric CAD sequence. Specifically, we first design an encoder-decoder framework based on a Mamba architecture and pair it with a CAD reconstruction task for pre-training to model the latent representation of CAD models; and then we utilize the learned representation to guide a generative adversarial network to produce the fake representation of CAD models, which would be finally recovered into parametric CAD sequences via the decoder of MambaCAD. To train Mamba-CAD, we further create a new dataset consisting of 77,078 CAD models with longer parametric CAD sequences. Comprehensive experiments are conducted to demonstrate the effectiveness of our model under various evaluation metrics, especially in the generation length of valid parametric CAD sequences. The code and dataset can be achieved from https://github.com/Sunny-Hack/Code-for-Mamba-CAD-AAAI-2025-.
H-CNN-ViT: A Hierarchical Gated Attention Multi-Branch Model for Bladder Cancer Recurrence Prediction
Nov 19, 2025Bladder cancer is one of the most prevalent malignancies worldwide, with a recurrence rate of up to 78%, necessitating accurate post-operative monitoring for effective patient management. Multi-sequence contrast-enhanced MRI is commonly used for recurrence detection; however, interpreting these scans remains challenging, even for experienced radiologists, due to post-surgical alterations such as scarring, swelling, and tissue remodeling. AI-assisted diagnostic tools have shown promise in improving bladder cancer recurrence prediction, yet progress in this field is hindered by the lack of dedicated multi-sequence MRI datasets for recurrence assessment study. In this work, we first introduce a curated multi-sequence, multi-modal MRI dataset specifically designed for bladder cancer recurrence prediction, establishing a valuable benchmark for future research. We then propose H-CNN-ViT, a new Hierarchical Gated Attention Multi-Branch model that enables selective weighting of features from the global (ViT) and local (CNN) paths based on contextual demands, achieving a balanced and targeted feature fusion. Our multi-branch architecture processes each modality independently, ensuring that the unique properties of each imaging channel are optimally captured and integrated. Evaluated on our dataset, H-CNN-ViT achieves an AUC of 78.6%, surpassing state-of-the-art models. Our model is publicly available at https://github.com/XLIAaron/H-CNN-ViT.
AT-CXR: Uncertainty-Aware Agentic Triage for Chest X-rays
Aug 26, 2025Agentic AI is advancing rapidly, yet truly autonomous medical-imaging triage, where a system decides when to stop, escalate, or defer under real constraints, remains relatively underexplored. To address this gap, we introduce AT-CXR, an uncertainty-aware agent for chest X-rays. The system estimates per-case confidence and distributional fit, then follows a stepwise policy to issue an automated decision or abstain with a suggested label for human intervention. We evaluate two router designs that share the same inputs and actions: a deterministic rule-based router and an LLM-decided router. Across five-fold evaluation on a balanced subset of NIH ChestX-ray14 dataset, both variants outperform strong zero-shot vision-language models and state-of-the-art supervised classifiers, achieving higher full-coverage accuracy and superior selective-prediction performance, evidenced by a lower area under the risk-coverage curve (AURC) and a lower error rate at high coverage, while operating with lower latency that meets practical clinical constraints. The two routers provide complementary operating points, enabling deployments to prioritize maximal throughput or maximal accuracy. Our code is available at https://github.com/XLIAaron/uncertainty-aware-cxr-agent.
Seek-CAD: A Self-refined Generative Modeling for 3D Parametric CAD Using Local Inference via DeepSeek
May 23, 2025The advent of Computer-Aided Design (CAD) generative modeling will significantly transform the design of industrial products. The recent research endeavor has extended into the realm of Large Language Models (LLMs). In contrast to fine-tuning methods, training-free approaches typically utilize the advanced closed-source LLMs, thereby offering enhanced flexibility and efficiency in the development of AI agents for generating CAD parametric models. However, the substantial cost and limitations of local deployment of the top-tier closed-source LLMs pose challenges in practical applications. The Seek-CAD is the pioneer exploration of locally deployed open-source inference LLM DeepSeek-R1 for CAD parametric model generation with a training-free methodology. This study is the first investigation to incorporate both visual and Chain-of-Thought (CoT) feedback within the self-refinement mechanism for generating CAD models. Specifically, the initial generated parametric CAD model is rendered into a sequence of step-wise perspective images, which are subsequently processed by a Vision Language Model (VLM) alongside the corresponding CoTs derived from DeepSeek-R1 to assess the CAD model generation. Then, the feedback is utilized by DeepSeek-R1 to refine the initial generated model for the next round of generation. Moreover, we present an innovative 3D CAD model dataset structured around the SSR (Sketch, Sketch-based feature, and Refinements) triple design paradigm. This dataset encompasses a wide range of CAD commands, thereby aligning effectively with industrial application requirements and proving suitable for the generation of LLMs. Extensive experiments validate the effectiveness of Seek-CAD under various metrics.
Unsupervised Out-of-Distribution Detection in Medical Imaging Using Multi-Exit Class Activation Maps and Feature Masking
May 13, 2025Out-of-distribution (OOD) detection is essential for ensuring the reliability of deep learning models in medical imaging applications. This work is motivated by the observation that class activation maps (CAMs) for in-distribution (ID) data typically emphasize regions that are highly relevant to the model's predictions, whereas OOD data often lacks such focused activations. By masking input images with inverted CAMs, the feature representations of ID data undergo more substantial changes compared to those of OOD data, offering a robust criterion for differentiation. In this paper, we introduce a novel unsupervised OOD detection framework, Multi-Exit Class Activation Map (MECAM), which leverages multi-exit CAMs and feature masking. By utilizing mult-exit networks that combine CAMs from varying resolutions and depths, our method captures both global and local feature representations, thereby enhancing the robustness of OOD detection. We evaluate MECAM on multiple ID datasets, including ISIC19 and PathMNIST, and test its performance against three medical OOD datasets, RSNA Pneumonia, COVID-19, and HeadCT, and one natural image OOD dataset, iSUN. Comprehensive comparisons with state-of-the-art OOD detection methods validate the effectiveness of our approach. Our findings emphasize the potential of multi-exit networks and feature masking for advancing unsupervised OOD detection in medical imaging, paving the way for more reliable and interpretable models in clinical practice.
CAD-Llama: Leveraging Large Language Models for Computer-Aided Design Parametric 3D Model Generation
May 07, 2025Recently, Large Language Models (LLMs) have achieved significant success, prompting increased interest in expanding their generative capabilities beyond general text into domain-specific areas. This study investigates the generation of parametric sequences for computer-aided design (CAD) models using LLMs. This endeavor represents an initial step towards creating parametric 3D shapes with LLMs, as CAD model parameters directly correlate with shapes in three-dimensional space. Despite the formidable generative capacities of LLMs, this task remains challenging, as these models neither encounter parametric sequences during their pretraining phase nor possess direct awareness of 3D structures. To address this, we present CAD-Llama, a framework designed to enhance pretrained LLMs for generating parametric 3D CAD models. Specifically, we develop a hierarchical annotation pipeline and a code-like format to translate parametric 3D CAD command sequences into Structured Parametric CAD Code (SPCC), incorporating hierarchical semantic descriptions. Furthermore, we propose an adaptive pretraining approach utilizing SPCC, followed by an instruction tuning process aligned with CAD-specific guidelines. This methodology aims to equip LLMs with the spatial knowledge inherent in parametric sequences. Experimental results demonstrate that our framework significantly outperforms prior autoregressive methods and existing LLM baselines.
MPBD-LSTM: A Predictive Model for Colorectal Liver Metastases Using Time Series Multi-phase Contrast-Enhanced CT Scans
Dec 02, 2024Colorectal cancer is a prevalent form of cancer, and many patients develop colorectal cancer liver metastasis (CRLM) as a result. Early detection of CRLM is critical for improving survival rates. Radiologists usually rely on a series of multi-phase contrast-enhanced computed tomography (CECT) scans done during follow-up visits to perform early detection of the potential CRLM. These scans form unique five-dimensional data (time, phase, and axial, sagittal, and coronal planes in 3D CT). Most of the existing deep learning models can readily handle four-dimensional data (e.g., time-series 3D CT images) and it is not clear how well they can be extended to handle the additional dimension of phase. In this paper, we build a dataset of time-series CECT scans to aid in the early diagnosis of CRLM, and build upon state-of-the-art deep learning techniques to evaluate how to best predict CRLM. Our experimental results show that a multi-plane architecture based on 3D bi-directional LSTM, which we call MPBD-LSTM, works best, achieving an area under curve (AUC) of 0.79. On the other hand, analysis of the results shows that there is still great room for further improvement.
Enhancing 3D Transformer Segmentation Model for Medical Image with Token-level Representation Learning
Aug 12, 2024In the field of medical images, although various works find Swin Transformer has promising effectiveness on pixelwise dense prediction, whether pre-training these models without using extra dataset can further boost the performance for the downstream semantic segmentation remains unexplored.Applications of previous representation learning methods are hindered by the limited number of 3D volumes and high computational cost. In addition, most of pretext tasks designed specifically for Transformer are not applicable to hierarchical structure of Swin Transformer. Thus, this work proposes a token-level representation learning loss that maximizes agreement between token embeddings from different augmented views individually instead of volume-level global features. Moreover, we identify a potential representation collapse exclusively caused by this new loss. To prevent collapse, we invent a simple "rotate-and-restore" mechanism, which rotates and flips one augmented view of input volume, and later restores the order of tokens in the feature maps. We also modify the contrastive loss to address the discrimination between tokens at the same position but from different volumes. We test our pre-training scheme on two public medical segmentation datasets, and the results on the downstream segmentation task show more improvement of our methods than other state-of-the-art pre-trainig methods.
Arm-Constrained Curriculum Learning for Loco-Manipulation of the Wheel-Legged Robot
Mar 28, 2024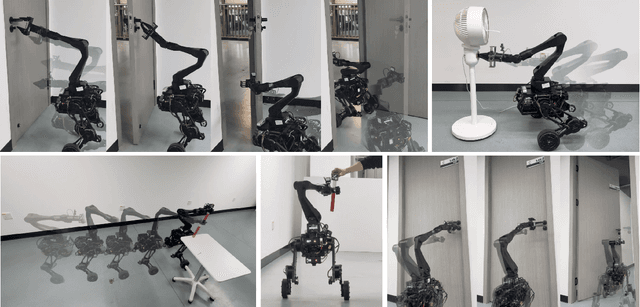
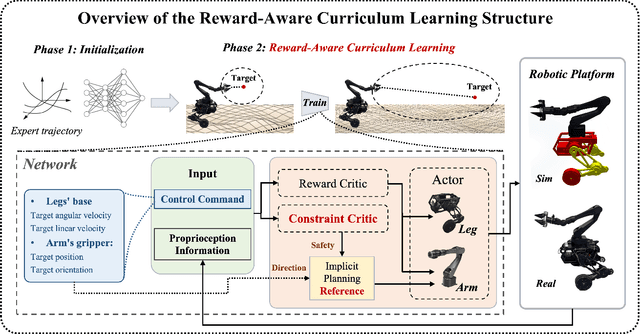
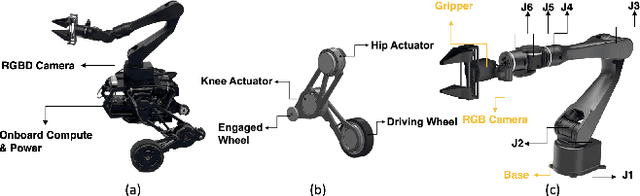
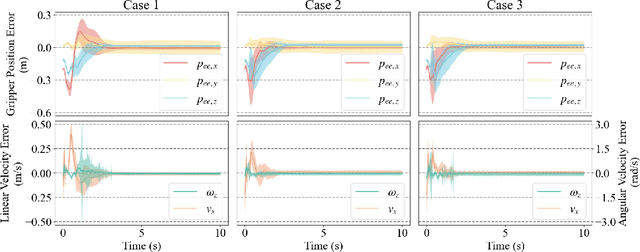
Incorporating a robotic manipulator into a wheel-legged robot enhances its agility and expands its potential for practical applications. However, the presence of potential instability and uncertainties presents additional challenges for control objectives. In this paper, we introduce an arm-constrained curriculum learning architecture to tackle the issues introduced by adding the manipulator. Firstly, we develop an arm-constrained reinforcement learning algorithm to ensure safety and stability in control performance. Additionally, to address discrepancies in reward settings between the arm and the base, we propose a reward-aware curriculum learning method. The policy is first trained in Isaac gym and transferred to the physical robot to do dynamic grasping tasks, including the door-opening task, fan-twitching task and the relay-baton-picking and following task. The results demonstrate that our proposed approach effectively controls the arm-equipped wheel-legged robot to master dynamic grasping skills, allowing it to chase and catch a moving object while in motion. Please refer to our website (https://acodedog.github.io/wheel-legged-loco-manipulation) for the code and supplemental videos.
Gem5Pred: Predictive Approaches For Gem5 Simulation Time
Oct 10, 2023Gem5, an open-source, flexible, and cost-effective simulator, is widely recognized and utilized in both academic and industry fields for hardware simulation. However, the typically time-consuming nature of simulating programs on Gem5 underscores the need for a predictive model that can estimate simulation time. As of now, no such dataset or model exists. In response to this gap, this paper makes a novel contribution by introducing a unique dataset specifically created for this purpose. We also conducted analysis of the effects of different instruction types on the simulation time in Gem5. After this, we employ three distinct models leveraging CodeBERT to execute the prediction task based on the developed dataset. Our superior regression model achieves a Mean Absolute Error (MAE) of 0.546, while our top-performing classification model records an Accuracy of 0.696. Our models establish a foundation for future investigations on this topic, serving as benchmarks against which subsequent models can be compared. We hope that our contribution can simulate further research in this field. The dataset we used is available at https://github.com/XueyangLiOSU/Gem5Pred.