 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCycle Inverse-Consistent TransMorph: A Balanced Deep Learning Framework for Brain MRI Registration
Mar 23, 2026Deformable image registration plays a fundamental role in medical image analysis by enabling spatial alignment of anatomical structures across subjects. While recent deep learning-based approaches have significantly improved computational efficiency, many existing methods remain limited in capturing long-range anatomical correspondence and maintaining deformation consistency. In this work, we present a cycle inverse-consistent transformer-based framework for deformable brain MRI registration. The model integrates a Swin-UNet architecture with bidirectional consistency constraints, enabling the joint estimation of forward and backward deformation fields. This design allows the framework to capture both local anatomical details and global spatial relationships while improving deformation stability. We conduct a comprehensive evaluation of the proposed framework on a large multi-center dataset consisting of 2851 T1-weighted brain MRI scans aggregated from 13 public datasets. Experimental results demonstrate that the proposed framework achieves strong and balanced performance across multiple quantitative evaluation metrics while maintaining stable and physically plausible deformation fields. Detailed quantitative comparisons with baseline methods, including ANTs, ICNet, and VoxelMorph, are provided in the appendix. Experimental results demonstrate that CICTM achieves consistently strong performance across multiple evaluation criteria while maintaining stable and physically plausible deformation fields. These properties make the proposed framework suitable for large-scale neuroimaging datasets where both accuracy and deformation stability are critical.
Basis Transformers for Multi-Task Tabular Regression
Jun 07, 2025Dealing with tabular data is challenging due to partial information, noise, and heterogeneous structure. Existing techniques often struggle to simultaneously address key aspects of tabular data such as textual information, a variable number of columns, and unseen data without metadata besides column names. We propose a novel architecture, \textit{basis transformers}, specifically designed to tackle these challenges while respecting inherent invariances in tabular data, including hierarchical structure and the representation of numeric values. We evaluate our design on a multi-task tabular regression benchmark, achieving an improvement of 0.338 in the median $R^2$ score and the lowest standard deviation across 34 tasks from the OpenML-CTR23 benchmark. Furthermore, our model has five times fewer parameters than the best-performing baseline and surpasses pretrained large language model baselines -- even when initialized from randomized weights.
Unraveling the geometry of visual relational reasoning
Feb 24, 2025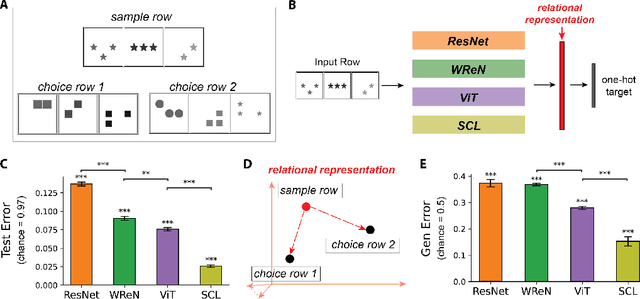

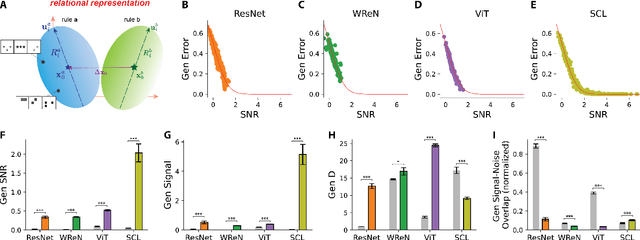
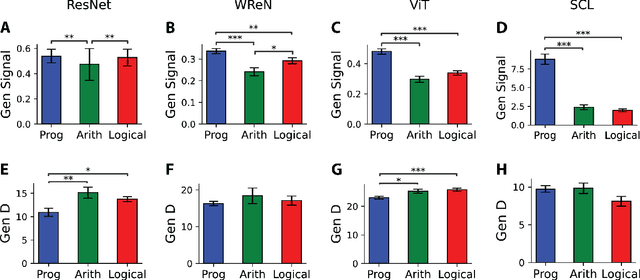
Humans and other animals readily generalize abstract relations, such as recognizing constant in shape or color, whereas neural networks struggle. To investigate how neural networks generalize abstract relations, we introduce SimplifiedRPM, a novel benchmark for systematic evaluation. In parallel, we conduct human experiments to benchmark relational difficulty, enabling direct model-human comparisons. Testing four architectures--ResNet-50, Vision Transformer, Wild Relation Network, and Scattering Compositional Learner (SCL)--we find that SCL best aligns with human behavior and generalizes best. Building on a geometric theory of neural representations, we show representational geometries that predict generalization. Layer-wise analysis reveals distinct relational reasoning strategies across models and suggests a trade-off where unseen rule representations compress into training-shaped subspaces. Guided by our geometric perspective, we propose and evaluate SNRloss, a novel objective balancing representation geometry. Our findings offer geometric insights into how neural networks generalize abstract relations, paving the way for more human-like visual reasoning in AI.
Diverse capability and scaling of diffusion and auto-regressive models when learning abstract rules
Nov 12, 2024



Humans excel at discovering regular structures from limited samples and applying inferred rules to novel settings. We investigate whether modern generative models can similarly learn underlying rules from finite samples and perform reasoning through conditional sampling. Inspired by Raven's Progressive Matrices task, we designed GenRAVEN dataset, where each sample consists of three rows, and one of 40 relational rules governing the object position, number, or attributes applies to all rows. We trained generative models to learn the data distribution, where samples are encoded as integer arrays to focus on rule learning. We compared two generative model families: diffusion (EDM, DiT, SiT) and autoregressive models (GPT2, Mamba). We evaluated their ability to generate structurally consistent samples and perform panel completion via unconditional and conditional sampling. We found diffusion models excel at unconditional generation, producing more novel and consistent samples from scratch and memorizing less, but performing less well in panel completion, even with advanced conditional sampling methods. Conversely, autoregressive models excel at completing missing panels in a rule-consistent manner but generate less consistent samples unconditionally. We observe diverse data scaling behaviors: for both model families, rule learning emerges at a certain dataset size - around 1000s examples per rule. With more training data, diffusion models improve both their unconditional and conditional generation capabilities. However, for autoregressive models, while panel completion improves with more training data, unconditional generation consistency declines. Our findings highlight complementary capabilities and limitations of diffusion and autoregressive models in rule learning and reasoning tasks, suggesting avenues for further research into their mechanisms and potential for human-like reasoning.
Advancing Efficient Brain Tumor Multi-Class Classification -- New Insights from the Vision Mamba Model in Transfer Learning
Oct 29, 2024



Early and accurate diagnosis of brain tumors is crucial for improving patient survival rates. However, the detection and classification of brain tumors are challenging due to their diverse types and complex morphological characteristics. This study investigates the application of pre-trained models for brain tumor classification, with a particular focus on deploying the Mamba model. We fine-tuned several mainstream transfer learning models and applied them to the multi-class classification of brain tumors. By comparing these models to those trained from scratch, we demonstrated the significant advantages of transfer learning, especially in the medical imaging field, where annotated data is often limited. Notably, we introduced the Vision Mamba (Vim), a novel network architecture, and applied it for the first time in brain tumor classification, achieving exceptional classification accuracy. Experimental results indicate that the Vim model achieved 100% classification accuracy on an independent test set, emphasizing its potential for tumor classification tasks. These findings underscore the effectiveness of transfer learning in brain tumor classification and reveal that, compared to existing state-of-the-art models, the Vim model is lightweight, efficient, and highly accurate, offering a new perspective for clinical applications. Furthermore, the framework proposed in this study for brain tumor classification, based on transfer learning and the Vision Mamba model, is broadly applicable to other medical imaging classification problems.
Deep-Sea A*+: An Advanced Path Planning Method Integrating Enhanced A* and Dynamic Window Approach for Autonomous Underwater Vehicles
Oct 22, 2024



As terrestrial resources become increasingly depleted, the demand for deep-sea resource exploration has intensified. However, the extreme conditions in the deep-sea environment pose significant challenges for underwater operations, necessitating the development of robust detection robots. In this paper, we propose an advanced path planning methodology that integrates an improved A* algorithm with the Dynamic Window Approach (DWA). By optimizing the search direction of the traditional A* algorithm and introducing an enhanced evaluation function, our improved A* algorithm accelerates path searching and reduces computational load. Additionally, the path-smoothing process has been refined to improve continuity and smoothness, minimizing sharp turns. This method also integrates global path planning with local dynamic obstacle avoidance via DWA, improving the real-time response of underwater robots in dynamic environments. Simulation results demonstrate that our proposed method surpasses the traditional A* algorithm in terms of path smoothness, obstacle avoidance, and real-time performance. The robustness of this approach in complex environments with both static and dynamic obstacles highlights its potential in autonomous underwater vehicle (AUV) navigation and obstacle avoidance.