 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Fault Detection and Classification of Chemical Process Systems Leveraging Statistical Process Control and Riemannian Geometric Analysis
Apr 02, 2025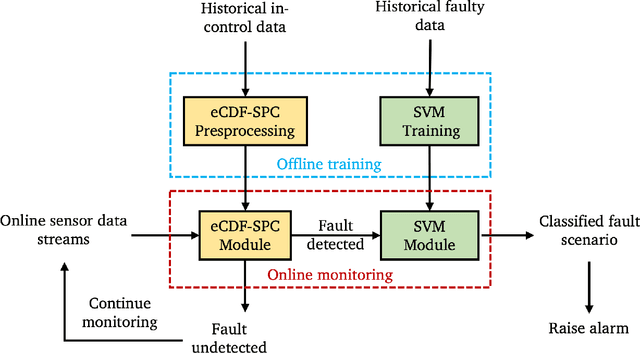



In this work, we study an integrated fault detection and classification framework called FARM for fast, accurate, and robust online chemical process monitoring. The FARM framework integrates the latest advancements in statistical process control (SPC) for monitoring nonparametric and heterogeneous data streams with novel data analysis approaches based on Riemannian geometry together in a hierarchical framework for online process monitoring. We conduct a systematic evaluation of the FARM monitoring framework using the Tennessee Eastman Process (TEP) dataset. Results show that FARM performs competitively against state-of-the-art process monitoring algorithms by achieving a good balance among fault detection rate (FDR), fault detection speed (FDS), and false alarm rate (FAR). Specifically, FARM achieved an average FDR of 96.97% while also outperforming benchmark methods in successfully detecting hard-to-detect faults that are previously known, including Faults 3, 9 and 15, with FDRs being 97.08%, 96.30% and 95.99%, respectively. In terms of FAR, our FARM framework allows practitioners to customize their choice of FAR, thereby offering great flexibility. Moreover, we report a significant improvement in average fault classification accuracy during online monitoring from 61% to 82% when leveraging Riemannian geometric analysis, and further to 84.5% when incorporating additional features from SPC. This illustrates the synergistic effect of integrating fault detection and classification in a holistic, hierarchical monitoring framework.
Deep-Sea A*+: An Advanced Path Planning Method Integrating Enhanced A* and Dynamic Window Approach for Autonomous Underwater Vehicles
Oct 22, 2024



As terrestrial resources become increasingly depleted, the demand for deep-sea resource exploration has intensified. However, the extreme conditions in the deep-sea environment pose significant challenges for underwater operations, necessitating the development of robust detection robots. In this paper, we propose an advanced path planning methodology that integrates an improved A* algorithm with the Dynamic Window Approach (DWA). By optimizing the search direction of the traditional A* algorithm and introducing an enhanced evaluation function, our improved A* algorithm accelerates path searching and reduces computational load. Additionally, the path-smoothing process has been refined to improve continuity and smoothness, minimizing sharp turns. This method also integrates global path planning with local dynamic obstacle avoidance via DWA, improving the real-time response of underwater robots in dynamic environments. Simulation results demonstrate that our proposed method surpasses the traditional A* algorithm in terms of path smoothness, obstacle avoidance, and real-time performance. The robustness of this approach in complex environments with both static and dynamic obstacles highlights its potential in autonomous underwater vehicle (AUV) navigation and obstacle avoidance.
MOLA: Enhancing Industrial Process Monitoring Using Multi-Block Orthogonal Long Short-Term Memory Autoencoder
Oct 10, 2024



In this work, we introduce MOLA: a Multi-block Orthogonal Long short-term memory Autoencoder paradigm, to conduct accurate, reliable fault detection of industrial processes. To achieve this, MOLA effectively extracts dynamic orthogonal features by introducing an orthogonality-based loss function to constrain the latent space output. This helps eliminate the redundancy in the features identified, thereby improving the overall monitoring performance. On top of this, a multi-block monitoring structure is proposed, which categorizes the process variables into multiple blocks by leveraging expert process knowledge about their associations with the overall process. Each block is associated with its specific Orthogonal Long short-term memory Autoencoder model, whose extracted dynamic orthogonal features are monitored by distance-based Hotelling's $T^2$ statistics and quantile-based cumulative sum (CUSUM) designed for multivariate data streams that are nonparametric, heterogeneous in nature. Compared to having a single model accounting for all process variables, such a multi-block structure improves the overall process monitoring performance significantly, especially for large-scale industrial processes. Finally, we propose an adaptive weight-based Bayesian fusion (W-BF) framework to aggregate all block-wise monitoring statistics into a global statistic that we monitor for faults, with the goal of improving fault detection speed by assigning weights to blocks based on the sequential order where alarms are raised. We demonstrate the efficiency and effectiveness of our MOLA framework by applying it to the Tennessee Eastman Process and comparing the performance with various benchmark methods.
The Effect of Different Optimization Strategies to Physics-Constrained Deep Learning for Soil Moisture Estimation
Mar 13, 2024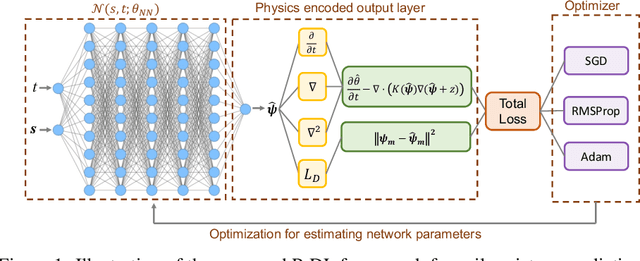
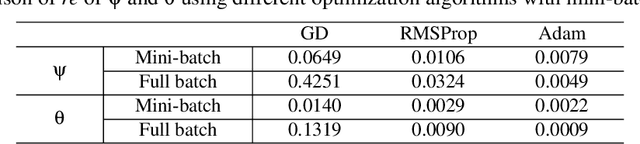

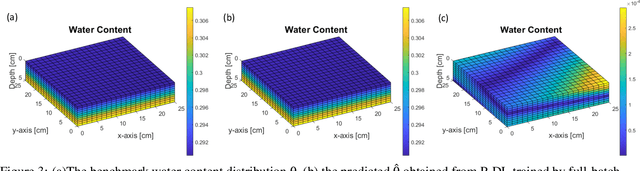
Soil moisture is a key hydrological parameter that has significant importance to human society and the environment. Accurate modeling and monitoring of soil moisture in crop fields, especially in the root zone (top 100 cm of soil), is essential for improving agricultural production and crop yield with the help of precision irrigation and farming tools. Realizing the full sensor data potential depends greatly on advanced analytical and predictive domain-aware models. In this work, we propose a physics-constrained deep learning (P-DL) framework to integrate physics-based principles on water transport and water sensing signals for effective reconstruction of the soil moisture dynamics. We adopt three different optimizers, namely Adam, RMSprop, and GD, to minimize the loss function of P-DL during the training process. In the illustrative case study, we demonstrate the empirical convergence of Adam optimizers outperforms the other optimization methods in both mini-batch and full-batch training.
Physics-constrained Active Learning for Soil Moisture Estimation and Optimal Sensor Placement
Mar 12, 2024Soil moisture is a crucial hydrological state variable that has significant importance to the global environment and agriculture. Precise monitoring of soil moisture in crop fields is critical to reducing agricultural drought and improving crop yield. In-situ soil moisture sensors, which are buried at pre-determined depths and distributed across the field, are promising solutions for monitoring soil moisture. However, high-density sensor deployment is neither economically feasible nor practical. Thus, to achieve a higher spatial resolution of soil moisture dynamics using a limited number of sensors, we integrate a physics-based agro-hydrological model based on Richards' equation in a physics-constrained deep learning framework to accurately predict soil moisture dynamics in the soil's root zone. This approach ensures that soil moisture estimates align well with sensor observations while obeying physical laws at the same time. Furthermore, to strategically identify the locations for sensor placement, we introduce a novel active learning framework that combines space-filling design and physics residual-based sampling to maximize data acquisition potential with limited sensors. Our numerical results demonstrate that integrating Physics-constrained Deep Learning (P-DL) with an active learning strategy within a unified framework--named the Physics-constrained Active Learning (P-DAL) framework--significantly improves the predictive accuracy and effectiveness of field-scale soil moisture monitoring using in-situ sensors.
A Data-facilitated Numerical Method for Richards Equation to Model Water Flow Dynamics in Soil
Oct 04, 2023Root-zone soil moisture monitoring is essential for precision agriculture, smart irrigation, and drought prevention. Modeling the spatiotemporal water flow dynamics in soil is typically achieved by solving a hydrological model, such as the Richards equation which is a highly nonlinear partial differential equation (PDE). In this paper, we present a novel data-facilitated numerical method for solving the mixed-form Richards equation. This numerical method, which we call the D-GRW (Data-facilitated global Random Walk) method, synergistically integrates adaptive linearization scheme, neural networks, and global random walk in a finite volume discretization framework to produce accurate numerical solutions of the Richards equation with guaranteed convergence under reasonable assumptions. Through three illustrative examples, we demonstrate and discuss the superior accuracy and mass conservation performance of our D-GRW method and compare it with benchmark numerical methods and commercial solver.