 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRight-Side-Out: Learning Zero-Shot Sim-to-Real Garment Reversal
Sep 19, 2025Turning garments right-side out is a challenging manipulation task: it is highly dynamic, entails rapid contact changes, and is subject to severe visual occlusion. We introduce Right-Side-Out, a zero-shot sim-to-real framework that effectively solves this challenge by exploiting task structures. We decompose the task into Drag/Fling to create and stabilize an access opening, followed by Insert&Pull to invert the garment. Each step uses a depth-inferred, keypoint-parameterized bimanual primitive that sharply reduces the action space while preserving robustness. Efficient data generation is enabled by our custom-built, high-fidelity, GPU-parallel Material Point Method (MPM) simulator that models thin-shell deformation and provides robust and efficient contact handling for batched rollouts. Built on the simulator, our fully automated pipeline scales data generation by randomizing garment geometry, material parameters, and viewpoints, producing depth, masks, and per-primitive keypoint labels without any human annotations. With a single depth camera, policies trained entirely in simulation deploy zero-shot on real hardware, achieving up to 81.3% success rate. By employing task decomposition and high fidelity simulation, our framework enables tackling highly dynamic, severely occluded tasks without laborious human demonstrations.
Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation
Apr 17, 2025Tactile sensing is crucial for achieving human-level robotic capabilities in manipulation tasks. VBTSs have emerged as a promising solution, offering high spatial resolution and cost-effectiveness by sensing contact through camera-captured deformation patterns of elastic gel pads. However, these sensors' complex physical characteristics and visual signal processing requirements present unique challenges for robotic applications. The lack of efficient and accurate simulation tools for VBTS has significantly limited the scale and scope of tactile robotics research. Here we present Taccel, a high-performance simulation platform that integrates IPC and ABD to model robots, tactile sensors, and objects with both accuracy and unprecedented speed, achieving an 18-fold acceleration over real-time across thousands of parallel environments. Unlike previous simulators that operate at sub-real-time speeds with limited parallelization, Taccel provides precise physics simulation and realistic tactile signals while supporting flexible robot-sensor configurations through user-friendly APIs. Through extensive validation in object recognition, robotic grasping, and articulated object manipulation, we demonstrate precise simulation and successful sim-to-real transfer. These capabilities position Taccel as a powerful tool for scaling up tactile robotics research and development. By enabling large-scale simulation and experimentation with tactile sensing, Taccel accelerates the development of more capable robotic systems, potentially transforming how robots interact with and understand their physical environment.
A Convex Formulation of Material Points and Rigid Bodies with GPU-Accelerated Async-Coupling for Interactive Simulation
Mar 06, 2025



We present a novel convex formulation that weakly couples the Material Point Method (MPM) with rigid body dynamics through frictional contact, optimized for efficient GPU parallelization. Our approach features an asynchronous time-splitting scheme to integrate MPM and rigid body dynamics under different time step sizes. We develop a globally convergent quasi-Newton solver tailored for massive parallelization, achieving up to 500x speedup over previous convex formulations without sacrificing stability. Our method enables interactive-rate simulations of robotic manipulation tasks with diverse deformable objects including granular materials and cloth, with strong convergence guarantees. We detail key implementation strategies to maximize performance and validate our approach through rigorous experiments, demonstrating superior speed, accuracy, and stability compared to state-of-the-art MPM simulators for robotics. We make our method available in the open-source robotics toolkit, Drake.
GRIP: A General Robotic Incremental Potential Contact Simulation Dataset for Unified Deformable-Rigid Coupled Grasping
Mar 06, 2025Grasping is fundamental to robotic manipulation, and recent advances in large-scale grasping datasets have provided essential training data and evaluation benchmarks, accelerating the development of learning-based methods for robust object grasping. However, most existing datasets exclude deformable bodies due to the lack of scalable, robust simulation pipelines, limiting the development of generalizable models for compliant grippers and soft manipulands. To address these challenges, we present GRIP, a General Robotic Incremental Potential contact simulation dataset for universal grasping. GRIP leverages an optimized Incremental Potential Contact (IPC)-based simulator for multi-environment data generation, achieving up to 48x speedup while ensuring efficient, intersection- and inversion-free simulations for compliant grippers and deformable objects. Our fully automated pipeline generates and evaluates diverse grasp interactions across 1,200 objects and 100,000 grasp poses, incorporating both soft and rigid grippers. The GRIP dataset enables applications such as neural grasp generation and stress field prediction.
Dress-1-to-3: Single Image to Simulation-Ready 3D Outfit with Diffusion Prior and Differentiable Physics
Feb 05, 2025



Recent advances in large models have significantly advanced image-to-3D reconstruction. However, the generated models are often fused into a single piece, limiting their applicability in downstream tasks. This paper focuses on 3D garment generation, a key area for applications like virtual try-on with dynamic garment animations, which require garments to be separable and simulation-ready. We introduce Dress-1-to-3, a novel pipeline that reconstructs physics-plausible, simulation-ready separated garments with sewing patterns and humans from an in-the-wild image. Starting with the image, our approach combines a pre-trained image-to-sewing pattern generation model for creating coarse sewing patterns with a pre-trained multi-view diffusion model to produce multi-view images. The sewing pattern is further refined using a differentiable garment simulator based on the generated multi-view images. Versatile experiments demonstrate that our optimization approach substantially enhances the geometric alignment of the reconstructed 3D garments and humans with the input image. Furthermore, by integrating a texture generation module and a human motion generation module, we produce customized physics-plausible and realistic dynamic garment demonstrations. Project page: https://dress-1-to-3.github.io/
Embedded IPC: Fast and Intersection-free Simulation in Reduced Subspace for Robot Manipulation
Sep 24, 2024



Physics-based simulation is essential for developing and evaluating robot manipulation policies, particularly in scenarios involving deformable objects and complex contact interactions. However, existing simulators often struggle to balance computational efficiency with numerical accuracy, especially when modeling deformable materials with frictional contact constraints. We introduce an efficient subspace representation for the Incremental Potential Contact (IPC) method, leveraging model reduction to decrease the number of degrees of freedom. Our approach decouples simulation complexity from the resolution of the input model by representing elasticity in a low-resolution subspace while maintaining collision constraints on an embedded high-resolution surface. Our barrier formulation ensures intersection-free trajectories and configurations regardless of material stiffness, time step size, or contact severity. We validate our simulator through quantitative experiments with a soft bubble gripper grasping and qualitative demonstrations of placing a plate on a dish rack. The results demonstrate our simulator's efficiency, physical accuracy, computational stability, and robust handling of frictional contact, making it well-suited for generating demonstration data and evaluating downstream robot training applications.
TacIPC: Intersection- and Inversion-free FEM-based Elastomer Simulation For Optical Tactile Sensors
Nov 10, 2023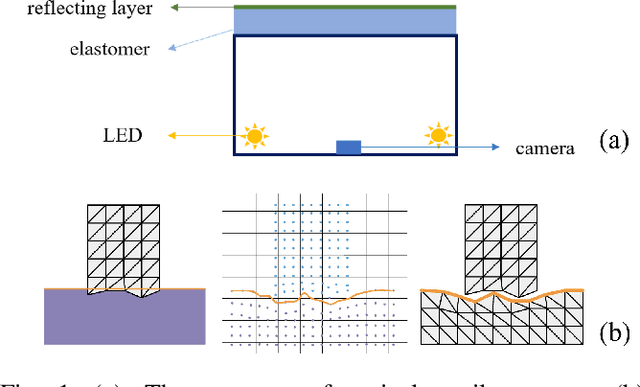
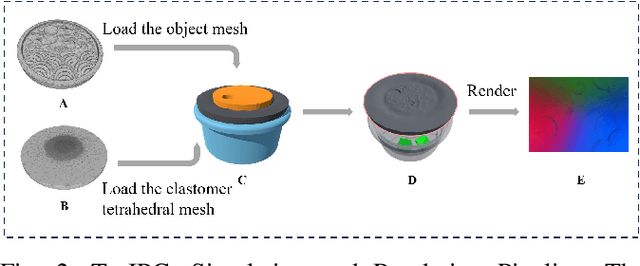
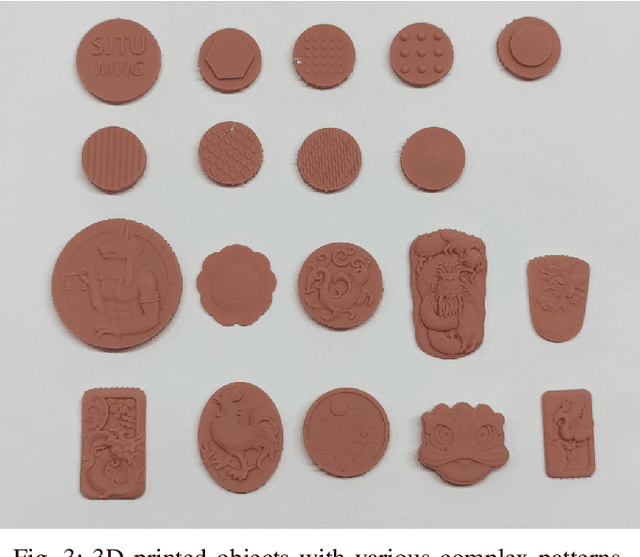
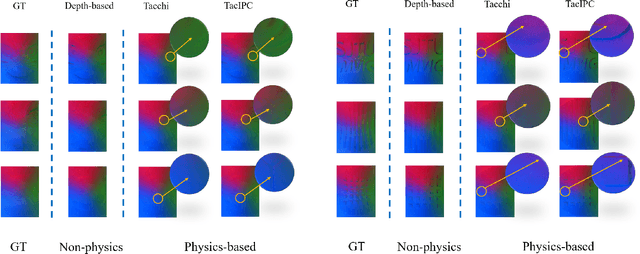
Tactile perception stands as a critical sensory modality for human interaction with the environment. Among various tactile sensor techniques, optical sensor-based approaches have gained traction, notably for producing high-resolution tactile images. This work explores gel elastomer deformation simulation through a physics-based approach. While previous works in this direction usually adopt the explicit material point method (MPM), which has certain limitations in force simulation and rendering, we adopt the finite element method (FEM) and address the challenges in penetration and mesh distortion with incremental potential contact (IPC) method. As a result, we present a simulator named TacIPC, which can ensure numerically stable simulations while accommodating direct rendering and friction modeling. To evaluate TacIPC, we conduct three tasks: pseudo-image quality assessment, deformed geometry estimation, and marker displacement prediction. These tasks show its superior efficacy in reducing the sim-to-real gap. Our method can also seamlessly integrate with existing simulators. More experiments and videos can be found in the supplementary materials and on the website: https://sites.google.com/view/tac-ipc.
Intersection-free Robot Manipulation with Soft-Rigid Coupled Incremental Potential Contact
Nov 10, 2023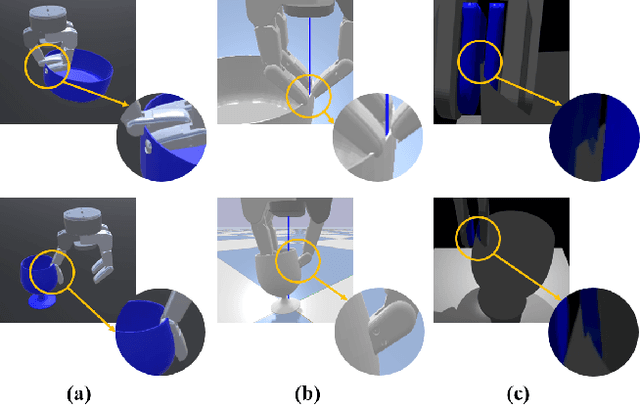
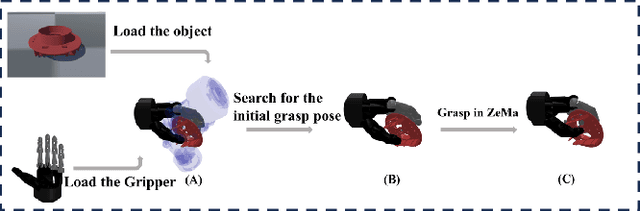
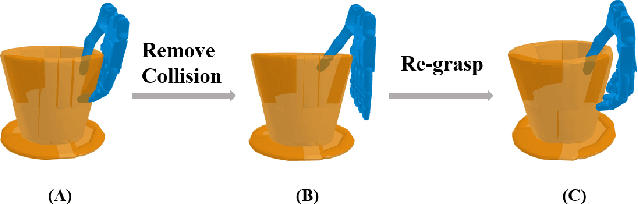
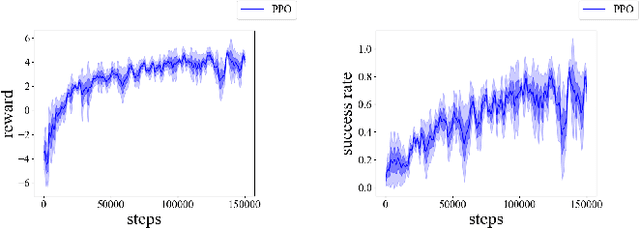
This paper presents a novel simulation platform, ZeMa, designed for robotic manipulation tasks concerning soft objects. Such simulation ideally requires three properties: two-way soft-rigid coupling, intersection-free guarantees, and frictional contact modeling, with acceptable runtime suitable for deep and reinforcement learning tasks. Current simulators often satisfy only a subset of these needs, primarily focusing on distinct rigid-rigid or soft-soft interactions. The proposed ZeMa prioritizes physical accuracy and integrates the incremental potential contact method, offering unified dynamics simulation for both soft and rigid objects. It efficiently manages soft-rigid contact, operating 75x faster than baseline tools with similar methodologies like IPC-GraspSim. To demonstrate its applicability, we employ it for parallel grasp generation, penetrated grasp repair, and reinforcement learning for grasping, successfully transferring the trained RL policy to real-world scenarios.
GarmentTracking: Category-Level Garment Pose Tracking
Mar 24, 2023Garments are important to humans. A visual system that can estimate and track the complete garment pose can be useful for many downstream tasks and real-world applications. In this work, we present a complete package to address the category-level garment pose tracking task: (1) A recording system VR-Garment, with which users can manipulate virtual garment models in simulation through a VR interface. (2) A large-scale dataset VR-Folding, with complex garment pose configurations in manipulation like flattening and folding. (3) An end-to-end online tracking framework GarmentTracking, which predicts complete garment pose both in canonical space and task space given a point cloud sequence. Extensive experiments demonstrate that the proposed GarmentTracking achieves great performance even when the garment has large non-rigid deformation. It outperforms the baseline approach on both speed and accuracy. We hope our proposed solution can serve as a platform for future research. Codes and datasets are available in https://garment-tracking.robotflow.ai.