 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFBI: Learning Dexterous In-hand Manipulation with Dynamic Visuotactile Shortcut Policy
Aug 20, 2025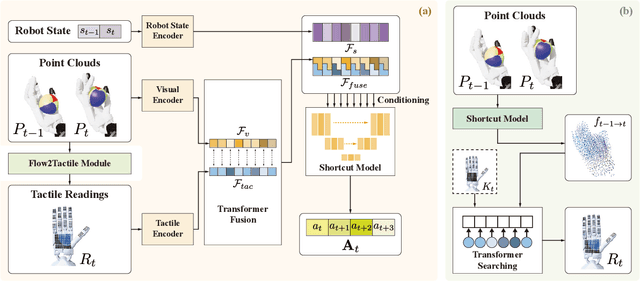

Dexterous in-hand manipulation is a long-standing challenge in robotics due to complex contact dynamics and partial observability. While humans synergize vision and touch for such tasks, robotic approaches often prioritize one modality, therefore limiting adaptability. This paper introduces Flow Before Imitation (FBI), a visuotactile imitation learning framework that dynamically fuses tactile interactions with visual observations through motion dynamics. Unlike prior static fusion methods, FBI establishes a causal link between tactile signals and object motion via a dynamics-aware latent model. FBI employs a transformer-based interaction module to fuse flow-derived tactile features with visual inputs, training a one-step diffusion policy for real-time execution. Extensive experiments demonstrate that the proposed method outperforms the baseline methods in both simulation and the real world on two customized in-hand manipulation tasks and three standard dexterous manipulation tasks. Code, models, and more results are available in the website https://sites.google.com/view/dex-fbi.
Intersection-free Robot Manipulation with Soft-Rigid Coupled Incremental Potential Contact
Nov 10, 2023
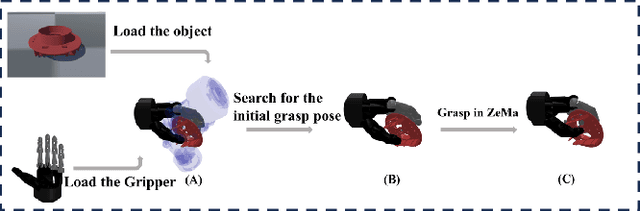
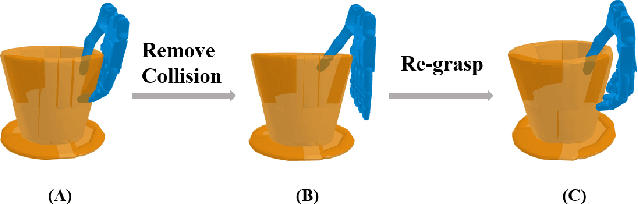
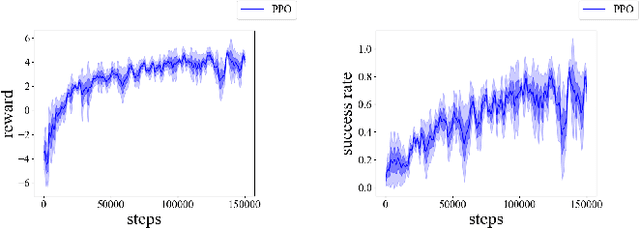
This paper presents a novel simulation platform, ZeMa, designed for robotic manipulation tasks concerning soft objects. Such simulation ideally requires three properties: two-way soft-rigid coupling, intersection-free guarantees, and frictional contact modeling, with acceptable runtime suitable for deep and reinforcement learning tasks. Current simulators often satisfy only a subset of these needs, primarily focusing on distinct rigid-rigid or soft-soft interactions. The proposed ZeMa prioritizes physical accuracy and integrates the incremental potential contact method, offering unified dynamics simulation for both soft and rigid objects. It efficiently manages soft-rigid contact, operating 75x faster than baseline tools with similar methodologies like IPC-GraspSim. To demonstrate its applicability, we employ it for parallel grasp generation, penetrated grasp repair, and reinforcement learning for grasping, successfully transferring the trained RL policy to real-world scenarios.
Differentiable Cloth Parameter Identification and State Estimation in Manipulation
Nov 09, 2023In the realm of robotic cloth manipulation, accurately estimating the cloth state during or post-execution is imperative. However, the inherent complexities in a cloth's dynamic behavior and its near-infinite degrees of freedom (DoF) pose significant challenges. Traditional methods have been restricted to using keypoints or boundaries as cues for cloth state, which do not holistically capture the cloth's structure, especially during intricate tasks like folding. Additionally, the critical influence of cloth physics has often been overlooked in past research. Addressing these concerns, we introduce DiffCP, a novel differentiable pipeline that leverages the Anisotropic Elasto-Plastic (A-EP) constitutive model, tailored for differentiable computation and robotic tasks. DiffCP adopts a ``real-to-sim-to-real'' methodology. By observing real-world cloth states through an RGB-D camera and projecting this data into a differentiable simulator, the system identifies physics parameters by minimizing the geometric variance between observed and target states. Extensive experiments demonstrate DiffCP's ability and stability to determine physics parameters under varying manipulations, grasping points, and speeds. Additionally, its applications extend to cloth material identification, manipulation trajectory generation, and more notably, enhancing cloth pose estimation accuracy. More experiments and videos can be found in the supplementary materials and on the website: https://sites.google.com/view/diffcp.
Precise Robotic Needle-Threading with Tactile Perception and Reinforcement Learning
Nov 04, 2023



This work presents a novel tactile perception-based method, named T-NT, for performing the needle-threading task, an application of deformable linear object (DLO) manipulation. This task is divided into two main stages: Tail-end Finding and Tail-end Insertion. In the first stage, the agent traces the contour of the thread twice using vision-based tactile sensors mounted on the gripper fingers. The two-run tracing is to locate the tail-end of the thread. In the second stage, it employs a tactile-guided reinforcement learning (RL) model to drive the robot to insert the thread into the target needle eyelet. The RL model is trained in a Unity-based simulated environment. The simulation environment supports tactile rendering which can produce realistic tactile images and thread modeling. During insertion, the position of the poke point and the center of the eyelet are obtained through a pre-trained segmentation model, Grounded-SAM, which predicts the masks for both the needle eye and thread imprints. These positions are then fed into the reinforcement learning model, aiding in a smoother transition to real-world applications. Extensive experiments on real robots are conducted to demonstrate the efficacy of our method. More experiments and videos can be found in the supplementary materials and on the website: https://sites.google.com/view/tac-needlethreading.
Visual-Tactile Sensing for In-Hand Object Reconstruction
Mar 25, 2023Tactile sensing is one of the modalities humans rely on heavily to perceive the world. Working with vision, this modality refines local geometry structure, measures deformation at the contact area, and indicates the hand-object contact state. With the availability of open-source tactile sensors such as DIGIT, research on visual-tactile learning is becoming more accessible and reproducible. Leveraging this tactile sensor, we propose a novel visual-tactile in-hand object reconstruction framework \textbf{VTacO}, and extend it to \textbf{VTacOH} for hand-object reconstruction. Since our method can support both rigid and deformable object reconstruction, no existing benchmarks are proper for the goal. We propose a simulation environment, VT-Sim, which supports generating hand-object interaction for both rigid and deformable objects. With VT-Sim, we generate a large-scale training dataset and evaluate our method on it. Extensive experiments demonstrate that our proposed method can outperform the previous baseline methods qualitatively and quantitatively. Finally, we directly apply our model trained in simulation to various real-world test cases, which display qualitative results. Codes, models, simulation environment, and datasets are available at \url{https://sites.google.com/view/vtaco/}.