 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHodgeCover: Higher-Order Topological Coverage Drives Compression of Sparse Mixture-of-Experts
May 13, 2026Sparse Mixture-of-Experts (MoE) layers route tokens through a handful of experts, and learning-free compression of these layers reduces inference cost without retraining. A subtle obstruction blocks every existing compressor in this family: three experts can each be pairwise compatible yet form an irreducible cycle when merged together, so any score that ranks experts on pairwise signals is structurally blind to which triples are jointly mergeable. We show the obstruction is a precise mathematical object, the harmonic kernel of the simplicial Laplacian on a 2-complex whose vertices are experts, whose edges carry KL merge barriers, and whose faces carry triplet barriers; Hodge-decomposing the edge-barrier signal isolates the kernel exactly. We turn the diagnostic into a selection objective: HodgeCover greedily covers the harmonic-critical edges and triplet-critical triangles, and a hybrid variant of HodgeCover pairs it with off-the-shelf weight pruning on survivors. On three open-weight Sparse MoE backbones under aggressive expert reduction, HodgeCover matches state-of-the-art learning-free baselines on the expert-reduction axis, leads on the aggressive-compression frontier of the hybrid axis, and uniquely balances retained mass across all four Hodge components. These results show that exposing the harmonic kernel of a learned MoE structure changes which compressor wins at the regime that matters most.
Topology-Preserving Neural Operator Learning via Hodge Decomposition
May 13, 2026In this paper, we study solution operators of physical field equations on geometric meshes from a function-space perspective. We reveal that Hodge orthogonality fundamentally resolves spectral interference by isolating unlearnable topological degrees of freedom from learnable geometric dynamics, enabling an additive approximation confined to structure-preserving subspaces. Building on Hodge theory and operator splitting, we derive a principled operator-level decomposition. The result is a Hybrid Eulerian-Lagrangian architecture with an algebraic-level inductive bias we call Hodge Spectral Duality (HSD). In our framework, we use discrete differential forms to capture topology-dominated components and an orthogonal auxiliary ambient space to represent complex local dynamics. Our method achieves superior accuracy and efficiency on geometric graphs with enhanced fidelity to physical invariants. Our code is available at https://github.com/ContinuumCoder/Hodge-Spectral-Duality
Neural Field Thermal Tomography: A Differentiable Physics Framework for Non-Destructive Evaluation
Mar 11, 2026We propose Neural Field Thermal Tomography (NeFTY), a differentiable physics framework for the quantitative 3D reconstruction of material properties from transient surface temperature measurements. While traditional thermography relies on pixel-wise 1D approximations that neglect lateral diffusion, and soft-constrained Physics-Informed Neural Networks (PINNs) often fail in transient diffusion scenarios due to gradient stiffness, NeFTY parameterizes the 3D diffusivity field as a continuous neural field optimized through a rigorous numerical solver. By leveraging a differentiable physics solver, our approach enforces thermodynamic laws as hard constraints while maintaining the memory efficiency required for high-resolution 3D tomography. Our discretize-then-optimize paradigm effectively mitigates the spectral bias and ill-posedness inherent in inverse heat conduction, enabling the recovery of subsurface defects at arbitrary scales. Experimental validation on synthetic data demonstrates that NeFTY significantly improves the accuracy of subsurface defect localization over baselines. Additional details at https://cab-lab-princeton.github.io/nefty/
Multiscale Cross-Modal Mapping of Molecular, Pathologic, and Radiologic Phenotypes in Lipid-Deficient Clear Cell Renal CellCarcinoma
Dec 13, 2025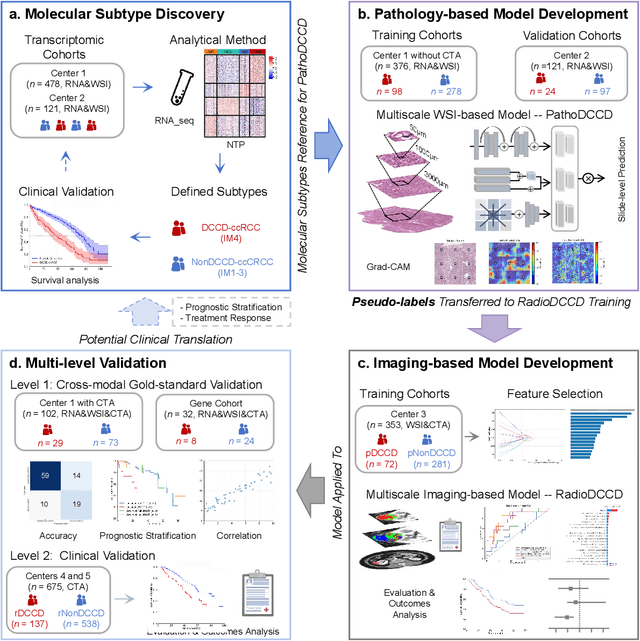
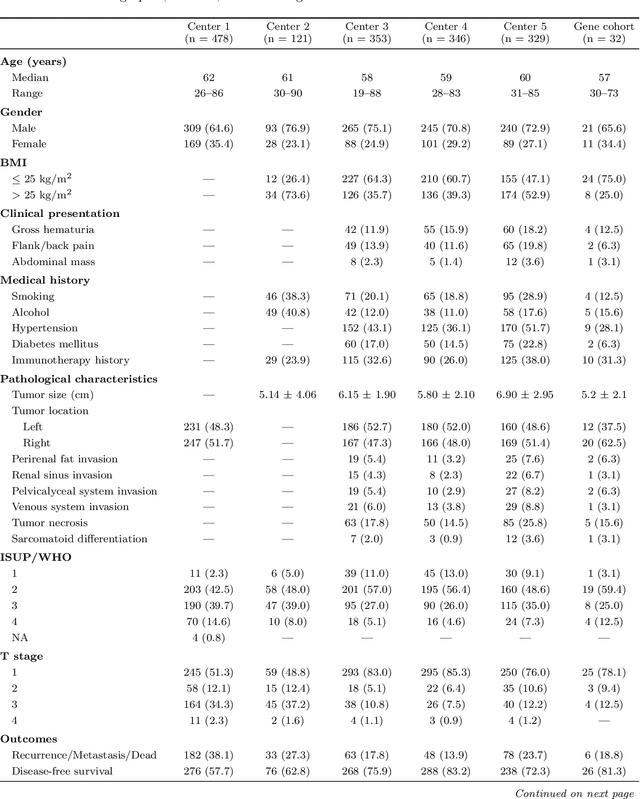
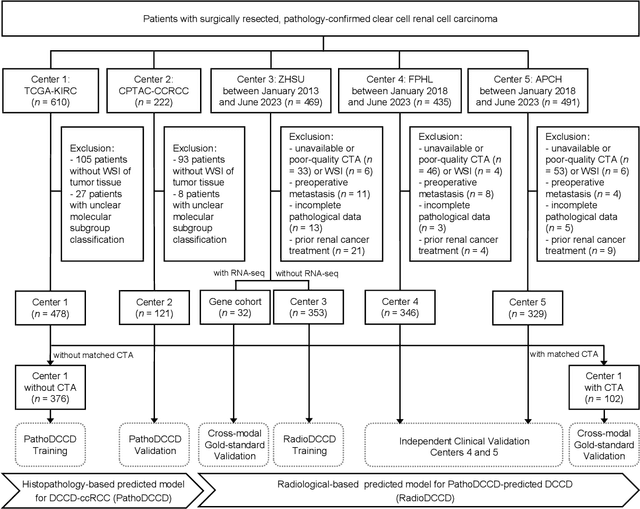
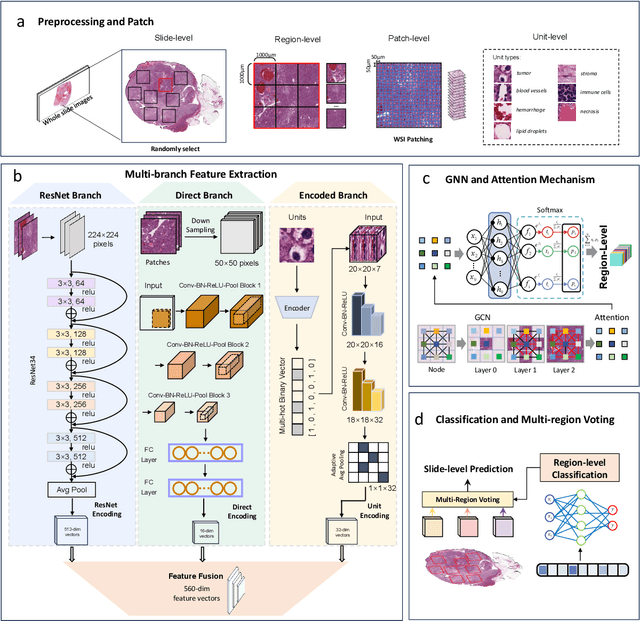
Clear cell renal cell carcinoma (ccRCC) exhibits extensive intratumoral heterogeneity on multiple biological scales, contributing to variable clinical outcomes and limiting the effectiveness of conventional TNM staging, which highlights the urgent need for multiscale integrative analytic frameworks. The lipid-deficient de-clear cell differentiated (DCCD) ccRCC subtype, defined by multi-omics analyses, is associated with adverse outcomes even in early-stage disease. Here, we establish a hierarchical cross-scale framework for the preoperative identification of DCCD-ccRCC. At the highest layer, cross-modal mapping transferred molecular signatures to histological and CT phenotypes, establishing a molecular-to-pathology-to-radiology supervisory bridge. Within this framework, each modality-specific model is designed to mirror the inherent hierarchical structure of tumor biology. PathoDCCD captured multi-scale microscopic features, from cellular morphology and tissue architecture to meso-regional organization. RadioDCCD integrated complementary macroscopic information by combining whole-tumor and its habitat-subregions radiomics with a 2D maximal-section heterogeneity metric. These nested models enabled integrated molecular subtype prediction and clinical risk stratification. Across five cohorts totaling 1,659 patients, PathoDCCD reliably recapitulated molecular subtypes, while RadioDCCD provided reliable preoperative prediction. The consistent predictions identified patients with the poorest clinical outcomes. This cross-scale paradigm unifies molecular biology, computational pathology, and quantitative radiology into a biologically grounded strategy for preoperative noninvasive molecular phenotyping of ccRCC.
ArtGS:3D Gaussian Splatting for Interactive Visual-Physical Modeling and Manipulation of Articulated Objects
Jul 03, 2025Articulated object manipulation remains a critical challenge in robotics due to the complex kinematic constraints and the limited physical reasoning of existing methods. In this work, we introduce ArtGS, a novel framework that extends 3D Gaussian Splatting (3DGS) by integrating visual-physical modeling for articulated object understanding and interaction. ArtGS begins with multi-view RGB-D reconstruction, followed by reasoning with a vision-language model (VLM) to extract semantic and structural information, particularly the articulated bones. Through dynamic, differentiable 3DGS-based rendering, ArtGS optimizes the parameters of the articulated bones, ensuring physically consistent motion constraints and enhancing the manipulation policy. By leveraging dynamic Gaussian splatting, cross-embodiment adaptability, and closed-loop optimization, ArtGS establishes a new framework for efficient, scalable, and generalizable articulated object modeling and manipulation. Experiments conducted in both simulation and real-world environments demonstrate that ArtGS significantly outperforms previous methods in joint estimation accuracy and manipulation success rates across a variety of articulated objects. Additional images and videos are available on the project website: https://sites.google.com/view/artgs/home
Learning Dynamics under Environmental Constraints via Measurement-Induced Bundle Structures
May 26, 2025Learning unknown dynamics under environmental (or external) constraints is fundamental to many fields (e.g., modern robotics), particularly challenging when constraint information is only locally available and uncertain. Existing approaches requiring global constraints or using probabilistic filtering fail to fully exploit the geometric structure inherent in local measurements (by using, e.g., sensors) and constraints. This paper presents a geometric framework unifying measurements, constraints, and dynamics learning through a fiber bundle structure over the state space. This naturally induced geometric structure enables measurement-aware Control Barrier Functions that adapt to local sensing (or measurement) conditions. By integrating Neural ODEs, our framework learns continuous-time dynamics while preserving geometric constraints, with theoretical guarantees of learning convergence and constraint satisfaction dependent on sensing quality. The geometric framework not only enables efficient dynamics learning but also suggests promising directions for integration with reinforcement learning approaches. Extensive simulations demonstrate significant improvements in both learning efficiency and constraint satisfaction over traditional methods, especially under limited and uncertain sensing conditions.
ControlSynth Neural ODEs: Modeling Dynamical Systems with Guaranteed Convergence
Nov 04, 2024



Neural ODEs (NODEs) are continuous-time neural networks (NNs) that can process data without the limitation of time intervals. They have advantages in learning and understanding the evolution of complex real dynamics. Many previous works have focused on NODEs in concise forms, while numerous physical systems taking straightforward forms, in fact, belong to their more complex quasi-classes, thus appealing to a class of general NODEs with high scalability and flexibility to model those systems. This, however, may result in intricate nonlinear properties. In this paper, we introduce ControlSynth Neural ODEs (CSODEs). We show that despite their highly nonlinear nature, convergence can be guaranteed via tractable linear inequalities. In the composition of CSODEs, we introduce an extra control term for learning the potential simultaneous capture of dynamics at different scales, which could be particularly useful for partial differential equation-formulated systems. Finally, we compare several representative NNs with CSODEs on important physical dynamics under the inductive biases of CSODEs, and illustrate that CSODEs have better learning and predictive abilities in these settings.
Differentiable Cloth Parameter Identification and State Estimation in Manipulation
Nov 09, 2023In the realm of robotic cloth manipulation, accurately estimating the cloth state during or post-execution is imperative. However, the inherent complexities in a cloth's dynamic behavior and its near-infinite degrees of freedom (DoF) pose significant challenges. Traditional methods have been restricted to using keypoints or boundaries as cues for cloth state, which do not holistically capture the cloth's structure, especially during intricate tasks like folding. Additionally, the critical influence of cloth physics has often been overlooked in past research. Addressing these concerns, we introduce DiffCP, a novel differentiable pipeline that leverages the Anisotropic Elasto-Plastic (A-EP) constitutive model, tailored for differentiable computation and robotic tasks. DiffCP adopts a ``real-to-sim-to-real'' methodology. By observing real-world cloth states through an RGB-D camera and projecting this data into a differentiable simulator, the system identifies physics parameters by minimizing the geometric variance between observed and target states. Extensive experiments demonstrate DiffCP's ability and stability to determine physics parameters under varying manipulations, grasping points, and speeds. Additionally, its applications extend to cloth material identification, manipulation trajectory generation, and more notably, enhancing cloth pose estimation accuracy. More experiments and videos can be found in the supplementary materials and on the website: https://sites.google.com/view/diffcp.
Differentiable Fluid Physics Parameter Identification Via Stirring
Nov 09, 2023
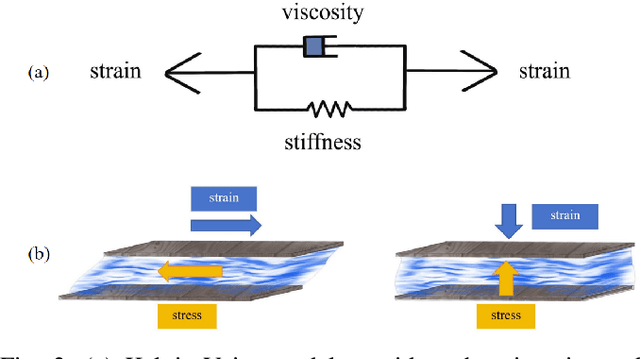


Fluid interactions permeate daily human activities, with properties like density and viscosity playing pivotal roles in household tasks. While density estimation is straightforward through Archimedes' principle, viscosity poses a more intricate challenge, especially given the varied behaviors of Newtonian and non-Newtonian fluids. These fluids, which differ in their stress-strain relationships, are delineated by specific constitutive models such as the Carreau, Cross, and Herschel-Bulkley models, each possessing unique viscosity parameters. This study introduces a novel differentiable fitting framework, DiffStir, tailored to identify key physics parameters via the common daily operation of stirring. By employing a robotic arm for stirring and harnessing a differentiable Material Point Method (diffMPM)-based simulator, the framework can determine fluid parameters by matching observations from both the simulator and the real world. Recognizing the distinct preferences of the aforementioned constitutive models for specific fluids, an online strategy was adopted to adaptively select the most fitting model based on real-world data. Additionally, we propose a refining neural network to bridge the sim-to-real gap and mitigate sensor noise-induced inaccuracies. Comprehensive experiments were conducted to validate the efficacy of DiffStir, showcasing its precision in parameter estimation when benchmarked against reported literature values. More experiments and videos can be found in the supplementary materials and on the website: https://sites.google.com/view/diffstir.
UniFolding: Towards Sample-efficient, Scalable, and Generalizable Robotic Garment Folding
Nov 02, 2023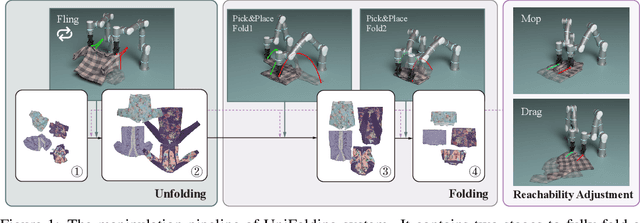
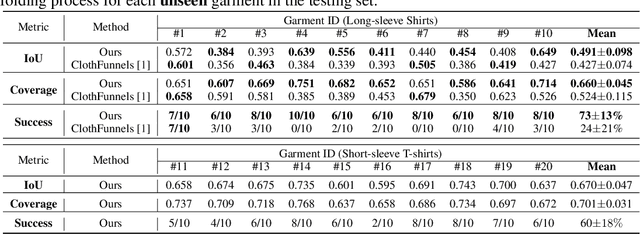
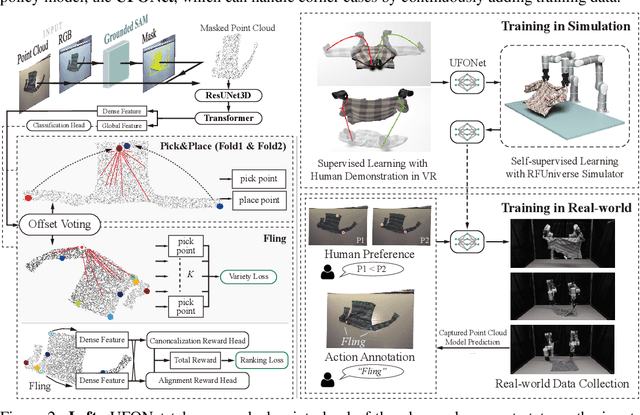
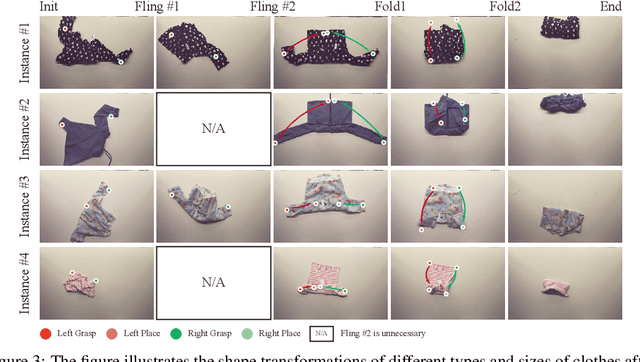
This paper explores the development of UniFolding, a sample-efficient, scalable, and generalizable robotic system for unfolding and folding various garments. UniFolding employs the proposed UFONet neural network to integrate unfolding and folding decisions into a single policy model that is adaptable to different garment types and states. The design of UniFolding is based on a garment's partial point cloud, which aids in generalization and reduces sensitivity to variations in texture and shape. The training pipeline prioritizes low-cost, sample-efficient data collection. Training data is collected via a human-centric process with offline and online stages. The offline stage involves human unfolding and folding actions via Virtual Reality, while the online stage utilizes human-in-the-loop learning to fine-tune the model in a real-world setting. The system is tested on two garment types: long-sleeve and short-sleeve shirts. Performance is evaluated on 20 shirts with significant variations in textures, shapes, and materials. More experiments and videos can be found in the supplementary materials and on the website: https://unifolding.robotflow.ai