 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine-Tuning Flow Matching via Maximum Likelihood Estimation of Reconstructions
Oct 02, 2025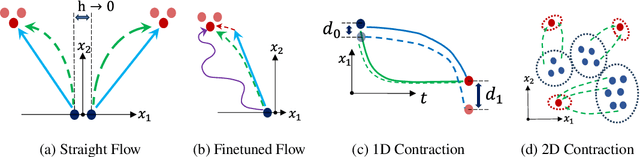
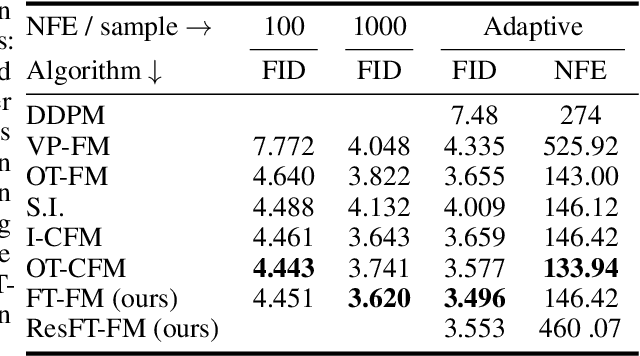
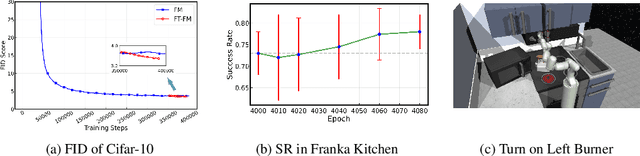
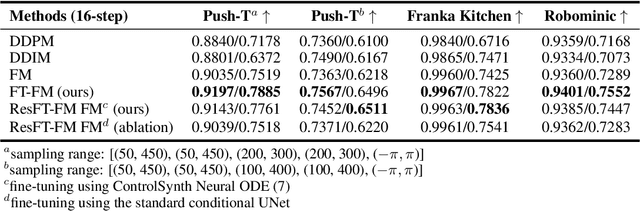
Flow Matching (FM) algorithm achieves remarkable results in generative tasks especially in robotic manipulation. Building upon the foundations of diffusion models, the simulation-free paradigm of FM enables simple and efficient training, but inherently introduces a train-inference gap. Specifically, we cannot assess the model's output during the training phase. In contrast, other generative models including Variational Autoencoder (VAE), Normalizing Flow and Generative Adversarial Networks (GANs) directly optimize on the reconstruction loss. Such a gap is particularly evident in scenarios that demand high precision, such as robotic manipulation. Moreover, we show that FM's over-pursuit of straight predefined paths may introduce some serious problems such as stiffness into the system. These motivate us to fine-tune FM via Maximum Likelihood Estimation of reconstructions - an approach made feasible by FM's underlying smooth ODE formulation, in contrast to the stochastic differential equations (SDEs) used in diffusion models. This paper first theoretically analyzes the relation between training loss and inference error in FM. Then we propose a method of fine-tuning FM via Maximum Likelihood Estimation of reconstructions, which includes both straightforward fine-tuning and residual-based fine-tuning approaches. Furthermore, through specifically designed architectures, the residual-based fine-tuning can incorporate the contraction property into the model, which is crucial for the model's robustness and interpretability. Experimental results in image generation and robotic manipulation verify that our method reliably improves the inference performance of FM.
Learning and Current Prediction of PMSM Drive via Differential Neural Networks
Dec 12, 2024Learning models for dynamical systems in continuous time is significant for understanding complex phenomena and making accurate predictions. This study presents a novel approach utilizing differential neural networks (DNNs) to model nonlinear systems, specifically permanent magnet synchronous motors (PMSMs), and to predict their current trajectories. The efficacy of our approach is validated through experiments conducted under various load disturbances and no-load conditions. The results demonstrate that our method effectively and accurately reconstructs the original systems, showcasing strong short-term and long-term prediction capabilities and robustness. This study provides valuable insights into learning the inherent dynamics of complex dynamical data and holds potential for further applications in fields such as weather forecasting, robotics, and collective behavior analysis.
ICODE: Modeling Dynamical Systems with Extrinsic Input Information
Nov 21, 2024



Learning models of dynamical systems with external inputs, that may be, for example, nonsmooth or piecewise, is crucial for studying complex phenomena and predicting future state evolution, which is essential for applications such as safety guarantees and decision-making. In this work, we introduce \emph{Input Concomitant Neural ODEs (ICODEs)}, which incorporate precise real-time input information into the learning process of the models, rather than treating the inputs as hidden parameters to be learned. The sufficient conditions to ensure the model's contraction property are provided to guarantee that system trajectories of the trained model converge to a fixed point, regardless of initial conditions across different training processes. We validate our method through experiments on several representative real dynamics: Single-link robot, DC-to-DC converter, motion dynamics of a rigid body, Rabinovich-Fabrikant equation, Glycolytic-glycogenolytic pathway model, and heat conduction equation. The experimental results demonstrate that our proposed ICODEs efficiently learn the ground truth systems, achieving superior prediction performance under both typical and atypical inputs. This work offers a valuable class of neural ODE models for understanding physical systems with explicit external input information, with potential promising applications in fields such as physics and robotics.
ControlSynth Neural ODEs: Modeling Dynamical Systems with Guaranteed Convergence
Nov 04, 2024



Neural ODEs (NODEs) are continuous-time neural networks (NNs) that can process data without the limitation of time intervals. They have advantages in learning and understanding the evolution of complex real dynamics. Many previous works have focused on NODEs in concise forms, while numerous physical systems taking straightforward forms, in fact, belong to their more complex quasi-classes, thus appealing to a class of general NODEs with high scalability and flexibility to model those systems. This, however, may result in intricate nonlinear properties. In this paper, we introduce ControlSynth Neural ODEs (CSODEs). We show that despite their highly nonlinear nature, convergence can be guaranteed via tractable linear inequalities. In the composition of CSODEs, we introduce an extra control term for learning the potential simultaneous capture of dynamics at different scales, which could be particularly useful for partial differential equation-formulated systems. Finally, we compare several representative NNs with CSODEs on important physical dynamics under the inductive biases of CSODEs, and illustrate that CSODEs have better learning and predictive abilities in these settings.
Flexible Active Safety Motion Control for Robotic Obstacle Avoidance: A CBF-Guided MPC Approach
May 20, 2024



A flexible active safety motion (FASM) control approach is proposed for the avoidance of dynamic obstacles and the reference tracking in robot manipulators. The distinctive feature of the proposed method lies in its utilization of control barrier functions (CBF) to design flexible CBF-guided safety criteria (CBFSC) with dynamically optimized decay rates, thereby offering flexibility and active safety for robot manipulators in dynamic environments. First, discrete-time CBFs are employed to formulate the novel flexible CBFSC with dynamic decay rates for robot manipulators. Following that, the model predictive control (MPC) philosophy is applied, integrating flexible CBFSC as safety constraints into the receding-horizon optimization problem. Significantly, the decay rates of the designed CBFSC are incorporated as decision variables in the optimization problem, facilitating the dynamic enhancement of flexibility during the obstacle avoidance process. In particular, a novel cost function that integrates a penalty term is designed to dynamically adjust the safety margins of the CBFSC. Finally, experiments are conducted in various scenarios using a Universal Robots 5 (UR5) manipulator to validate the effectiveness of the proposed approach.
Guarding Force: Safety-Critical Compliant Control for Robot-Environment Interaction
May 08, 2024



In this study, we propose a safety-critical compliant control strategy designed to strictly enforce interaction force constraints during the physical interaction of robots with unknown environments. The interaction force constraint is interpreted as a new force-constrained control barrier function (FC-CBF) by exploiting the generalized contact model and the prior information of the environment, i.e., the prior stiffness and rest position, for robot kinematics. The difference between the real environment and the generalized contact model is approximated by constructing a tracking differentiator, and its estimation error is quantified based on Lyapunov theory. By interpreting strict interaction safety specification as a dynamic constraint, restricting the desired joint angular rates in kinematics, the proposed approach modifies nominal compliant controllers using quadratic programming, ensuring adherence to interaction force constraints in unknown environments. The strict force constraint and the stability of the closed-loop system are rigorously analyzed. Experimental tests using a UR3e industrial robot with different environments verify the effectiveness of the proposed method in achieving the force constraints in unknown environments.
Active Admittance Control with Iterative Learning for General-Purpose Contact-Rich Manipulation
Mar 25, 2024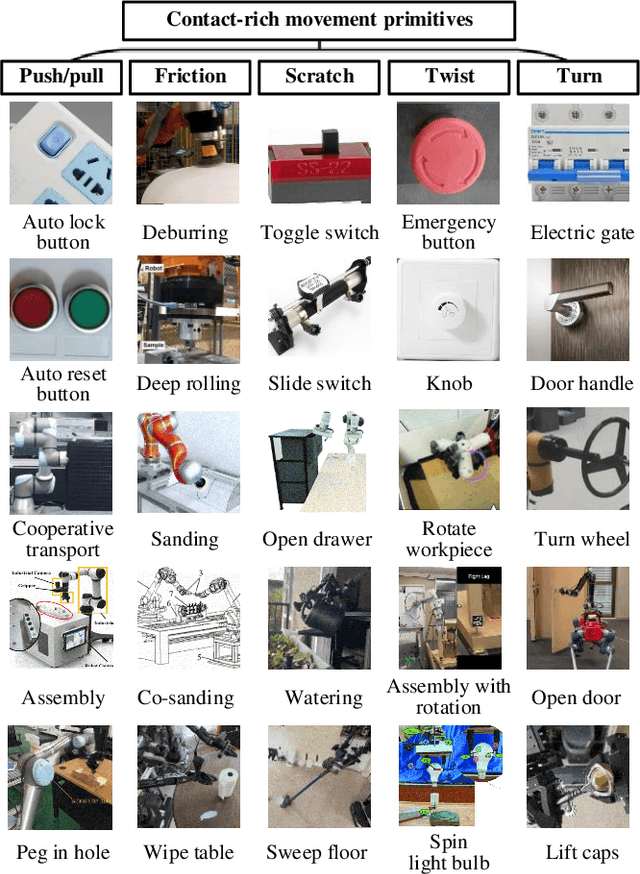
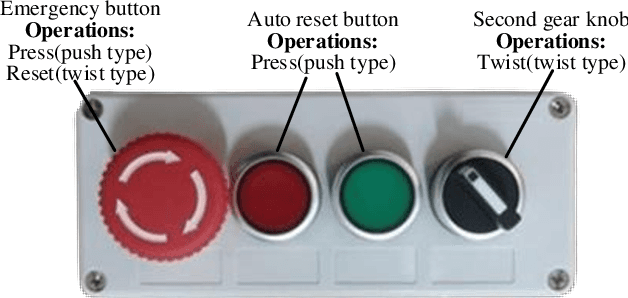
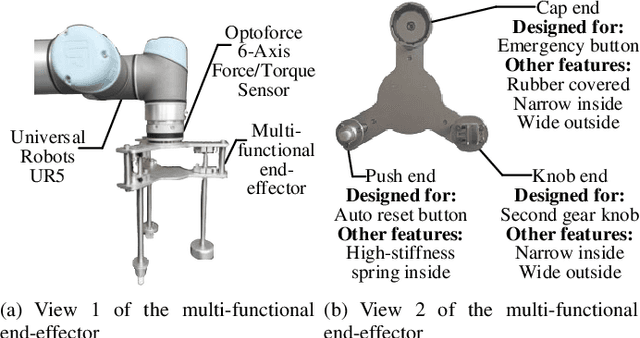
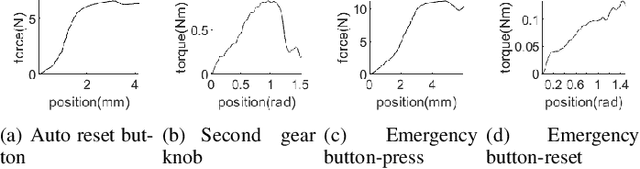
Force interaction is inevitable when robots face multiple operation scenarios. How to make the robot competent in force control for generalized operations such as multi-tasks still remains a challenging problem. Aiming at the reproducibility of interaction tasks and the lack of a generalized force control framework for multi-task scenarios, this paper proposes a novel hybrid control framework based on active admittance control with iterative learning parameters-tunning mechanism. The method adopts admittance control as the underlying algorithm to ensure flexibility, and iterative learning as the high-level algorithm to regulate the parameters of the admittance model. The whole algorithm has flexibility and learning ability, which is capable of achieving the goal of excellent versatility. Four representative interactive robot manipulation tasks are chosen to investigate the consistency and generalisability of the proposed method. Experiments are designed to verify the effectiveness of the whole framework, and an average of 98.21% and 91.52% improvement of RMSE is obtained relative to the traditional admittance control as well as the model-free adaptive control, respectively.
COCAS: A Large-Scale Clothes Changing Person Dataset for Re-identification
May 16, 2020



Recent years have witnessed great progress in person re-identification (re-id). Several academic benchmarks such as Market1501, CUHK03 and DukeMTMC play important roles to promote the re-id research. To our best knowledge, all the existing benchmarks assume the same person will have the same clothes. While in real-world scenarios, it is very often for a person to change clothes. To address the clothes changing person re-id problem, we construct a novel large-scale re-id benchmark named ClOthes ChAnging Person Set (COCAS), which provides multiple images of the same identity with different clothes. COCAS totally contains 62,382 body images from 5,266 persons. Based on COCAS, we introduce a new person re-id setting for clothes changing problem, where the query includes both a clothes template and a person image taking another clothes. Moreover, we propose a two-branch network named Biometric-Clothes Network (BC-Net) which can effectively integrate biometric and clothes feature for re-id under our setting. Experiments show that it is feasible for clothes changing re-id with clothes templates.