 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe MiniMax-M2 Series: Mini Activations Unleashing Max Real-World Intelligence
May 26, 2026We introduce the MiniMax-M2 series, a family of Mixture-of-Experts language models built around the principle that mini activations can unleash maximum real-world intelligence. The flagship M2 contains 229.9B total parameters with only 9.8B activated per token. Designed end-to-end for agentic deployment, the M2 series rests on three components: (i) agent-driven data pipelines producing large-scale, verifiable trajectories across agentic coding and agentic cowork, each grounded in an executable workspace and an artifact-aligned reward; (ii) Forge, a scalable agent-native RL system that adapts to long-horizon agent trajectories, paired with windowed-FIFO scheduling, prefix-tree merging, inference optimization, and a clean training-inference-agent decoupling that supports both white-box and black-box agents; (iii) the latest M2.7 checkpoint takes an early step toward self-evolution -- autonomously debugging training runs and modifying its own scaffold. Across M2 through M2.7, this combination translates a mini-activation footprint into frontier-tier performance on agentic coding, deep search, office-task, and reasoning benchmarks.
Attention Residuals
Mar 16, 2026Residual connections with PreNorm are standard in modern LLMs, yet they accumulate all layer outputs with fixed unit weights. This uniform aggregation causes uncontrolled hidden-state growth with depth, progressively diluting each layer's contribution. We propose Attention Residuals (AttnRes), which replaces this fixed accumulation with softmax attention over preceding layer outputs, allowing each layer to selectively aggregate earlier representations with learned, input-dependent weights. To address the memory and communication overhead of attending over all preceding layer outputs for large-scale model training, we introduce Block AttnRes, which partitions layers into blocks and attends over block-level representations, reducing the memory footprint while preserving most of the gains of full AttnRes. Combined with cache-based pipeline communication and a two-phase computation strategy, Block AttnRes becomes a practical drop-in replacement for standard residual connections with minimal overhead. Scaling law experiments confirm that the improvement is consistent across model sizes, and ablations validate the benefit of content-dependent depth-wise selection. We further integrate AttnRes into the Kimi Linear architecture (48B total / 3B activated parameters) and pre-train on 1.4T tokens, where AttnRes mitigates PreNorm dilution, yielding more uniform output magnitudes and gradient distribution across depth, and improves downstream performance across all evaluated tasks.
Kimi K2.5: Visual Agentic Intelligence
Feb 02, 2026We introduce Kimi K2.5, an open-source multimodal agentic model designed to advance general agentic intelligence. K2.5 emphasizes the joint optimization of text and vision so that two modalities enhance each other. This includes a series of techniques such as joint text-vision pre-training, zero-vision SFT, and joint text-vision reinforcement learning. Building on this multimodal foundation, K2.5 introduces Agent Swarm, a self-directed parallel agent orchestration framework that dynamically decomposes complex tasks into heterogeneous sub-problems and executes them concurrently. Extensive evaluations show that Kimi K2.5 achieves state-of-the-art results across various domains including coding, vision, reasoning, and agentic tasks. Agent Swarm also reduces latency by up to $4.5\times$ over single-agent baselines. We release the post-trained Kimi K2.5 model checkpoint to facilitate future research and real-world applications of agentic intelligence.
Kimi Linear: An Expressive, Efficient Attention Architecture
Oct 30, 2025We introduce Kimi Linear, a hybrid linear attention architecture that, for the first time, outperforms full attention under fair comparisons across various scenarios -- including short-context, long-context, and reinforcement learning (RL) scaling regimes. At its core lies Kimi Delta Attention (KDA), an expressive linear attention module that extends Gated DeltaNet with a finer-grained gating mechanism, enabling more effective use of limited finite-state RNN memory. Our bespoke chunkwise algorithm achieves high hardware efficiency through a specialized variant of the Diagonal-Plus-Low-Rank (DPLR) transition matrices, which substantially reduces computation compared to the general DPLR formulation while remaining more consistent with the classical delta rule. We pretrain a Kimi Linear model with 3B activated parameters and 48B total parameters, based on a layerwise hybrid of KDA and Multi-Head Latent Attention (MLA). Our experiments show that with an identical training recipe, Kimi Linear outperforms full MLA with a sizeable margin across all evaluated tasks, while reducing KV cache usage by up to 75% and achieving up to 6 times decoding throughput for a 1M context. These results demonstrate that Kimi Linear can be a drop-in replacement for full attention architectures with superior performance and efficiency, including tasks with longer input and output lengths. To support further research, we open-source the KDA kernel and vLLM implementations, and release the pre-trained and instruction-tuned model checkpoints.
Kimi K2: Open Agentic Intelligence
Jul 28, 2025



We introduce Kimi K2, a Mixture-of-Experts (MoE) large language model with 32 billion activated parameters and 1 trillion total parameters. We propose the MuonClip optimizer, which improves upon Muon with a novel QK-clip technique to address training instability while enjoying the advanced token efficiency of Muon. Based on MuonClip, K2 was pre-trained on 15.5 trillion tokens with zero loss spike. During post-training, K2 undergoes a multi-stage post-training process, highlighted by a large-scale agentic data synthesis pipeline and a joint reinforcement learning (RL) stage, where the model improves its capabilities through interactions with real and synthetic environments. Kimi K2 achieves state-of-the-art performance among open-source non-thinking models, with strengths in agentic capabilities. Notably, K2 obtains 66.1 on Tau2-Bench, 76.5 on ACEBench (En), 65.8 on SWE-Bench Verified, and 47.3 on SWE-Bench Multilingual -- surpassing most open and closed-sourced baselines in non-thinking settings. It also exhibits strong capabilities in coding, mathematics, and reasoning tasks, with a score of 53.7 on LiveCodeBench v6, 49.5 on AIME 2025, 75.1 on GPQA-Diamond, and 27.1 on OJBench, all without extended thinking. These results position Kimi K2 as one of the most capable open-source large language models to date, particularly in software engineering and agentic tasks. We release our base and post-trained model checkpoints to facilitate future research and applications of agentic intelligence.
MiniMax-M1: Scaling Test-Time Compute Efficiently with Lightning Attention
Jun 16, 2025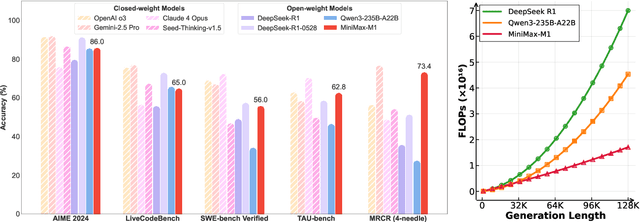

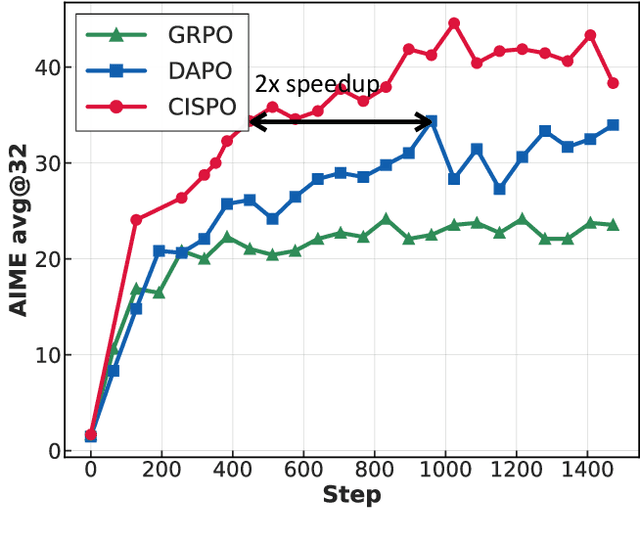
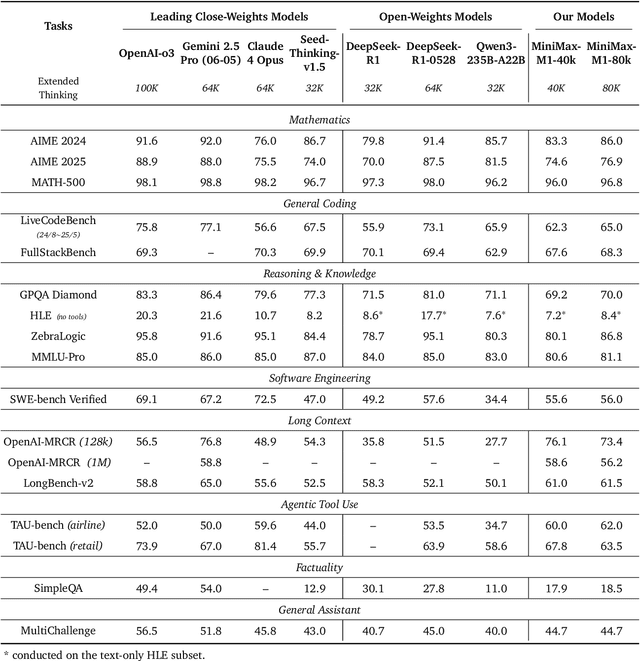
We introduce MiniMax-M1, the world's first open-weight, large-scale hybrid-attention reasoning model. MiniMax-M1 is powered by a hybrid Mixture-of-Experts (MoE) architecture combined with a lightning attention mechanism. The model is developed based on our previous MiniMax-Text-01 model, which contains a total of 456 billion parameters with 45.9 billion parameters activated per token. The M1 model natively supports a context length of 1 million tokens, 8x the context size of DeepSeek R1. Furthermore, the lightning attention mechanism in MiniMax-M1 enables efficient scaling of test-time compute. These properties make M1 particularly suitable for complex tasks that require processing long inputs and thinking extensively. MiniMax-M1 is trained using large-scale reinforcement learning (RL) on diverse problems including sandbox-based, real-world software engineering environments. In addition to M1's inherent efficiency advantage for RL training, we propose CISPO, a novel RL algorithm to further enhance RL efficiency. CISPO clips importance sampling weights rather than token updates, outperforming other competitive RL variants. Combining hybrid-attention and CISPO enables MiniMax-M1's full RL training on 512 H800 GPUs to complete in only three weeks, with a rental cost of just $534,700. We release two versions of MiniMax-M1 models with 40K and 80K thinking budgets respectively, where the 40K model represents an intermediate phase of the 80K training. Experiments on standard benchmarks show that our models are comparable or superior to strong open-weight models such as the original DeepSeek-R1 and Qwen3-235B, with particular strengths in complex software engineering, tool utilization, and long-context tasks. We publicly release MiniMax-M1 at https://github.com/MiniMax-AI/MiniMax-M1.
SynLogic: Synthesizing Verifiable Reasoning Data at Scale for Learning Logical Reasoning and Beyond
May 26, 2025Recent advances such as OpenAI-o1 and DeepSeek R1 have demonstrated the potential of Reinforcement Learning (RL) to enhance reasoning abilities in Large Language Models (LLMs). While open-source replication efforts have primarily focused on mathematical and coding domains, methods and resources for developing general reasoning capabilities remain underexplored. This gap is partly due to the challenge of collecting diverse and verifiable reasoning data suitable for RL. We hypothesize that logical reasoning is critical for developing general reasoning capabilities, as logic forms a fundamental building block of reasoning. In this work, we present SynLogic, a data synthesis framework and dataset that generates diverse logical reasoning data at scale, encompassing 35 diverse logical reasoning tasks. The SynLogic approach enables controlled synthesis of data with adjustable difficulty and quantity. Importantly, all examples can be verified by simple rules, making them ideally suited for RL with verifiable rewards. In our experiments, we validate the effectiveness of RL training on the SynLogic dataset based on 7B and 32B models. SynLogic leads to state-of-the-art logical reasoning performance among open-source datasets, surpassing DeepSeek-R1-Distill-Qwen-32B by 6 points on BBEH. Furthermore, mixing SynLogic data with mathematical and coding tasks improves the training efficiency of these domains and significantly enhances reasoning generalization. Notably, our mixed training model outperforms DeepSeek-R1-Zero-Qwen-32B across multiple benchmarks. These findings position SynLogic as a valuable resource for advancing the broader reasoning capabilities of LLMs. We open-source both the data synthesis pipeline and the SynLogic dataset at https://github.com/MiniMax-AI/SynLogic.
One RL to See Them All: Visual Triple Unified Reinforcement Learning
May 23, 2025
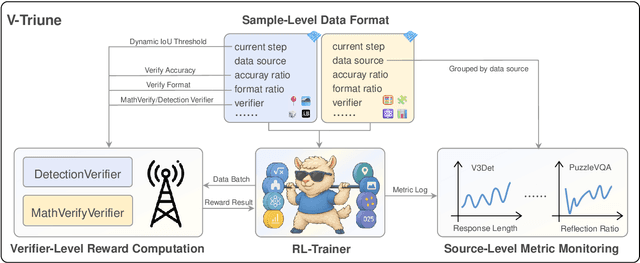
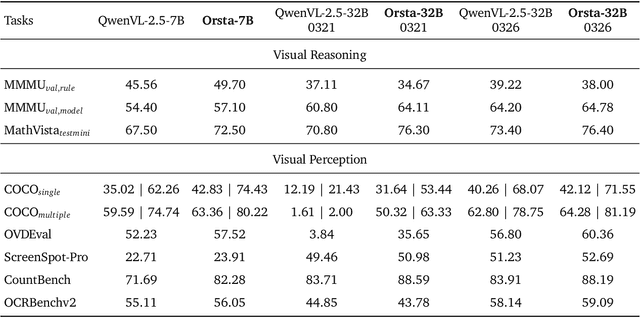
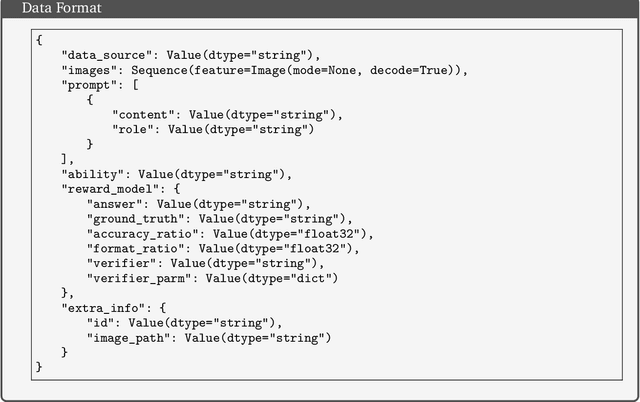
Reinforcement learning (RL) has significantly advanced the reasoning capabilities of vision-language models (VLMs). However, the use of RL beyond reasoning tasks remains largely unexplored, especially for perceptionintensive tasks like object detection and grounding. We propose V-Triune, a Visual Triple Unified Reinforcement Learning system that enables VLMs to jointly learn visual reasoning and perception tasks within a single training pipeline. V-Triune comprises triple complementary components: Sample-Level Data Formatting (to unify diverse task inputs), Verifier-Level Reward Computation (to deliver custom rewards via specialized verifiers) , and Source-Level Metric Monitoring (to diagnose problems at the data-source level). We further introduce a novel Dynamic IoU reward, which provides adaptive, progressive, and definite feedback for perception tasks handled by V-Triune. Our approach is instantiated within off-the-shelf RL training framework using open-source 7B and 32B backbone models. The resulting model, dubbed Orsta (One RL to See Them All), demonstrates consistent improvements across both reasoning and perception tasks. This broad capability is significantly shaped by its training on a diverse dataset, constructed around four representative visual reasoning tasks (Math, Puzzle, Chart, and Science) and four visual perception tasks (Grounding, Detection, Counting, and OCR). Subsequently, Orsta achieves substantial gains on MEGA-Bench Core, with improvements ranging from +2.1 to an impressive +14.1 across its various 7B and 32B model variants, with performance benefits extending to a wide range of downstream tasks. These results highlight the effectiveness and scalability of our unified RL approach for VLMs. The V-Triune system, along with the Orsta models, is publicly available at https://github.com/MiniMax-AI.
MiniMax-Speech: Intrinsic Zero-Shot Text-to-Speech with a Learnable Speaker Encoder
May 12, 2025We introduce MiniMax-Speech, an autoregressive Transformer-based Text-to-Speech (TTS) model that generates high-quality speech. A key innovation is our learnable speaker encoder, which extracts timbre features from a reference audio without requiring its transcription. This enables MiniMax-Speech to produce highly expressive speech with timbre consistent with the reference in a zero-shot manner, while also supporting one-shot voice cloning with exceptionally high similarity to the reference voice. In addition, the overall quality of the synthesized audio is enhanced through the proposed Flow-VAE. Our model supports 32 languages and demonstrates excellent performance across multiple objective and subjective evaluations metrics. Notably, it achieves state-of-the-art (SOTA) results on objective voice cloning metrics (Word Error Rate and Speaker Similarity) and has secured the top position on the public TTS Arena leaderboard. Another key strength of MiniMax-Speech, granted by the robust and disentangled representations from the speaker encoder, is its extensibility without modifying the base model, enabling various applications such as: arbitrary voice emotion control via LoRA; text to voice (T2V) by synthesizing timbre features directly from text description; and professional voice cloning (PVC) by fine-tuning timbre features with additional data. We encourage readers to visit https://minimax-ai.github.io/tts_tech_report for more examples.
Kimi-VL Technical Report
Apr 10, 2025
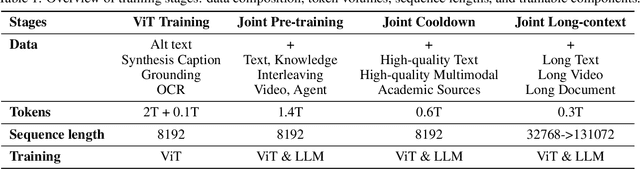
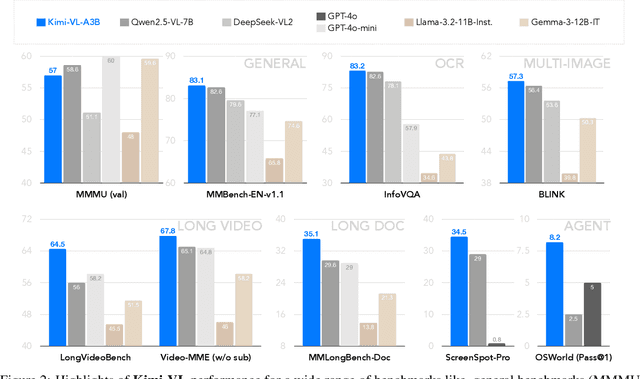

We present Kimi-VL, an efficient open-source Mixture-of-Experts (MoE) vision-language model (VLM) that offers advanced multimodal reasoning, long-context understanding, and strong agent capabilities - all while activating only 2.8B parameters in its language decoder (Kimi-VL-A3B). Kimi-VL demonstrates strong performance across challenging domains: as a general-purpose VLM, Kimi-VL excels in multi-turn agent tasks (e.g., OSWorld), matching flagship models. Furthermore, it exhibits remarkable capabilities across diverse challenging vision language tasks, including college-level image and video comprehension, OCR, mathematical reasoning, and multi-image understanding. In comparative evaluations, it effectively competes with cutting-edge efficient VLMs such as GPT-4o-mini, Qwen2.5-VL-7B, and Gemma-3-12B-IT, while surpassing GPT-4o in several key domains. Kimi-VL also advances in processing long contexts and perceiving clearly. With a 128K extended context window, Kimi-VL can process diverse long inputs, achieving impressive scores of 64.5 on LongVideoBench and 35.1 on MMLongBench-Doc. Its native-resolution vision encoder, MoonViT, further allows it to see and understand ultra-high-resolution visual inputs, achieving 83.2 on InfoVQA and 34.5 on ScreenSpot-Pro, while maintaining lower computational cost for common tasks. Building upon Kimi-VL, we introduce an advanced long-thinking variant: Kimi-VL-Thinking. Developed through long chain-of-thought (CoT) supervised fine-tuning (SFT) and reinforcement learning (RL), this model exhibits strong long-horizon reasoning capabilities. It achieves scores of 61.7 on MMMU, 36.8 on MathVision, and 71.3 on MathVista while maintaining the compact 2.8B activated LLM parameters, setting a new standard for efficient multimodal thinking models. Code and models are publicly accessible at https://github.com/MoonshotAI/Kimi-VL.