 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoRight: Motion Control Done Right
Apr 08, 2026Generating motion-controlled videos--where user-specified actions drive physically plausible scene dynamics under freely chosen viewpoints--demands two capabilities: (1) disentangled motion control, allowing users to separately control the object motion and adjust camera viewpoint; and (2) motion causality, ensuring that user-driven actions trigger coherent reactions from other objects rather than merely displacing pixels. Existing methods fall short on both fronts: they entangle camera and object motion into a single tracking signal and treat motion as kinematic displacement without modeling causal relationships between object motion. We introduce MoRight, a unified framework that addresses both limitations through disentangled motion modeling. Object motion is specified in a canonical static-view and transferred to an arbitrary target camera viewpoint via temporal cross-view attention, enabling disentangled camera and object control. We further decompose motion into active (user-driven) and passive (consequence) components, training the model to learn motion causality from data. At inference, users can either supply active motion and MoRight predicts consequences (forward reasoning), or specify desired passive outcomes and MoRight recovers plausible driving actions (inverse reasoning), all while freely adjusting the camera viewpoint. Experiments on three benchmarks demonstrate state-of-the-art performance in generation quality, motion controllability, and interaction awareness.
Attention Residuals
Mar 16, 2026Residual connections with PreNorm are standard in modern LLMs, yet they accumulate all layer outputs with fixed unit weights. This uniform aggregation causes uncontrolled hidden-state growth with depth, progressively diluting each layer's contribution. We propose Attention Residuals (AttnRes), which replaces this fixed accumulation with softmax attention over preceding layer outputs, allowing each layer to selectively aggregate earlier representations with learned, input-dependent weights. To address the memory and communication overhead of attending over all preceding layer outputs for large-scale model training, we introduce Block AttnRes, which partitions layers into blocks and attends over block-level representations, reducing the memory footprint while preserving most of the gains of full AttnRes. Combined with cache-based pipeline communication and a two-phase computation strategy, Block AttnRes becomes a practical drop-in replacement for standard residual connections with minimal overhead. Scaling law experiments confirm that the improvement is consistent across model sizes, and ablations validate the benefit of content-dependent depth-wise selection. We further integrate AttnRes into the Kimi Linear architecture (48B total / 3B activated parameters) and pre-train on 1.4T tokens, where AttnRes mitigates PreNorm dilution, yielding more uniform output magnitudes and gradient distribution across depth, and improves downstream performance across all evaluated tasks.
Kimi K2.5: Visual Agentic Intelligence
Feb 02, 2026We introduce Kimi K2.5, an open-source multimodal agentic model designed to advance general agentic intelligence. K2.5 emphasizes the joint optimization of text and vision so that two modalities enhance each other. This includes a series of techniques such as joint text-vision pre-training, zero-vision SFT, and joint text-vision reinforcement learning. Building on this multimodal foundation, K2.5 introduces Agent Swarm, a self-directed parallel agent orchestration framework that dynamically decomposes complex tasks into heterogeneous sub-problems and executes them concurrently. Extensive evaluations show that Kimi K2.5 achieves state-of-the-art results across various domains including coding, vision, reasoning, and agentic tasks. Agent Swarm also reduces latency by up to $4.5\times$ over single-agent baselines. We release the post-trained Kimi K2.5 model checkpoint to facilitate future research and real-world applications of agentic intelligence.
OneTrans: Unified Feature Interaction and Sequence Modeling with One Transformer in Industrial Recommender
Oct 30, 2025In recommendation systems, scaling up feature-interaction modules (e.g., Wukong, RankMixer) or user-behavior sequence modules (e.g., LONGER) has achieved notable success. However, these efforts typically proceed on separate tracks, which not only hinders bidirectional information exchange but also prevents unified optimization and scaling. In this paper, we propose OneTrans, a unified Transformer backbone that simultaneously performs user-behavior sequence modeling and feature interaction. OneTrans employs a unified tokenizer to convert both sequential and non-sequential attributes into a single token sequence. The stacked OneTrans blocks share parameters across similar sequential tokens while assigning token-specific parameters to non-sequential tokens. Through causal attention and cross-request KV caching, OneTrans enables precomputation and caching of intermediate representations, significantly reducing computational costs during both training and inference. Experimental results on industrial-scale datasets demonstrate that OneTrans scales efficiently with increasing parameters, consistently outperforms strong baselines, and yields a 5.68% lift in per-user GMV in online A/B tests.
Kimi Linear: An Expressive, Efficient Attention Architecture
Oct 30, 2025We introduce Kimi Linear, a hybrid linear attention architecture that, for the first time, outperforms full attention under fair comparisons across various scenarios -- including short-context, long-context, and reinforcement learning (RL) scaling regimes. At its core lies Kimi Delta Attention (KDA), an expressive linear attention module that extends Gated DeltaNet with a finer-grained gating mechanism, enabling more effective use of limited finite-state RNN memory. Our bespoke chunkwise algorithm achieves high hardware efficiency through a specialized variant of the Diagonal-Plus-Low-Rank (DPLR) transition matrices, which substantially reduces computation compared to the general DPLR formulation while remaining more consistent with the classical delta rule. We pretrain a Kimi Linear model with 3B activated parameters and 48B total parameters, based on a layerwise hybrid of KDA and Multi-Head Latent Attention (MLA). Our experiments show that with an identical training recipe, Kimi Linear outperforms full MLA with a sizeable margin across all evaluated tasks, while reducing KV cache usage by up to 75% and achieving up to 6 times decoding throughput for a 1M context. These results demonstrate that Kimi Linear can be a drop-in replacement for full attention architectures with superior performance and efficiency, including tasks with longer input and output lengths. To support further research, we open-source the KDA kernel and vLLM implementations, and release the pre-trained and instruction-tuned model checkpoints.
Ponimator: Unfolding Interactive Pose for Versatile Human-human Interaction Animation
Oct 16, 2025Close-proximity human-human interactive poses convey rich contextual information about interaction dynamics. Given such poses, humans can intuitively infer the context and anticipate possible past and future dynamics, drawing on strong priors of human behavior. Inspired by this observation, we propose Ponimator, a simple framework anchored on proximal interactive poses for versatile interaction animation. Our training data consists of close-contact two-person poses and their surrounding temporal context from motion-capture interaction datasets. Leveraging interactive pose priors, Ponimator employs two conditional diffusion models: (1) a pose animator that uses the temporal prior to generate dynamic motion sequences from interactive poses, and (2) a pose generator that applies the spatial prior to synthesize interactive poses from a single pose, text, or both when interactive poses are unavailable. Collectively, Ponimator supports diverse tasks, including image-based interaction animation, reaction animation, and text-to-interaction synthesis, facilitating the transfer of interaction knowledge from high-quality mocap data to open-world scenarios. Empirical experiments across diverse datasets and applications demonstrate the universality of the pose prior and the effectiveness and robustness of our framework.
Kimi K2: Open Agentic Intelligence
Jul 28, 2025



We introduce Kimi K2, a Mixture-of-Experts (MoE) large language model with 32 billion activated parameters and 1 trillion total parameters. We propose the MuonClip optimizer, which improves upon Muon with a novel QK-clip technique to address training instability while enjoying the advanced token efficiency of Muon. Based on MuonClip, K2 was pre-trained on 15.5 trillion tokens with zero loss spike. During post-training, K2 undergoes a multi-stage post-training process, highlighted by a large-scale agentic data synthesis pipeline and a joint reinforcement learning (RL) stage, where the model improves its capabilities through interactions with real and synthetic environments. Kimi K2 achieves state-of-the-art performance among open-source non-thinking models, with strengths in agentic capabilities. Notably, K2 obtains 66.1 on Tau2-Bench, 76.5 on ACEBench (En), 65.8 on SWE-Bench Verified, and 47.3 on SWE-Bench Multilingual -- surpassing most open and closed-sourced baselines in non-thinking settings. It also exhibits strong capabilities in coding, mathematics, and reasoning tasks, with a score of 53.7 on LiveCodeBench v6, 49.5 on AIME 2025, 75.1 on GPQA-Diamond, and 27.1 on OJBench, all without extended thinking. These results position Kimi K2 as one of the most capable open-source large language models to date, particularly in software engineering and agentic tasks. We release our base and post-trained model checkpoints to facilitate future research and applications of agentic intelligence.
Kimi-VL Technical Report
Apr 10, 2025
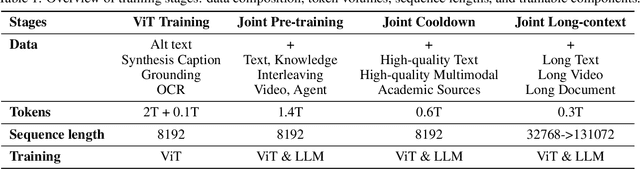
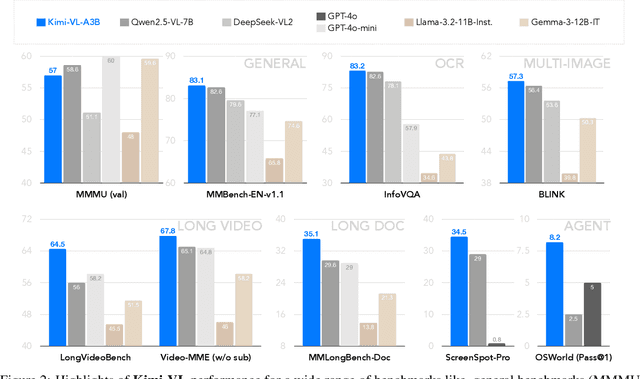

We present Kimi-VL, an efficient open-source Mixture-of-Experts (MoE) vision-language model (VLM) that offers advanced multimodal reasoning, long-context understanding, and strong agent capabilities - all while activating only 2.8B parameters in its language decoder (Kimi-VL-A3B). Kimi-VL demonstrates strong performance across challenging domains: as a general-purpose VLM, Kimi-VL excels in multi-turn agent tasks (e.g., OSWorld), matching flagship models. Furthermore, it exhibits remarkable capabilities across diverse challenging vision language tasks, including college-level image and video comprehension, OCR, mathematical reasoning, and multi-image understanding. In comparative evaluations, it effectively competes with cutting-edge efficient VLMs such as GPT-4o-mini, Qwen2.5-VL-7B, and Gemma-3-12B-IT, while surpassing GPT-4o in several key domains. Kimi-VL also advances in processing long contexts and perceiving clearly. With a 128K extended context window, Kimi-VL can process diverse long inputs, achieving impressive scores of 64.5 on LongVideoBench and 35.1 on MMLongBench-Doc. Its native-resolution vision encoder, MoonViT, further allows it to see and understand ultra-high-resolution visual inputs, achieving 83.2 on InfoVQA and 34.5 on ScreenSpot-Pro, while maintaining lower computational cost for common tasks. Building upon Kimi-VL, we introduce an advanced long-thinking variant: Kimi-VL-Thinking. Developed through long chain-of-thought (CoT) supervised fine-tuning (SFT) and reinforcement learning (RL), this model exhibits strong long-horizon reasoning capabilities. It achieves scores of 61.7 on MMMU, 36.8 on MathVision, and 71.3 on MathVista while maintaining the compact 2.8B activated LLM parameters, setting a new standard for efficient multimodal thinking models. Code and models are publicly accessible at https://github.com/MoonshotAI/Kimi-VL.
PhysGen3D: Crafting a Miniature Interactive World from a Single Image
Mar 26, 2025Envisioning physically plausible outcomes from a single image requires a deep understanding of the world's dynamics. To address this, we introduce PhysGen3D, a novel framework that transforms a single image into an amodal, camera-centric, interactive 3D scene. By combining advanced image-based geometric and semantic understanding with physics-based simulation, PhysGen3D creates an interactive 3D world from a static image, enabling us to "imagine" and simulate future scenarios based on user input. At its core, PhysGen3D estimates 3D shapes, poses, physical and lighting properties of objects, thereby capturing essential physical attributes that drive realistic object interactions. This framework allows users to specify precise initial conditions, such as object speed or material properties, for enhanced control over generated video outcomes. We evaluate PhysGen3D's performance against closed-source state-of-the-art (SOTA) image-to-video models, including Pika, Kling, and Gen-3, showing PhysGen3D's capacity to generate videos with realistic physics while offering greater flexibility and fine-grained control. Our results show that PhysGen3D achieves a unique balance of photorealism, physical plausibility, and user-driven interactivity, opening new possibilities for generating dynamic, physics-grounded video from an image.
Muon is Scalable for LLM Training
Feb 24, 2025Recently, the Muon optimizer based on matrix orthogonalization has demonstrated strong results in training small-scale language models, but the scalability to larger models has not been proven. We identify two crucial techniques for scaling up Muon: (1) adding weight decay and (2) carefully adjusting the per-parameter update scale. These techniques allow Muon to work out-of-the-box on large-scale training without the need of hyper-parameter tuning. Scaling law experiments indicate that Muon achieves $\sim\!2\times$ computational efficiency compared to AdamW with compute optimal training. Based on these improvements, we introduce Moonlight, a 3B/16B-parameter Mixture-of-Expert (MoE) model trained with 5.7T tokens using Muon. Our model improves the current Pareto frontier, achieving better performance with much fewer training FLOPs compared to prior models. We open-source our distributed Muon implementation that is memory optimal and communication efficient. We also release the pretrained, instruction-tuned, and intermediate checkpoints to support future research.