 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMolmoMotion: Forecasting Point Trajectories in 3D with Language Instruction
Jun 17, 2026Motion forecasting is central to visual intelligence: agents must anticipate how objects will move in order to plan actions, reason about physical interactions, and synthesize realistic futures. We argue that 3D points in world coordinates provide a general representation that is class-agnostic, view-stable, compact, and directly useful for downstream tasks. We formalize the task of goal-conditioned 3D point motion forecasting: given a short visual history, a set of 3D query points on an object of interest, and a language description of the intended goal, the model predicts the future 3D trajectory of each point. We introduce a full stack to study this task at scale: (1) MolmoMotion-1M is a large corpus of action-described, object-grounded 3D point trajectories annotated from 1.16M unconstrained videos; (2) PointMotionBench is a human-verified benchmark spanning 111 object categories and 61 motion types; and (3) MolmoMotion is a general motion forecasting model that supports both autoregressive coordinate prediction and flow-matching-based trajectory generation. MolmoMotion accurately predicts diverse motion patterns with different language instructions, and significantly outperforms existing motion prediction baselines on PointMotionBench. Finally, we show that the learned 3D motion prior transfers well to downstream applications: it improves training efficiency and generalization for robot manipulation, and its predicted trajectories provide effective motion guidance for generative models to synthesize videos with more realistic object motion.
RefDecoder: Enhancing Visual Generation with Conditional Video Decoding
May 14, 2026Video generation powers a vast array of downstream applications. However, while the de facto standard, i.e., latent diffusion models, typically employ heavily conditioned denoising networks, their decoders often remain unconditional. We observe that this architectural asymmetry leads to significant loss of detail and inconsistency relative to the input image. To address this, we argue that the decoder requires equal conditioning to preserve structural integrity. We introduce RefDecoder, a reference-conditioned video VAE decoder by injecting high-fidelity reference image signal directly into the decoding process via reference attention. Specifically, a lightweight image encoder maps the reference frame into the detail-rich high-dimensional tokens, which are co-processed with the denoised video latent tokens at each decoder up-sampling stage. We demonstrate consistent improvements across several distinct decoder backbones (e.g., Wan 2.1 and VideoVAE+), achieving up to +2.1dB PSNR over the unconditional baselines on the Inter4K, WebVid, and Large Motion reconstruction benchmarks. Notably, RefDecoder can be directly swapped into existing video generation systems without additional fine-tuning, and we report across-the-board improvements in subject consistency, background consistency, and overall quality scores on the VBench I2V benchmark. Beyond I2V, RefDecoder generalizes well to a wide range of visual generation tasks such as style transfer and video editing refinement.
MolmoAct2: Action Reasoning Models for Real-world Deployment
May 04, 2026Vision-Language-Action (VLA) models aim to provide a single generalist controller for robots, but today's systems fall short on the criteria that matter for real-world deployment. Frontier models are closed, open-weight alternatives are tied to expensive hardware, reasoning-augmented policies pay prohibitive latency for their grounding, and fine-tuned success rates remain below the threshold for dependable use. We present MolmoAct2, a fully open action reasoning model built for practical deployment, advancing its predecessor along five axes. We introduce MolmoER, a VLM backbone specialized for spatial and embodied reasoning, trained on a 3.3M-sample corpus with a specialize-then-rehearse recipe. We release three new datasets spanning low-to-medium cost platforms, including MolmoAct2-BimanualYAM, 720 hours of teleoperated bimanual trajectories that constitute the largest open bimanual dataset to date, together with quality-filtered Franka (DROID) and SO100/101 subsets. We provide OpenFAST, an open-weight, open-data action tokenizer trained on millions of trajectories across five embodiments. We redesign the architecture to graft a flow-matching continuous-action expert onto a discrete-token VLM via per-layer KV-cache conditioning. Finally, we propose MolmoThink, an adaptive-depth reasoning variant that re-predicts depth tokens only for scene regions that change between timesteps, retaining geometric grounding at a fraction of prior latency. In the most extensive empirical study of any open VLA to date, spanning 7 simulation and real-world benchmarks, MolmoAct2 outperforms strong baselines including Pi-05, while MolmoER surpasses GPT-5 and Gemini Robotics ER-1.5 across 13 embodied-reasoning benchmarks. We release model weights, training code, and complete training data. Project page: https://allenai.org/blog/molmoact2
MolmoWeb: Open Visual Web Agent and Open Data for the Open Web
Apr 09, 2026Web agents--autonomous systems that navigate and execute tasks on the web on behalf of users--have the potential to transform how people interact with the digital world. However, the most capable web agents today rely on proprietary models with undisclosed training data and recipes, limiting scientific understanding, reproducibility, and community-driven progress. We believe agents for the open web should be built in the open. To this end, we introduce (1) MolmoWebMix, a large and diverse mixture of browser task demonstrations and web-GUI perception data and (2) MolmoWeb, a family of fully open multimodal web agents. Specifically, MolmoWebMix combines over 100K synthetic task trajectories from multiple complementary generation pipelines with 30K+ human demonstrations, atomic web-skill trajectories, and GUI perception data, including referring expression grounding and screenshot question answering. MolmoWeb agents operate as instruction-conditioned visual-language action policies: given a task instruction and a webpage screenshot, they predict the next browser action, requiring no access to HTML, accessibility trees, or specialized APIs. Available in 4B and 8B size, on browser-use benchmarks like WebVoyager, Online-Mind2Web, and DeepShop, MolmoWeb agents achieve state-of-the-art results outperforming similar scale open-weight-only models such as Fara-7B, UI-Tars-1.5-7B, and Holo1-7B. MolmoWeb-8B also surpasses set-of-marks (SoM) agents built on much larger closed frontier models like GPT-4o. We further demonstrate consistent gains through test-time scaling via parallel rollouts with best-of-N selection, achieving 94.7% and 60.5% pass@4 (compared to 78.2% and 35.3% pass@1) on WebVoyager and Online-Mind2Web respectively. We will release model checkpoints, training data, code, and a unified evaluation harness to enable reproducibility and accelerate open research on web agents.
WildDet3D: Scaling Promptable 3D Detection in the Wild
Apr 09, 2026Understanding objects in 3D from a single image is a cornerstone of spatial intelligence. A key step toward this goal is monocular 3D object detection--recovering the extent, location, and orientation of objects from an input RGB image. To be practical in the open world, such a detector must generalize beyond closed-set categories, support diverse prompt modalities, and leverage geometric cues when available. Progress is hampered by two bottlenecks: existing methods are designed for a single prompt type and lack a mechanism to incorporate additional geometric cues, and current 3D datasets cover only narrow categories in controlled environments, limiting open-world transfer. In this work we address both gaps. First, we introduce WildDet3D, a unified geometry-aware architecture that natively accepts text, point, and box prompts and can incorporate auxiliary depth signals at inference time. Second, we present WildDet3D-Data, the largest open 3D detection dataset to date, constructed by generating candidate 3D boxes from existing 2D annotations and retaining only human-verified ones, yielding over 1M images across 13.5K categories in diverse real-world scenes. WildDet3D establishes a new state-of-the-art across multiple benchmarks and settings. In the open-world setting, it achieves 22.6/24.8 AP3D on our newly introduced WildDet3D-Bench with text and box prompts. On Omni3D, it reaches 34.2/36.4 AP3D with text and box prompts, respectively. In zero-shot evaluation, it achieves 40.3/48.9 ODS on Argoverse 2 and ScanNet. Notably, incorporating depth cues at inference time yields substantial additional gains (+20.7 AP on average across settings).
TOPReward: Token Probabilities as Hidden Zero-Shot Rewards for Robotics
Feb 22, 2026While Vision-Language-Action (VLA) models have seen rapid progress in pretraining, their advancement in Reinforcement Learning (RL) remains hampered by low sample efficiency and sparse rewards in real-world settings. Developing generalizable process reward models is essential for providing the fine-grained feedback necessary to bridge this gap, yet existing temporal value functions often fail to generalize beyond their training domains. We introduce TOPReward, a novel, probabilistically grounded temporal value function that leverages the latent world knowledge of pretrained video Vision-Language Models (VLMs) to estimate robotic task progress. Unlike prior methods that prompt VLMs to directly output progress values, which are prone to numerical misrepresentation, TOPReward extracts task progress directly from the VLM's internal token logits. In zero-shot evaluations across 130+ distinct real-world tasks and multiple robot platforms (e.g., Franka, YAM, SO-100/101), TOPReward achieves 0.947 mean Value-Order Correlation (VOC) on Qwen3-VL, dramatically outperforming the state-of-the-art GVL baseline which achieves near-zero correlation on the same open-source model. We further demonstrate that TOPReward serves as a versatile tool for downstream applications, including success detection and reward-aligned behavior cloning.
Molmo2: Open Weights and Data for Vision-Language Models with Video Understanding and Grounding
Jan 15, 2026Today's strongest video-language models (VLMs) remain proprietary. The strongest open-weight models either rely on synthetic data from proprietary VLMs, effectively distilling from them, or do not disclose their training data or recipe. As a result, the open-source community lacks the foundations needed to improve on the state-of-the-art video (and image) language models. Crucially, many downstream applications require more than just high-level video understanding; they require grounding -- either by pointing or by tracking in pixels. Even proprietary models lack this capability. We present Molmo2, a new family of VLMs that are state-of-the-art among open-source models and demonstrate exceptional new capabilities in point-driven grounding in single image, multi-image, and video tasks. Our key contribution is a collection of 7 new video datasets and 2 multi-image datasets, including a dataset of highly detailed video captions for pre-training, a free-form video Q&A dataset for fine-tuning, a new object tracking dataset with complex queries, and an innovative new video pointing dataset, all collected without the use of closed VLMs. We also present a training recipe for this data utilizing an efficient packing and message-tree encoding scheme, and show bi-directional attention on vision tokens and a novel token-weight strategy improves performance. Our best-in-class 8B model outperforms others in the class of open weight and data models on short videos, counting, and captioning, and is competitive on long-videos. On video-grounding Molmo2 significantly outperforms existing open-weight models like Qwen3-VL (35.5 vs 29.6 accuracy on video counting) and surpasses proprietary models like Gemini 3 Pro on some tasks (38.4 vs 20.0 F1 on video pointing and 56.2 vs 41.1 J&F on video tracking).
PhysGen: Rigid-Body Physics-Grounded Image-to-Video Generation
Sep 27, 2024We present PhysGen, a novel image-to-video generation method that converts a single image and an input condition (e.g., force and torque applied to an object in the image) to produce a realistic, physically plausible, and temporally consistent video. Our key insight is to integrate model-based physical simulation with a data-driven video generation process, enabling plausible image-space dynamics. At the heart of our system are three core components: (i) an image understanding module that effectively captures the geometry, materials, and physical parameters of the image; (ii) an image-space dynamics simulation model that utilizes rigid-body physics and inferred parameters to simulate realistic behaviors; and (iii) an image-based rendering and refinement module that leverages generative video diffusion to produce realistic video footage featuring the simulated motion. The resulting videos are realistic in both physics and appearance and are even precisely controllable, showcasing superior results over existing data-driven image-to-video generation works through quantitative comparison and comprehensive user study. PhysGen's resulting videos can be used for various downstream applications, such as turning an image into a realistic animation or allowing users to interact with the image and create various dynamics. Project page: https://stevenlsw.github.io/physgen/
Apple Intelligence Foundation Language Models
Jul 29, 2024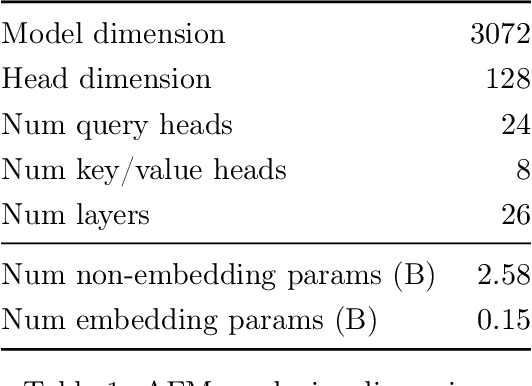
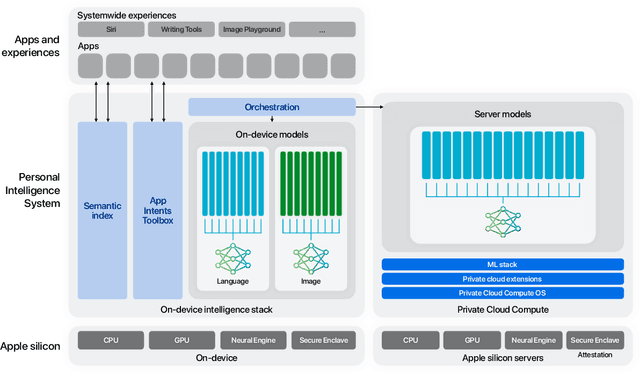

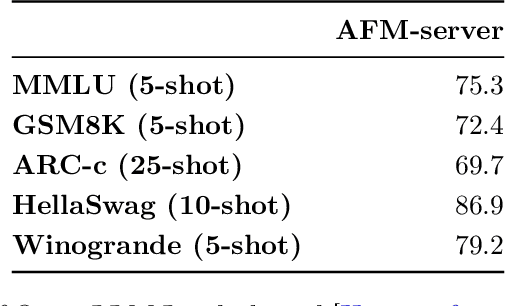
We present foundation language models developed to power Apple Intelligence features, including a ~3 billion parameter model designed to run efficiently on devices and a large server-based language model designed for Private Cloud Compute. These models are designed to perform a wide range of tasks efficiently, accurately, and responsibly. This report describes the model architecture, the data used to train the model, the training process, how the models are optimized for inference, and the evaluation results. We highlight our focus on Responsible AI and how the principles are applied throughout the model development.
NeRFDeformer: NeRF Transformation from a Single View via 3D Scene Flows
Jun 15, 2024We present a method for automatically modifying a NeRF representation based on a single observation of a non-rigid transformed version of the original scene. Our method defines the transformation as a 3D flow, specifically as a weighted linear blending of rigid transformations of 3D anchor points that are defined on the surface of the scene. In order to identify anchor points, we introduce a novel correspondence algorithm that first matches RGB-based pairs, then leverages multi-view information and 3D reprojection to robustly filter false positives in two steps. We also introduce a new dataset for exploring the problem of modifying a NeRF scene through a single observation. Our dataset ( https://github.com/nerfdeformer/nerfdeformer ) contains 113 synthetic scenes leveraging 47 3D assets. We show that our proposed method outperforms NeRF editing methods as well as diffusion-based methods, and we also explore different methods for filtering correspondences.