 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Diffusion Models and 3D Representations: A 3D Consistent Super-Resolution Framework
Aug 06, 2025We propose 3D Super Resolution (3DSR), a novel 3D Gaussian-splatting-based super-resolution framework that leverages off-the-shelf diffusion-based 2D super-resolution models. 3DSR encourages 3D consistency across views via the use of an explicit 3D Gaussian-splatting-based scene representation. This makes the proposed 3DSR different from prior work, such as image upsampling or the use of video super-resolution, which either don't consider 3D consistency or aim to incorporate 3D consistency implicitly. Notably, our method enhances visual quality without additional fine-tuning, ensuring spatial coherence within the reconstructed scene. We evaluate 3DSR on MipNeRF360 and LLFF data, demonstrating that it produces high-resolution results that are visually compelling, while maintaining structural consistency in 3D reconstructions. Code will be released.
CommVQ: Commutative Vector Quantization for KV Cache Compression
Jun 23, 2025Large Language Models (LLMs) are increasingly used in applications requiring long context lengths, but the key-value (KV) cache often becomes a memory bottleneck on GPUs as context grows. To address this, we propose Commutative Vector Quantization (CommVQ) to significantly reduce memory usage for long-context LLM inference. We first introduce additive quantization with a lightweight encoder and codebook to compress the KV cache, which can be decoded via simple matrix multiplication. To further reduce computational costs during decoding, we design the codebook to be commutative with Rotary Position Embedding (RoPE) and train it using an Expectation-Maximization (EM) algorithm. This enables efficient integration of decoding into the self-attention mechanism. Our approach achieves high accuracy with additive quantization and low overhead via the RoPE-commutative codebook. Experiments on long-context benchmarks and GSM8K show that our method reduces FP16 KV cache size by 87.5% with 2-bit quantization, while outperforming state-of-the-art KV cache quantization methods. Notably, it enables 1-bit KV cache quantization with minimal accuracy loss, allowing a LLaMA-3.1 8B model to run with a 128K context length on a single RTX 4090 GPU. The source code is available at: https://github.com/UMass-Embodied-AGI/CommVQ.
Variational Rectified Flow Matching
Feb 13, 2025We study Variational Rectified Flow Matching, a framework that enhances classic rectified flow matching by modeling multi-modal velocity vector-fields. At inference time, classic rectified flow matching 'moves' samples from a source distribution to the target distribution by solving an ordinary differential equation via integration along a velocity vector-field. At training time, the velocity vector-field is learnt by linearly interpolating between coupled samples one drawn from the source and one drawn from the target distribution randomly. This leads to ''ground-truth'' velocity vector-fields that point in different directions at the same location, i.e., the velocity vector-fields are multi-modal/ambiguous. However, since training uses a standard mean-squared-error loss, the learnt velocity vector-field averages ''ground-truth'' directions and isn't multi-modal. In contrast, variational rectified flow matching learns and samples from multi-modal flow directions. We show on synthetic data, MNIST, CIFAR-10, and ImageNet that variational rectified flow matching leads to compelling results.
On Inductive Biases That Enable Generalization of Diffusion Transformers
Oct 28, 2024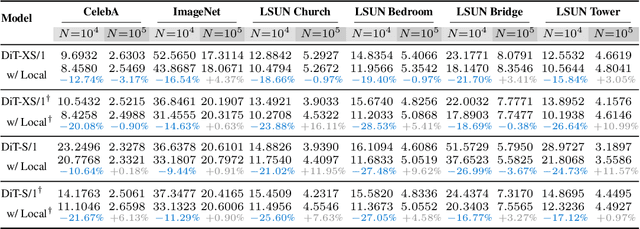
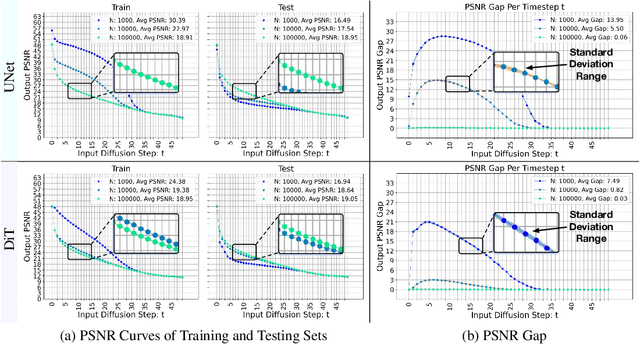
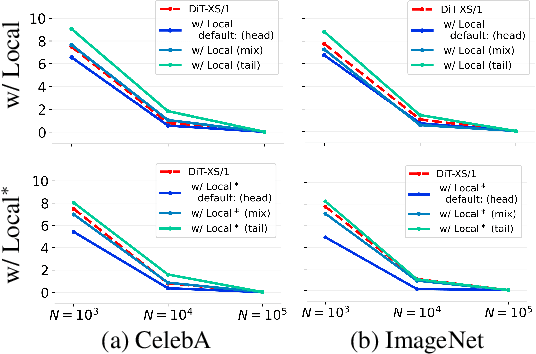
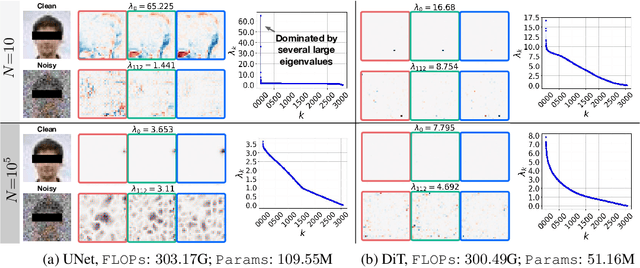
Recent work studying the generalization of diffusion models with UNet-based denoisers reveals inductive biases that can be expressed via geometry-adaptive harmonic bases. However, in practice, more recent denoising networks are often based on transformers, e.g., the diffusion transformer (DiT). This raises the question: do transformer-based denoising networks exhibit inductive biases that can also be expressed via geometry-adaptive harmonic bases? To our surprise, we find that this is not the case. This discrepancy motivates our search for the inductive bias that can lead to good generalization in DiT models. Investigating the pivotal attention modules of a DiT, we find that locality of attention maps are closely associated with generalization. To verify this finding, we modify the generalization of a DiT by restricting its attention windows. We inject local attention windows to a DiT and observe an improvement in generalization. Furthermore, we empirically find that both the placement and the effective attention size of these local attention windows are crucial factors. Experimental results on the CelebA, ImageNet, and LSUN datasets show that strengthening the inductive bias of a DiT can improve both generalization and generation quality when less training data is available. Source code will be released publicly upon paper publication. Project page: dit-generalization.github.io/.
StableDreamer: Taming Noisy Score Distillation Sampling for Text-to-3D
Dec 02, 2023



In the realm of text-to-3D generation, utilizing 2D diffusion models through score distillation sampling (SDS) frequently leads to issues such as blurred appearances and multi-faced geometry, primarily due to the intrinsically noisy nature of the SDS loss. Our analysis identifies the core of these challenges as the interaction among noise levels in the 2D diffusion process, the architecture of the diffusion network, and the 3D model representation. To overcome these limitations, we present StableDreamer, a methodology incorporating three advances. First, inspired by InstructNeRF2NeRF, we formalize the equivalence of the SDS generative prior and a simple supervised L2 reconstruction loss. This finding provides a novel tool to debug SDS, which we use to show the impact of time-annealing noise levels on reducing multi-faced geometries. Second, our analysis shows that while image-space diffusion contributes to geometric precision, latent-space diffusion is crucial for vivid color rendition. Based on this observation, StableDreamer introduces a two-stage training strategy that effectively combines these aspects, resulting in high-fidelity 3D models. Third, we adopt an anisotropic 3D Gaussians representation, replacing Neural Radiance Fields (NeRFs), to enhance the overall quality, reduce memory usage during training, and accelerate rendering speeds, and better capture semi-transparent objects. StableDreamer reduces multi-face geometries, generates fine details, and converges stably.
CVRecon: Rethinking 3D Geometric Feature Learning For Neural Reconstruction
Apr 28, 2023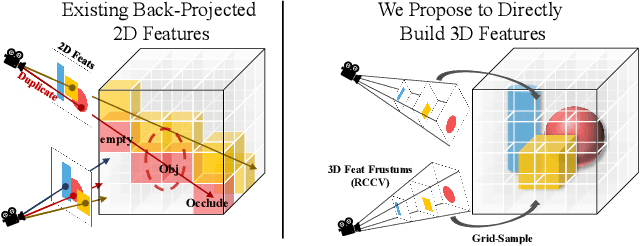



Recent advances in neural reconstruction using posed image sequences have made remarkable progress. However, due to the lack of depth information, existing volumetric-based techniques simply duplicate 2D image features of the object surface along the entire camera ray. We contend this duplication introduces noise in empty and occluded spaces, posing challenges for producing high-quality 3D geometry. Drawing inspiration from traditional multi-view stereo methods, we propose an end-to-end 3D neural reconstruction framework CVRecon, designed to exploit the rich geometric embedding in the cost volumes to facilitate 3D geometric feature learning. Furthermore, we present Ray-contextual Compensated Cost Volume (RCCV), a novel 3D geometric feature representation that encodes view-dependent information with improved integrity and robustness. Through comprehensive experiments, we demonstrate that our approach significantly improves the reconstruction quality in various metrics and recovers clear fine details of the 3D geometries. Our extensive ablation studies provide insights into the development of effective 3D geometric feature learning schemes. Project page: https://cvrecon.ziyue.cool/
GAUDI: A Neural Architect for Immersive 3D Scene Generation
Jul 27, 2022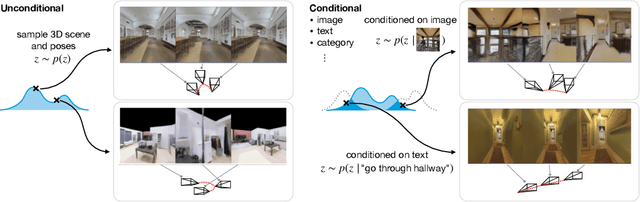
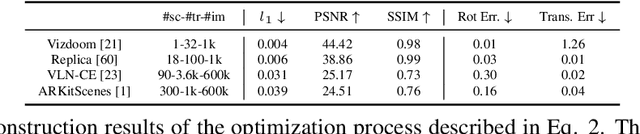
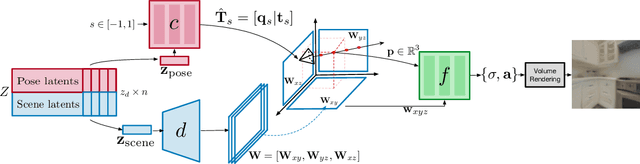

We introduce GAUDI, a generative model capable of capturing the distribution of complex and realistic 3D scenes that can be rendered immersively from a moving camera. We tackle this challenging problem with a scalable yet powerful approach, where we first optimize a latent representation that disentangles radiance fields and camera poses. This latent representation is then used to learn a generative model that enables both unconditional and conditional generation of 3D scenes. Our model generalizes previous works that focus on single objects by removing the assumption that the camera pose distribution can be shared across samples. We show that GAUDI obtains state-of-the-art performance in the unconditional generative setting across multiple datasets and allows for conditional generation of 3D scenes given conditioning variables like sparse image observations or text that describes the scene.
Fast and Explicit Neural View Synthesis
Jul 12, 2021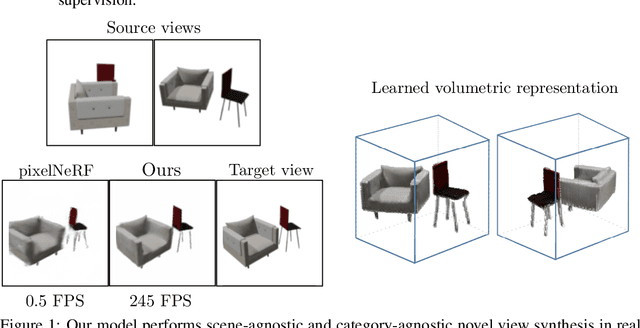
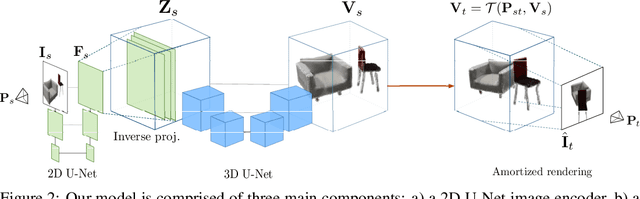
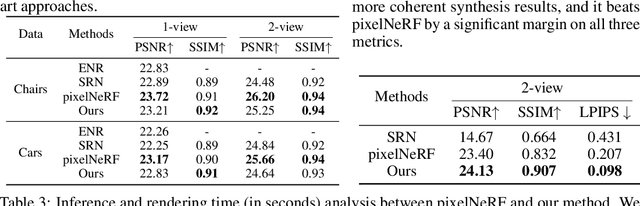
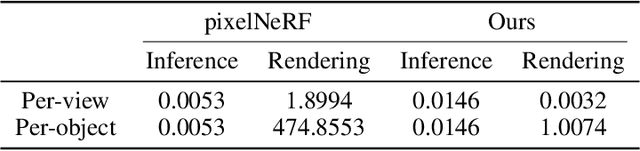
We study the problem of novel view synthesis of a scene comprised of 3D objects. We propose a simple yet effective approach that is neither continuous nor implicit, challenging recent trends on view synthesis. We demonstrate that although continuous radiance field representations have gained a lot of attention due to their expressive power, our simple approach obtains comparable or even better novel view reconstruction quality comparing with state-of-the-art baselines while increasing rendering speed by over 400x. Our model is trained in a category-agnostic manner and does not require scene-specific optimization. Therefore, it is able to generalize novel view synthesis to object categories not seen during training. In addition, we show that with our simple formulation, we can use view synthesis as a self-supervision signal for efficient learning of 3D geometry without explicit 3D supervision.
MetricOpt: Learning to Optimize Black-Box Evaluation Metrics
Apr 21, 2021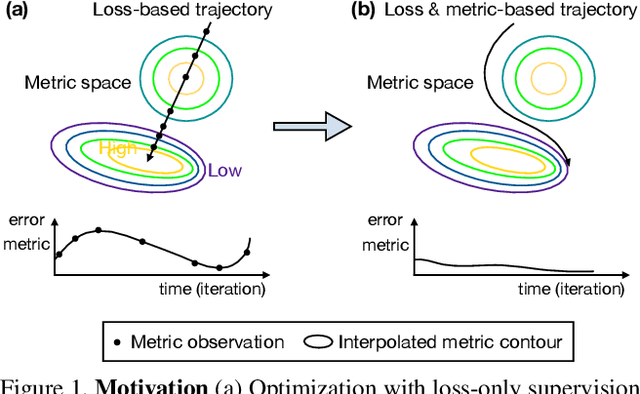
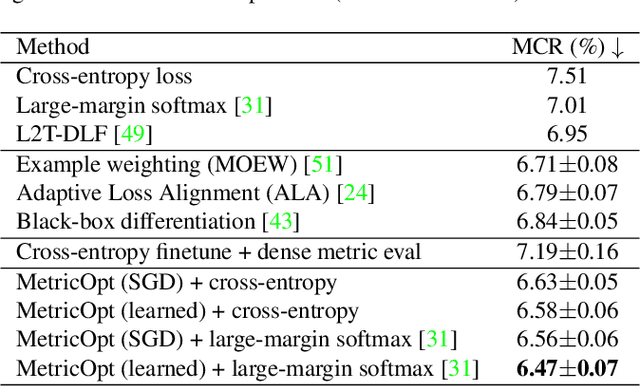

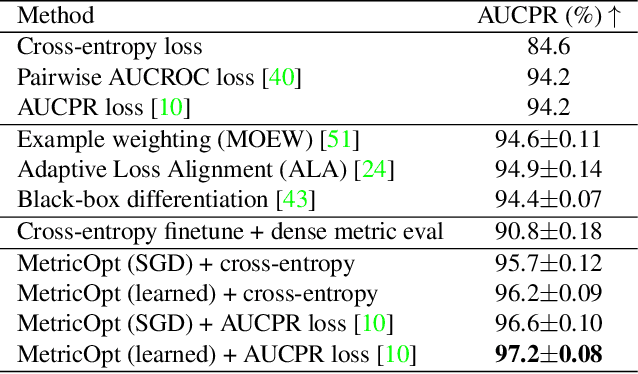
We study the problem of directly optimizing arbitrary non-differentiable task evaluation metrics such as misclassification rate and recall. Our method, named MetricOpt, operates in a black-box setting where the computational details of the target metric are unknown. We achieve this by learning a differentiable value function, which maps compact task-specific model parameters to metric observations. The learned value function is easily pluggable into existing optimizers like SGD and Adam, and is effective for rapidly finetuning a pre-trained model. This leads to consistent improvements since the value function provides effective metric supervision during finetuning, and helps to correct the potential bias of loss-only supervision. MetricOpt achieves state-of-the-art performance on a variety of metrics for (image) classification, image retrieval and object detection. Solid benefits are found over competing methods, which often involve complex loss design or adaptation. MetricOpt also generalizes well to new tasks and model architectures.
Learning to Branch for Multi-Task Learning
Jun 09, 2020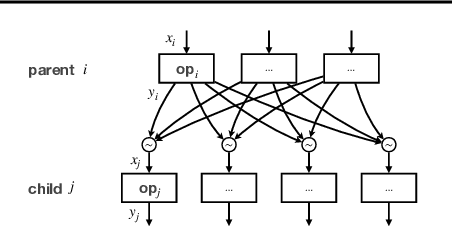
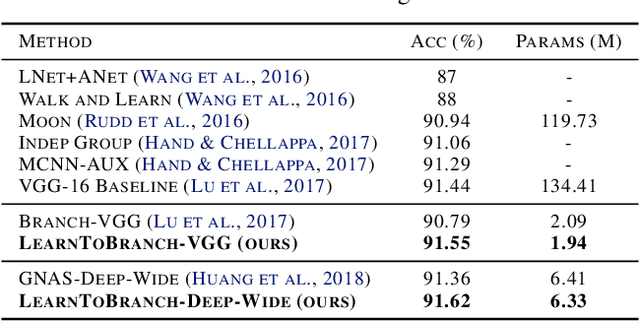

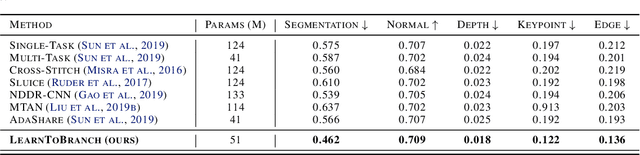
Training multiple tasks jointly in one deep network yields reduced latency during inference and better performance over the single-task counterpart by sharing certain layers of a network. However, over-sharing a network could erroneously enforce over-generalization, causing negative knowledge transfer across tasks. Prior works rely on human intuition or pre-computed task relatedness scores for ad hoc branching structures. They provide sub-optimal end results and often require huge efforts for the trial-and-error process. In this work, we present an automated multi-task learning algorithm that learns where to share or branch within a network, designing an effective network topology that is directly optimized for multiple objectives across tasks. Specifically, we propose a novel tree-structured design space that casts a tree branching operation as a gumbel-softmax sampling procedure. This enables differentiable network splitting that is end-to-end trainable. We validate the proposed method on controlled synthetic data, CelebA, and Taskonomy.