 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFailure-Aware RL: Reliable Offline-to-Online Reinforcement Learning with Self-Recovery for Real-World Manipulation
Jan 12, 2026Post-training algorithms based on deep reinforcement learning can push the limits of robotic models for specific objectives, such as generalizability, accuracy, and robustness. However, Intervention-requiring Failures (IR Failures) (e.g., a robot spilling water or breaking fragile glass) during real-world exploration happen inevitably, hindering the practical deployment of such a paradigm. To tackle this, we introduce Failure-Aware Offline-to-Online Reinforcement Learning (FARL), a new paradigm minimizing failures during real-world reinforcement learning. We create FailureBench, a benchmark that incorporates common failure scenarios requiring human intervention, and propose an algorithm that integrates a world-model-based safety critic and a recovery policy trained offline to prevent failures during online exploration. Extensive simulation and real-world experiments demonstrate the effectiveness of FARL in significantly reducing IR Failures while improving performance and generalization during online reinforcement learning post-training. FARL reduces IR Failures by 73.1% while elevating performance by 11.3% on average during real-world RL post-training. Videos and code are available at https://failure-aware-rl.github.io.
KungfuBot: Physics-Based Humanoid Whole-Body Control for Learning Highly-Dynamic Skills
Jun 15, 2025Humanoid robots are promising to acquire various skills by imitating human behaviors. However, existing algorithms are only capable of tracking smooth, low-speed human motions, even with delicate reward and curriculum design. This paper presents a physics-based humanoid control framework, aiming to master highly-dynamic human behaviors such as Kungfu and dancing through multi-steps motion processing and adaptive motion tracking. For motion processing, we design a pipeline to extract, filter out, correct, and retarget motions, while ensuring compliance with physical constraints to the maximum extent. For motion imitation, we formulate a bi-level optimization problem to dynamically adjust the tracking accuracy tolerance based on the current tracking error, creating an adaptive curriculum mechanism. We further construct an asymmetric actor-critic framework for policy training. In experiments, we train whole-body control policies to imitate a set of highly-dynamic motions. Our method achieves significantly lower tracking errors than existing approaches and is successfully deployed on the Unitree G1 robot, demonstrating stable and expressive behaviors. The project page is https://kungfu-bot.github.io.
Robots Pre-train Robots: Manipulation-Centric Robotic Representation from Large-Scale Robot Dataset
Oct 29, 2024The pre-training of visual representations has enhanced the efficiency of robot learning. Due to the lack of large-scale in-domain robotic datasets, prior works utilize in-the-wild human videos to pre-train robotic visual representation. Despite their promising results, representations from human videos are inevitably subject to distribution shifts and lack the dynamics information crucial for task completion. We first evaluate various pre-trained representations in terms of their correlation to the downstream robotic manipulation tasks (i.e., manipulation centricity). Interestingly, we find that the "manipulation centricity" is a strong indicator of success rates when applied to downstream tasks. Drawing from these findings, we propose Manipulation Centric Representation (MCR), a foundation representation learning framework capturing both visual features and the dynamics information such as actions and proprioceptions of manipulation tasks to improve manipulation centricity. Specifically, we pre-train a visual encoder on the DROID robotic dataset and leverage motion-relevant data such as robot proprioceptive states and actions. We introduce a novel contrastive loss that aligns visual observations with the robot's proprioceptive state-action dynamics, combined with a behavior cloning (BC)-like actor loss to predict actions during pre-training, along with a time contrastive loss. Empirical results across 4 simulation domains with 20 tasks verify that MCR outperforms the strongest baseline method by 14.8%. Moreover, MCR boosts the performance of data-efficient learning with a UR5e arm on 3 real-world tasks by 76.9%. Project website: https://robots-pretrain-robots.github.io/.
RAGChecker: A Fine-grained Framework for Diagnosing Retrieval-Augmented Generation
Aug 15, 2024



Despite Retrieval-Augmented Generation (RAG) has shown promising capability in leveraging external knowledge, a comprehensive evaluation of RAG systems is still challenging due to the modular nature of RAG, evaluation of long-form responses and reliability of measurements. In this paper, we propose a fine-grained evaluation framework, RAGChecker, that incorporates a suite of diagnostic metrics for both the retrieval and generation modules. Meta evaluation verifies that RAGChecker has significantly better correlations with human judgments than other evaluation metrics. Using RAGChecker, we evaluate 8 RAG systems and conduct an in-depth analysis of their performance, revealing insightful patterns and trade-offs in the design choices of RAG architectures. The metrics of RAGChecker can guide researchers and practitioners in developing more effective RAG systems.
UniFolding: Towards Sample-efficient, Scalable, and Generalizable Robotic Garment Folding
Nov 02, 2023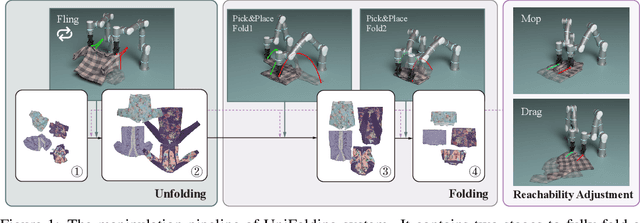
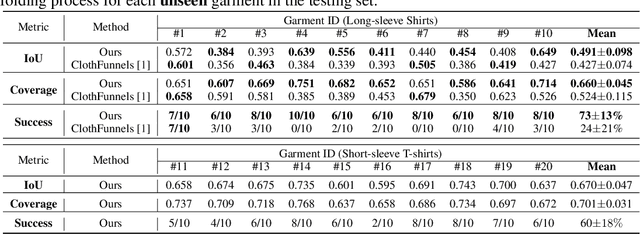
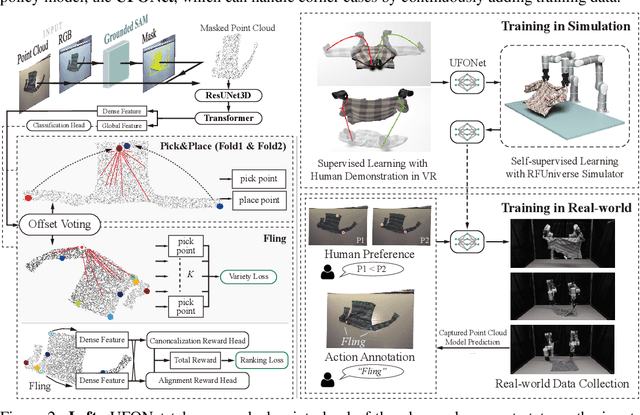
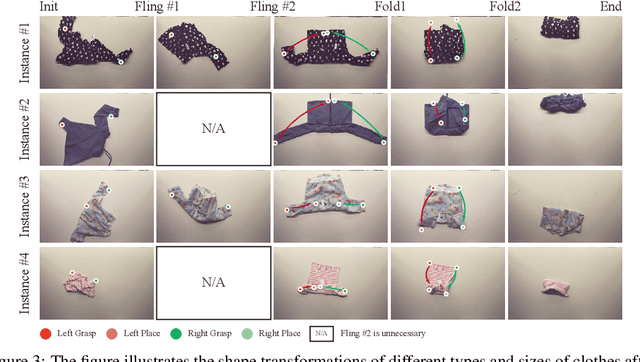
This paper explores the development of UniFolding, a sample-efficient, scalable, and generalizable robotic system for unfolding and folding various garments. UniFolding employs the proposed UFONet neural network to integrate unfolding and folding decisions into a single policy model that is adaptable to different garment types and states. The design of UniFolding is based on a garment's partial point cloud, which aids in generalization and reduces sensitivity to variations in texture and shape. The training pipeline prioritizes low-cost, sample-efficient data collection. Training data is collected via a human-centric process with offline and online stages. The offline stage involves human unfolding and folding actions via Virtual Reality, while the online stage utilizes human-in-the-loop learning to fine-tune the model in a real-world setting. The system is tested on two garment types: long-sleeve and short-sleeve shirts. Performance is evaluated on 20 shirts with significant variations in textures, shapes, and materials. More experiments and videos can be found in the supplementary materials and on the website: https://unifolding.robotflow.ai
Efficient selective attention LSTM for well log curve synthesis
Jul 17, 2023Non-core drilling has gradually become the primary exploration method in geological engineering, and well logging curves have increasingly gained importance as the main carriers of geological information. However, factors such as geological environment, logging equipment, borehole quality, and unexpected events can all impact the quality of well logging curves. Previous methods of re-logging or manual corrections have been associated with high costs and low efficiency. This paper proposes a machine learning method that utilizes existing data to predict missing well logging curves, and its effectiveness and feasibility have been validated through experiments. The proposed method builds upon the traditional Long Short-Term Memory (LSTM) neural network by incorporating a self-attention mechanism to analyze the spatial dependencies of the data. It selectively includes the dominant computational results in the LSTM, reducing the computational complexity from O(n^2) to O(nlogn) and improving model efficiency. Experimental results demonstrate that the proposed method achieves higher accuracy compared to traditional curve synthesis methods based on Fully Connected Neural Networks (FCNN) and LSTM. This accurate, efficient, and cost-effective prediction method holds practical value in engineering applications.
An Ontology for the Materials Design Domain
Jun 13, 2020
In the materials design domain, much of the data from materials calculations are stored in different heterogeneous databases. Materials databases usually have different data models. Therefore, the users have to face the challenges to find the data from adequate sources and integrate data from multiple sources. Ontologies and ontology-based techniques can address such problems as the formal representation of domain knowledge can make data more available and interoperable among different systems. In this paper, we introduce the Materials Design Ontology (MDO), which defines concepts and relations to cover knowledge in the field of materials design. MDO is designed using domain knowledge in materials science (especially in solid-state physics), and is guided by the data from several databases in the materials design field. We show the application of the MDO to materials data retrieved from well-known materials databases.