 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntersection-free Robot Manipulation with Soft-Rigid Coupled Incremental Potential Contact
Paper and Code
Nov 10, 2023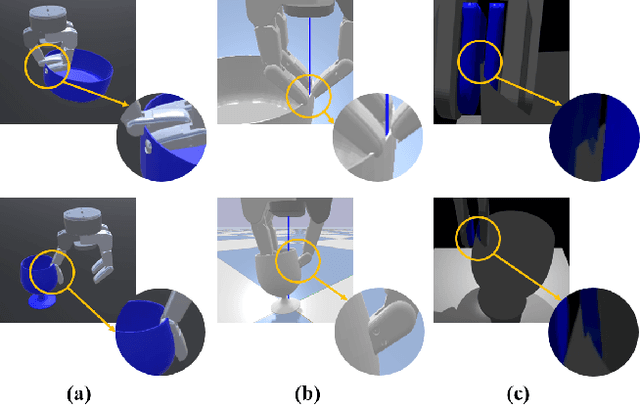
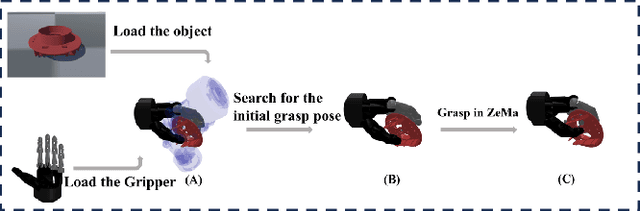
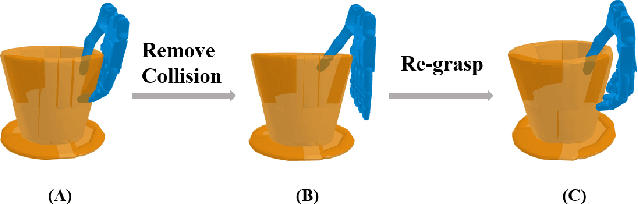
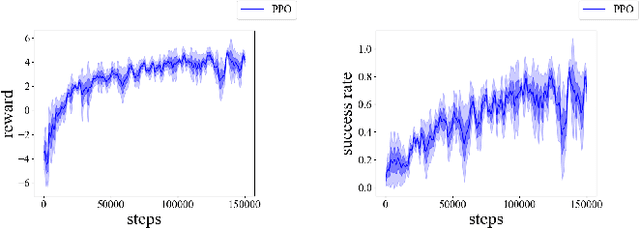
This paper presents a novel simulation platform, ZeMa, designed for robotic manipulation tasks concerning soft objects. Such simulation ideally requires three properties: two-way soft-rigid coupling, intersection-free guarantees, and frictional contact modeling, with acceptable runtime suitable for deep and reinforcement learning tasks. Current simulators often satisfy only a subset of these needs, primarily focusing on distinct rigid-rigid or soft-soft interactions. The proposed ZeMa prioritizes physical accuracy and integrates the incremental potential contact method, offering unified dynamics simulation for both soft and rigid objects. It efficiently manages soft-rigid contact, operating 75x faster than baseline tools with similar methodologies like IPC-GraspSim. To demonstrate its applicability, we employ it for parallel grasp generation, penetrated grasp repair, and reinforcement learning for grasping, successfully transferring the trained RL policy to real-world scenarios.