 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCENIC: Convex Error-controlled Numerical Integration for Contact
Nov 11, 2025State-of-the-art robotics simulators operate in discrete time. This requires users to choose a time step, which is both critical and challenging: large steps can produce non-physical artifacts, while small steps force the simulation to run slowly. Continuous-time error-controlled integration avoids such issues by automatically adjusting the time step to achieve a desired accuracy. But existing error-controlled integrators struggle with the stiff dynamics of contact, and cannot meet the speed and scalability requirements of modern robotics workflows. We introduce CENIC, a new continuous-time integrator that brings together recent advances in convex time-stepping and error-controlled integration, inheriting benefits from both continuous integration and discrete time-stepping. CENIC runs at fast real-time rates comparable to discrete-time robotics simulators like MuJoCo, Drake and Isaac Sim, while also providing guarantees on accuracy and convergence.
Right-Side-Out: Learning Zero-Shot Sim-to-Real Garment Reversal
Sep 19, 2025Turning garments right-side out is a challenging manipulation task: it is highly dynamic, entails rapid contact changes, and is subject to severe visual occlusion. We introduce Right-Side-Out, a zero-shot sim-to-real framework that effectively solves this challenge by exploiting task structures. We decompose the task into Drag/Fling to create and stabilize an access opening, followed by Insert&Pull to invert the garment. Each step uses a depth-inferred, keypoint-parameterized bimanual primitive that sharply reduces the action space while preserving robustness. Efficient data generation is enabled by our custom-built, high-fidelity, GPU-parallel Material Point Method (MPM) simulator that models thin-shell deformation and provides robust and efficient contact handling for batched rollouts. Built on the simulator, our fully automated pipeline scales data generation by randomizing garment geometry, material parameters, and viewpoints, producing depth, masks, and per-primitive keypoint labels without any human annotations. With a single depth camera, policies trained entirely in simulation deploy zero-shot on real hardware, achieving up to 81.3% success rate. By employing task decomposition and high fidelity simulation, our framework enables tackling highly dynamic, severely occluded tasks without laborious human demonstrations.
A Convex Formulation of Material Points and Rigid Bodies with GPU-Accelerated Async-Coupling for Interactive Simulation
Mar 06, 2025



We present a novel convex formulation that weakly couples the Material Point Method (MPM) with rigid body dynamics through frictional contact, optimized for efficient GPU parallelization. Our approach features an asynchronous time-splitting scheme to integrate MPM and rigid body dynamics under different time step sizes. We develop a globally convergent quasi-Newton solver tailored for massive parallelization, achieving up to 500x speedup over previous convex formulations without sacrificing stability. Our method enables interactive-rate simulations of robotic manipulation tasks with diverse deformable objects including granular materials and cloth, with strong convergence guarantees. We detail key implementation strategies to maximize performance and validate our approach through rigorous experiments, demonstrating superior speed, accuracy, and stability compared to state-of-the-art MPM simulators for robotics. We make our method available in the open-source robotics toolkit, Drake.
Embedded IPC: Fast and Intersection-free Simulation in Reduced Subspace for Robot Manipulation
Sep 24, 2024



Physics-based simulation is essential for developing and evaluating robot manipulation policies, particularly in scenarios involving deformable objects and complex contact interactions. However, existing simulators often struggle to balance computational efficiency with numerical accuracy, especially when modeling deformable materials with frictional contact constraints. We introduce an efficient subspace representation for the Incremental Potential Contact (IPC) method, leveraging model reduction to decrease the number of degrees of freedom. Our approach decouples simulation complexity from the resolution of the input model by representing elasticity in a low-resolution subspace while maintaining collision constraints on an embedded high-resolution surface. Our barrier formulation ensures intersection-free trajectories and configurations regardless of material stiffness, time step size, or contact severity. We validate our simulator through quantitative experiments with a soft bubble gripper grasping and qualitative demonstrations of placing a plate on a dish rack. The results demonstrate our simulator's efficiency, physical accuracy, computational stability, and robust handling of frictional contact, making it well-suited for generating demonstration data and evaluating downstream robot training applications.
A Theory of Irrotational Contact Fields
Dec 06, 2023We present a framework that enables to write a family of convex approximations of complex contact models. Within this framework, we show that we can incorporate well established and experimentally validated contact models such as the Hunt & Crossley model. Moreover, we show how to incorporate Coulomb's law and the principle of maximum dissipation using a regularized model of friction. Contrary to common wisdom that favors the use of rigid contact models, our convex formulation is robust and performant even at high stiffness values far beyond that of materials such as steel. Therefore, the same formulation enables the modeling of compliant surfaces such as rubber gripper pads or robot feet as well as hard objects. We characterize and evaluate our approximations in a number of tests cases. We report their properties and highlight limitations. Finally, we demonstrate robust simulation of robotic tasks at interactive rates, with accurately resolved stiction and contact transitions, as required for meaningful sim-to-real transfer. Our method is implemented in the open source robotics toolkit Drake.
Inverse Dynamics Trajectory Optimization for Contact-Implicit Model Predictive Control
Sep 04, 2023Robots must make and break contact to interact with the world and perform useful tasks. However, planning and control through contact remains a formidable challenge. In this work, we achieve real-time contact-implicit model predictive control with a surprisingly simple method: inverse dynamics trajectory optimization. While trajectory optimization with inverse dynamics is not new, we introduce a series of incremental innovations that collectively enable fast model predictive control on a variety of challenging manipulation and locomotion tasks. We implement these innovations in an open-source solver, and present a variety of simulation examples to support the effectiveness of the proposed approach. Additionally, we demonstrate contact-implicit model predictive control on hardware at over 100 Hz for a 20 degree-of-freedom bi-manual manipulation task.
Proximity and Visuotactile Point Cloud Fusion for Contact Patches in Extreme Deformation
Jul 07, 2023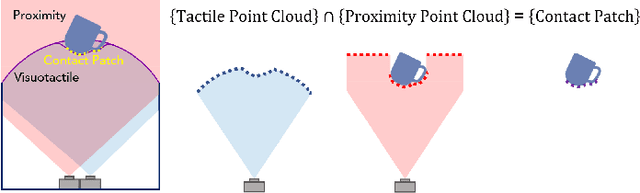
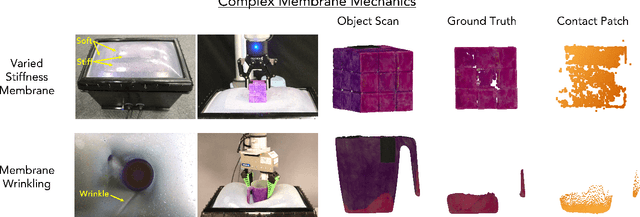
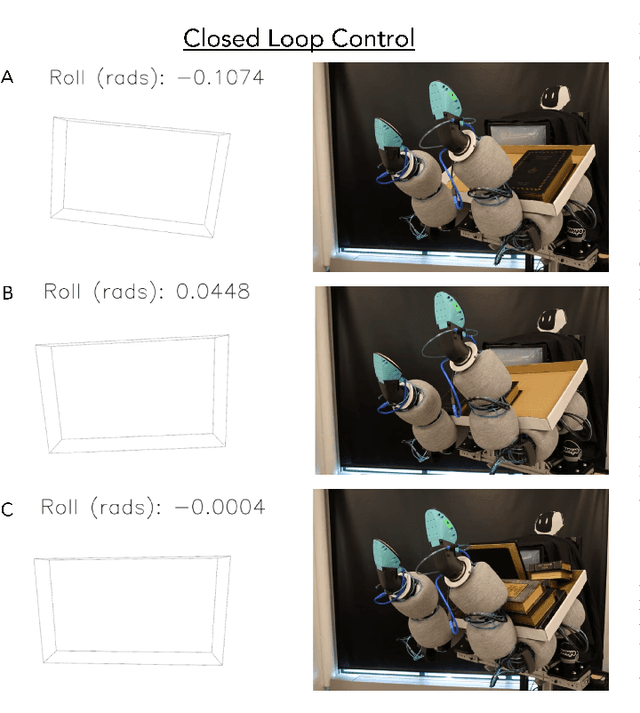
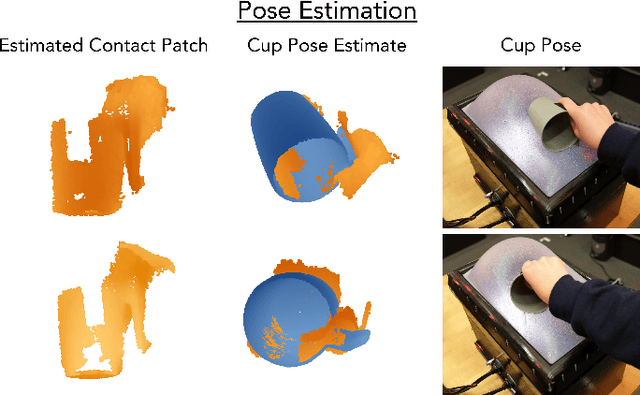
Equipping robots with the sense of touch is critical to emulating the capabilities of humans in real world manipulation tasks. Visuotactile sensors are a popular tactile sensing strategy due to data output compatible with computer vision algorithms and accurate, high resolution estimates of local object geometry. However, these sensors struggle to accommodate high deformations of the sensing surface during object interactions, hindering more informative contact with cm-scale objects frequently encountered in the real world. The soft interfaces of visuotactile sensors are often made of hyperelastic elastomers, which are difficult to simulate quickly and accurately when extremely deformed for tactile information. Additionally, many visuotactile sensors that rely on strict internal light conditions or pattern tracking will fail if the surface is highly deformed. In this work, we propose an algorithm that fuses proximity and visuotactile point clouds for contact patch segmentation that is entirely independent from membrane mechanics. This algorithm exploits the synchronous, high-res proximity and visuotactile modalities enabled by an extremely deformable, selectively transmissive soft membrane, which uses visible light for visuotactile sensing and infrared light for proximity depth. We present the hardware design, membrane fabrication, and evaluation of our contact patch algorithm in low (10%), medium (60%), and high (100%+) membrane strain states. We compare our algorithm against three baselines: proximity-only, tactile-only, and a membrane mechanics model. Our proposed algorithm outperforms all baselines with an average RMSE under 2.8mm of the contact patch geometry across all strain ranges. We demonstrate our contact patch algorithm in four applications: varied stiffness membranes, torque and shear-induced wrinkling, closed loop control for whole body manipulation, and pose estimation.