 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven Explainable Controller for Soft Robots based on Recurrent Neural Networks
Jun 06, 2024The nonlinearity and hysteresis of soft robot motions have posed challenges in accurate soft robot control. Neural networks, especially recurrent neural networks (RNNs), have been widely leveraged for this issue due to their nonlinear activation functions and recurrent structures. Although they have shown satisfying accuracy in most tasks, these black-box approaches are not explainable, and hence, they are unsuitable for areas with high safety requirements, like robot-assisted surgery. Based on the RNN controllers, we propose a data-driven explainable controller (DDEC) whose parameters can be updated online. We discuss the Jacobian controller and kinematics controller in theory and demonstrate that they are only special cases of DDEC. Moreover, we utilize RNN, the Jacobian controller, the kinematics controller, and DDECs for trajectory following tasks. Experimental results have shown that our approach outperforms the other controllers considering trajectory following errors while being explainable. We also conduct a study to explore and explain the functions of each DDEC component. This is the first interpretable soft robot controller that overcomes the shortcomings of both NN controllers and interpretable controllers. Future work may involve proposing different DDECs based on different RNN controllers and exploiting them for high-safety-required applications.
A Novel and Accurate BiLSTM Configuration Controller for Modular Soft Robots with Module Number Adaptability
Jan 19, 2024Modular soft robots have shown higher potential in sophisticated tasks than single-module robots. However, the modular structure incurs the complexity of accurate control and necessitates a control strategy specifically for modular robots. In this paper, we introduce a data collection strategy and a novel and accurate bidirectional LSTM configuration controller for modular soft robots with module number adaptability. Such a controller can control module configurations in robots with different module numbers. Simulation cable-driven robots and real pneumatic robots have been included in experiments to validate the proposed approaches, and we have proven that our controller can be leveraged even with the increase or decrease of module number. This is the first paper that gets inspiration from the physical structure of modular robots and utilizes bidirectional LSTM for module number adaptability. Future work may include a planning method that bridges the task and configuration spaces and the integration of an online controller.
A Hybrid Adaptive Controller for Soft Robot Interchangeability
Jul 20, 2023



Soft robots have been leveraged in considerable areas like surgery, rehabilitation, and bionics due to their softness, flexibility, and safety. However, it is challenging to produce two same soft robots even with the same mold and manufacturing process owing to the complexity of soft materials. Meanwhile, widespread usage of a system requires the ability to fabricate replaceable components, which is interchangeability. Due to the necessity of this property, a hybrid adaptive controller is introduced to achieve interchangeability from the perspective of control approaches. This method utilizes an offline trained recurrent neural network controller to cope with the nonlinear and delayed response from soft robots. Furthermore, an online optimizing kinematics controller is applied to decrease the error caused by the above neural network controller. Soft pneumatic robots with different deformation properties but the same mold have been included for validation experiments. In the experiments, the systems with different actuation configurations and the different robots follow the desired trajectory with errors of 0.040 and 0.030 compared with the working space length, respectively. Such an adaptive controller also shows good performance on different control frequencies and desired velocities. This controller endows soft robots with the potential for wide application, and future work may include different offline and online controllers. A weight parameter adjusting strategy may also be proposed in the future.
Data Models Applied to Soft Robot Modeling and Control: A Review
May 20, 2023Soft robots show compliance and have infinite degrees of freedom. Thanks to these properties, such robots are leveraged for surgery, rehabilitation, biomimetics, unstructured environment exploring, and industrial gripper. In this case, they attract scholars from a variety of areas. However, nonlinearity and hysteresis effects also bring a burden to robot modeling. Moreover, following their flexibility and adaptation, soft robot control is more challenging than rigid robot control. In order to model and control soft robots, a large number of data models are utilized in pairs or separately. This review classifies these applied data models into five kinds, which are the Jacobian model, analytical model, statistical model, neural network, and reinforcement learning, and compares the modeling and controller features, e.g., model dynamics, data requirement, and target task, within and among these categories. A discussion about the development of the existing modeling and control approaches is presented, and we forecast that the combination of offline-trained and online-learning controllers will be the widespread implementation in the future.
Colonoscopy Navigation using End-to-End Deep Visuomotor Control: A User Study
Jun 30, 2022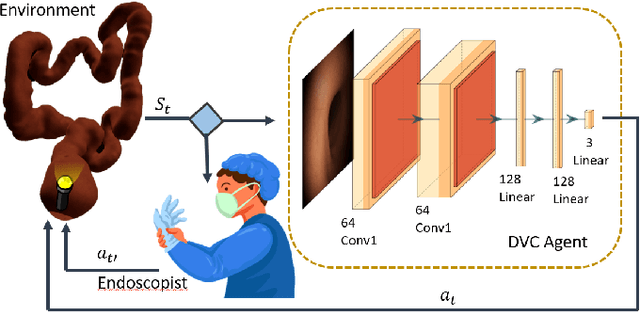
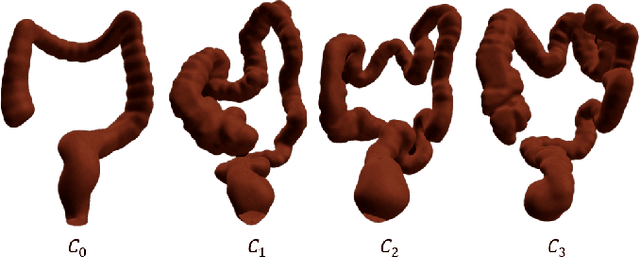
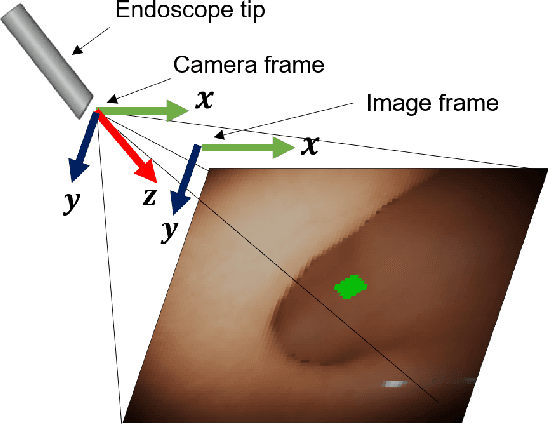
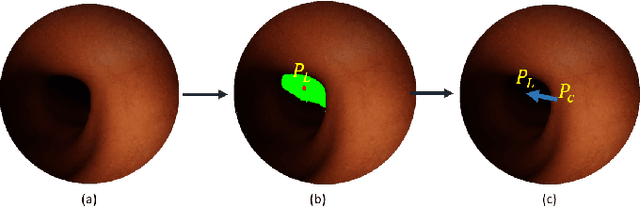
Flexible endoscopes for colonoscopy present several limitations due to their inherent complexity, resulting in patient discomfort and lack of intuitiveness for clinicians. Robotic devices together with autonomous control represent a viable solution to reduce the workload of endoscopists and the training time while improving the overall procedure outcome. Prior works on autonomous endoscope control use heuristic policies that limit their generalisation to the unstructured and highly deformable colon environment and require frequent human intervention. This work proposes an image-based control of the endoscope using Deep Reinforcement Learning, called Deep Visuomotor Control (DVC), to exhibit adaptive behaviour in convoluted sections of the colon tract. DVC learns a mapping between the endoscopic images and the control signal of the endoscope. A first user study of 20 expert gastrointestinal endoscopists was carried out to compare their navigation performance with DVC policies using a realistic virtual simulator. The results indicate that DVC shows equivalent performance on several assessment parameters, being more safer. Moreover, a second user study with 20 novice participants was performed to demonstrate easier human supervision compared to a state-of-the-art heuristic control policy. Seamless supervision of colonoscopy procedures would enable interventionists to focus on the medical decision rather than on the control problem of the endoscope.
Towards a Computed-Aided Diagnosis System in Colonoscopy: Automatic Polyp Segmentation Using Convolution Neural Networks
Jan 15, 2021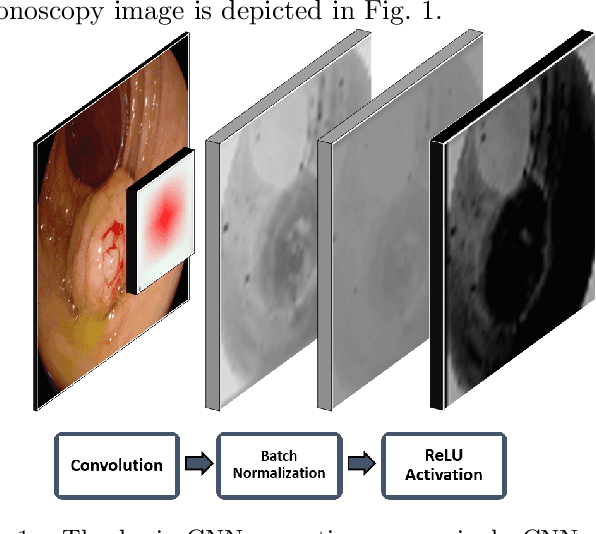
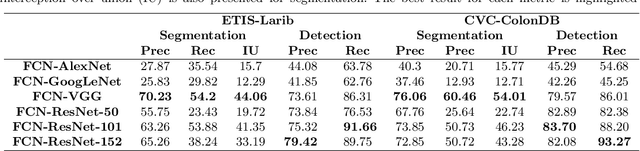
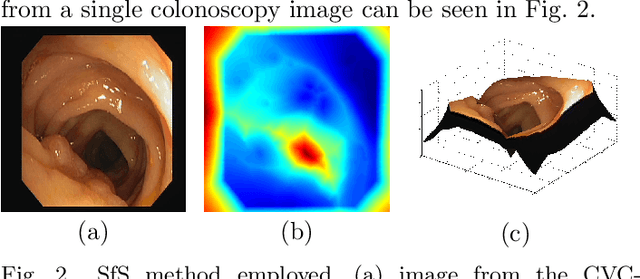

Early diagnosis is essential for the successful treatment of bowel cancers including colorectal cancer (CRC) and capsule endoscopic imaging with robotic actuation can be a valuable diagnostic tool when combined with automated image analysis. We present a deep learning rooted detection and segmentation framework for recognizing lesions in colonoscopy and capsule endoscopy images. We restructure established convolution architectures, such as VGG and ResNets, by converting them into fully-connected convolution networks (FCNs), fine-tune them and study their capabilities for polyp segmentation and detection. We additionally use Shape from-Shading (SfS) to recover depth and provide a richer representation of the tissue's structure in colonoscopy images. Depth is incorporated into our network models as an additional input channel to the RGB information and we demonstrate that the resulting network yields improved performance. Our networks are tested on publicly available datasets and the most accurate segmentation model achieved a mean segmentation IU of 47.78% and 56.95% on the ETIS-Larib and CVC-Colon datasets, respectively. For polyp detection, the top performing models we propose surpass the current state of the art with detection recalls superior to 90% for all datasets tested. To our knowledge, we present the first work to use FCNs for polyp segmentation in addition to proposing a novel combination of SfS and RGB that boosts performance
* 10 pages, 6 figures