 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Drift Compensation for Soft Sensorized Finger Using Continual Learning
Mar 18, 2025



Strain sensors are gaining popularity in soft robotics for acquiring tactile data due to their flexibility and ease of integration. Tactile sensing plays a critical role in soft grippers, enabling them to safely interact with unstructured environments and precisely detect object properties. However, a significant challenge with these systems is their high non-linearity, time-varying behavior, and long-term signal drift. In this paper, we introduce a continual learning (CL) approach to model a soft finger equipped with piezoelectric-based strain sensors for proprioception. To tackle the aforementioned challenges, we propose an adaptive CL algorithm that integrates a Long Short-Term Memory (LSTM) network with a memory buffer for rehearsal and includes a regularization term to keep the model's decision boundary close to the base signal while adapting to time-varying drift. We conduct nine different experiments, resetting the entire setup each time to demonstrate signal drift. We also benchmark our algorithm against two other methods and conduct an ablation study to assess the impact of different components on the overall performance.
Data Models Applied to Soft Robot Modeling and Control: A Review
May 20, 2023Soft robots show compliance and have infinite degrees of freedom. Thanks to these properties, such robots are leveraged for surgery, rehabilitation, biomimetics, unstructured environment exploring, and industrial gripper. In this case, they attract scholars from a variety of areas. However, nonlinearity and hysteresis effects also bring a burden to robot modeling. Moreover, following their flexibility and adaptation, soft robot control is more challenging than rigid robot control. In order to model and control soft robots, a large number of data models are utilized in pairs or separately. This review classifies these applied data models into five kinds, which are the Jacobian model, analytical model, statistical model, neural network, and reinforcement learning, and compares the modeling and controller features, e.g., model dynamics, data requirement, and target task, within and among these categories. A discussion about the development of the existing modeling and control approaches is presented, and we forecast that the combination of offline-trained and online-learning controllers will be the widespread implementation in the future.
A bistable soft gripper with mechanically embedded sensing and actuation for fast closed-loop grasping
Feb 13, 2019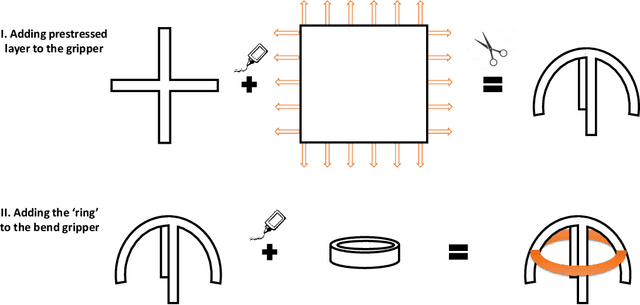
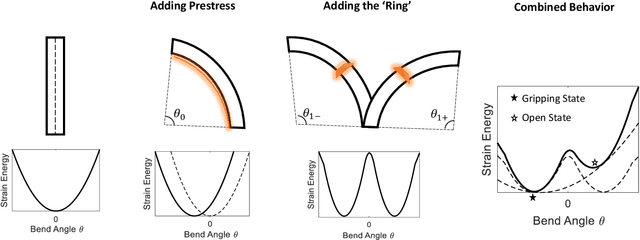
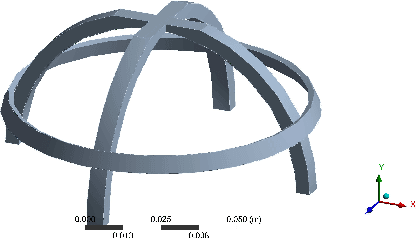
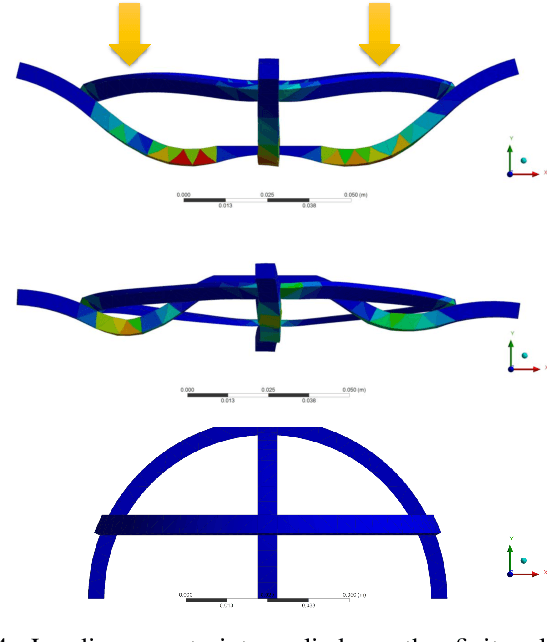
Soft robotic grippers are shown to be high effective for grasping unstructured objects with simple sensing and control strategies. However, they are still limited by their speed, sensing capabilities and actuation mechanism. Hence, their usage have been restricted in highly dynamic grasping tasks. This paper presents a soft robotic gripper with tunable bistable properties for sensor-less dynamic grasping. The bistable mechanism allows us to store arbitrarily large strain energy in the soft system which is then released upon contact. The mechanism also provides flexibility on the type of actuation mechanism as the grasping and sensing phase is completely passive. Theoretical background behind the mechanism is presented with finite element analysis to provide insights into design parameters. Finally, we experimentally demonstrate sensor-less dynamic grasping of an unknown object within 0.02 seconds, including the time to sense and actuate.
Modelling the Nonlinear Response of Fibre-reinforced Bending Fluidic Actuators
May 03, 2016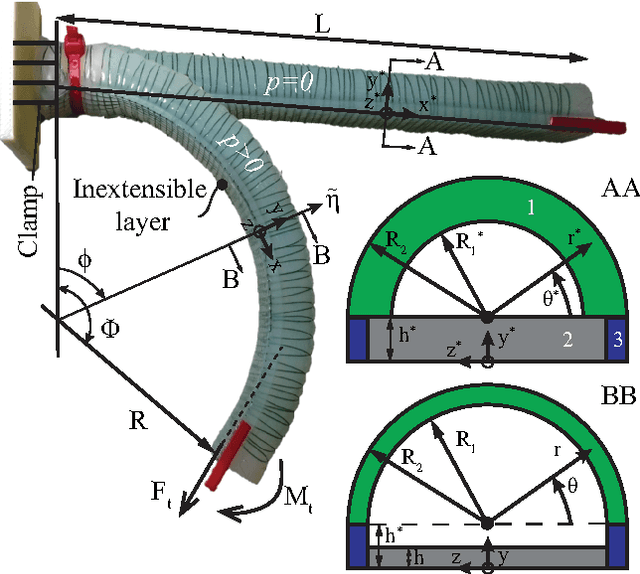

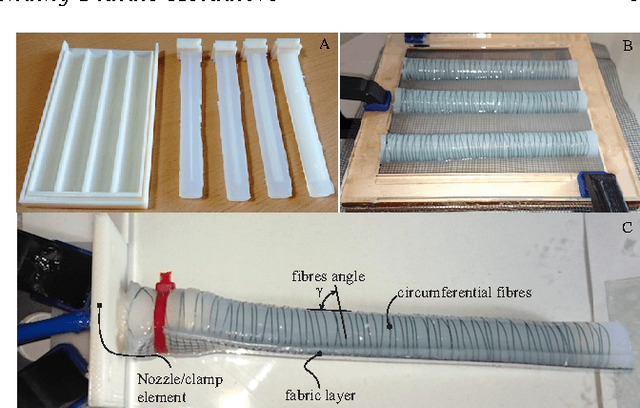
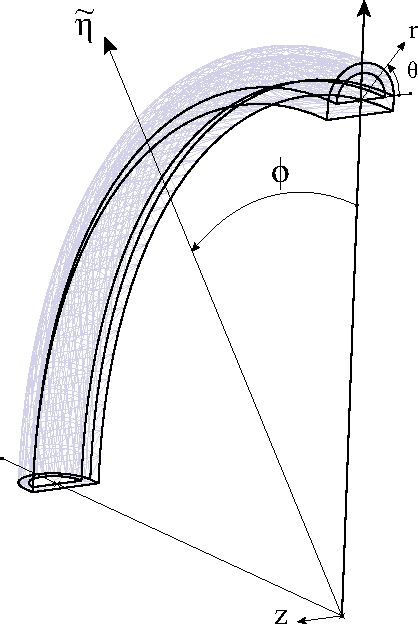
Soft actuators are receiving increasing attention from the engineering community, not only in research but even for industrial applications. Among soft actuators, fibre-reinforced Bending Fluidic Actuators (BFAs) became very popular thanks to features such as robustness and easy design and fabrication. However, an accurate modelling of these smart structures, taking into account all the nonlinearities involved, is a challenging task. In this effort, we propose an analytical mechanical model to capture the quasi-static response of fibre-reinforced BFAs. The model is fully 3D and for the first time includes the effect of the pressure on the lateral surface of the chamber as well as the non-constant torque produced by the pressure at the tip. The presented model can be used for design and control, while providing information about the mechanics of these complex actuators.