 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemRec: Collaborative Memory-Augmented Agentic Recommender System
Jan 13, 2026The evolution of recommender systems has shifted preference storage from rating matrices and dense embeddings to semantic memory in the agentic era. Yet existing agents rely on isolated memory, overlooking crucial collaborative signals. Bridging this gap is hindered by the dual challenges of distilling vast graph contexts without overwhelming reasoning agents with cognitive load, and evolving the collaborative memory efficiently without incurring prohibitive computational costs. To address this, we propose MemRec, a framework that architecturally decouples reasoning from memory management to enable efficient collaborative augmentation. MemRec introduces a dedicated, cost-effective LM_Mem to manage a dynamic collaborative memory graph, serving synthesized, high-signal context to a downstream LLM_Rec. The framework operates via a practical pipeline featuring efficient retrieval and cost-effective asynchronous graph propagation that evolves memory in the background. Extensive experiments on four benchmarks demonstrate that MemRec achieves state-of-the-art performance. Furthermore, architectural analysis confirms its flexibility, establishing a new Pareto frontier that balances reasoning quality, cost, and privacy through support for diverse deployments, including local open-source models. Code:https://github.com/rutgerswiselab/memrec and Homepage: https://memrec.weixinchen.com
Benchmarking Multi-Object Grasping
Mar 25, 2025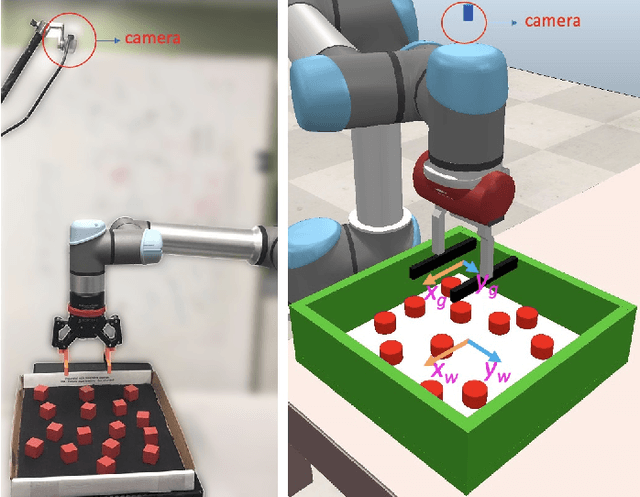
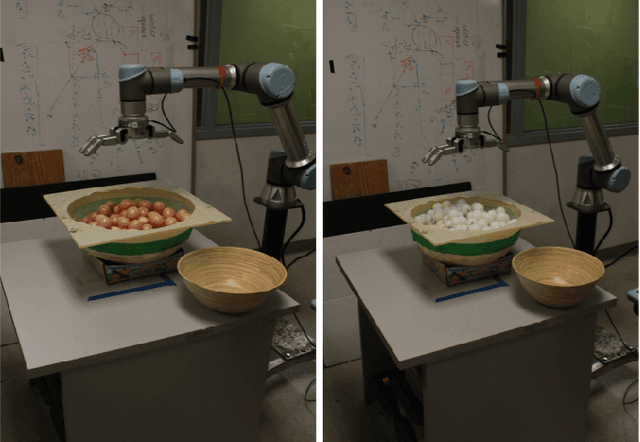
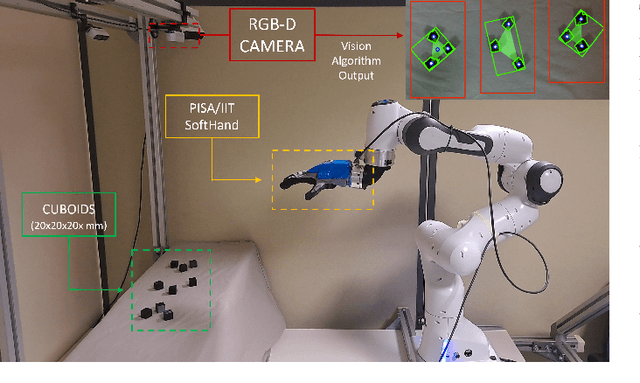
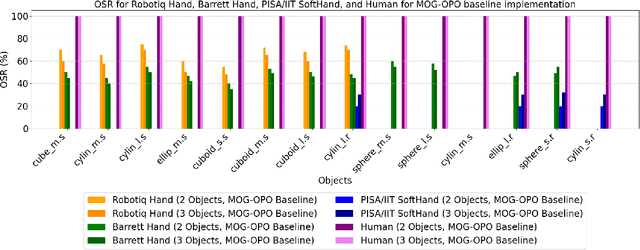
In this work, we describe a multi-object grasping benchmark to evaluate the grasping and manipulation capabilities of robotic systems in both pile and surface scenarios. The benchmark introduces three robot multi-object grasping benchmarking protocols designed to challenge different aspects of robotic manipulation. These protocols are: 1) the Only-Pick-Once protocol, which assesses the robot's ability to efficiently pick multiple objects in a single attempt; 2) the Accurate pick-trnsferring protocol, which evaluates the robot's capacity to selectively grasp and transport a specific number of objects from a cluttered environment; and 3) the Pick-transferring-all protocol, which challenges the robot to clear an entire scene by sequentially grasping and transferring all available objects. These protocols are intended to be adopted by the broader robotics research community, providing a standardized method to assess and compare robotic systems' performance in multi-object grasping tasks. We establish baselines for these protocols using standard planning and perception algorithms on a Barrett hand, Robotiq parallel jar gripper, and the Pisa/IIT Softhand-2, which is a soft underactuated robotic hand. We discuss the results in relation to human performance in similar tasks we well.
Asymptotically-Optimal Multi-Query Path Planning for Moving A Convex Polygon in 2D
Sep 05, 2024



The classical shortest-path roadmaps, also known as reduced visibility graphs, provide a multi-query method for quickly computing optimal paths in two-dimensional environments. Combined with Minkowski sum computations, shortest-path roadmaps can compute optimal paths for a translating robot in 2D. In this study, we explore the intuitive idea of stacking up a set of reduced visibility graphs at different orientations for a convex-shaped holonomic robot, to support the fast computation of near-optimal paths allowing simultaneous 2D translation and rotation. The resulting algorithm, rotation-stacked visibility graph (RVG), is shown to be resolution-complete and asymptotically optimal. RVG out-performs SOTA single-query sampling-based methods including BIT* and AIT* on both computation time and solution optimality fronts.
Toward Holistic Planning and Control Optimization for Dual-Arm Rearrangement
Apr 10, 2024
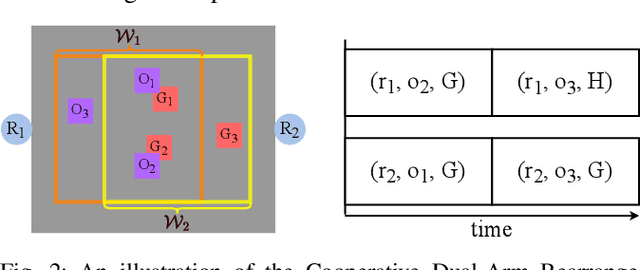
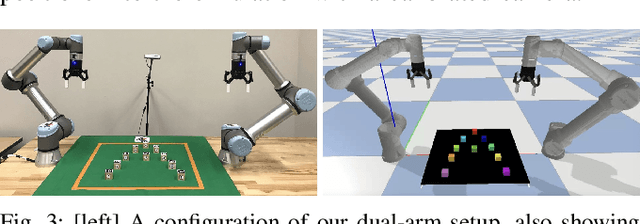
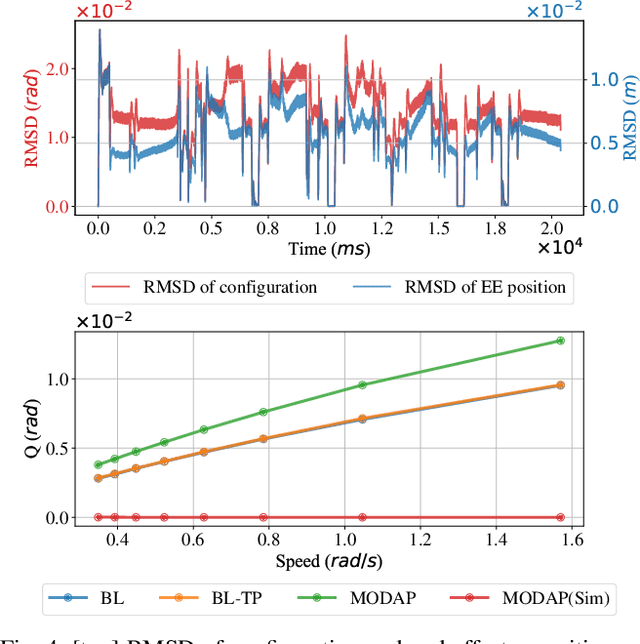
Long-horizon task and motion planning (TAMP) is notoriously difficult to solve, let alone optimally, due to the tight coupling between the interleaved (discrete) task and (continuous) motion planning phases, where each phase on its own is frequently an NP-hard or even PSPACE-hard computational challenge. In this study, we tackle the even more challenging goal of jointly optimizing task and motion plans for a real dual-arm system in which the two arms operate in close vicinity to solve highly constrained tabletop multi-object rearrangement problems. Toward that, we construct a tightly integrated planning and control optimization pipeline, Makespan-Optimized Dual-Arm Planner (MODAP) that combines novel sampling techniques for task planning with state-of-the-art trajectory optimization techniques. Compared to previous state-of-the-art, MODAP produces task and motion plans that better coordinate a dual-arm system, delivering significantly improved execution time improvements while simultaneously ensuring that the resulting time-parameterized trajectory conforms to specified acceleration and jerk limits.
Only Pick Once -- Multi-Object Picking Algorithms for Picking Exact Number of Objects Efficiently
Jul 05, 2023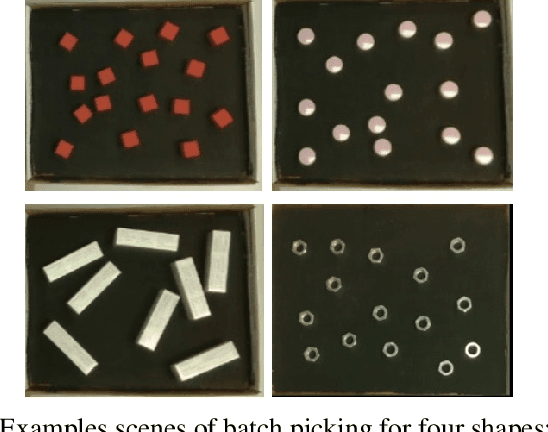
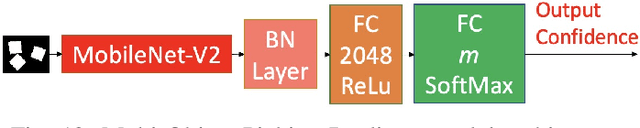
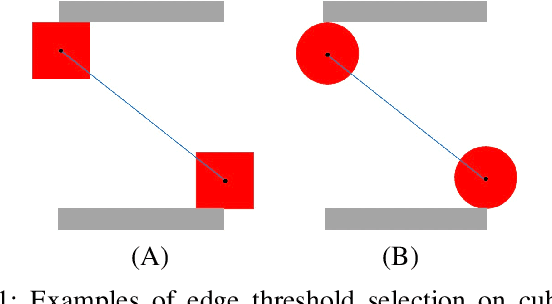
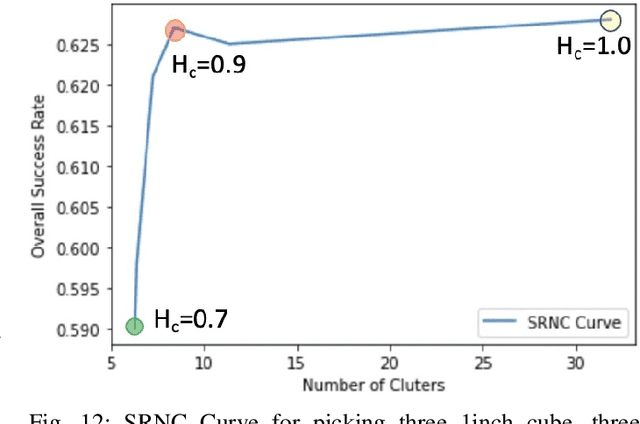
Picking up multiple objects at once is a grasping skill that makes a human worker efficient in many domains. This paper presents a system to pick a requested number of objects by only picking once (OPO). The proposed Only-Pick-Once System (OPOS) contains several graph-based algorithms that convert the layout of objects into a graph, cluster nodes in the graph, rank and select candidate clusters based on their topology. OPOS also has a multi-object picking predictor based on a convolutional neural network for estimating how many objects would be picked up with a given gripper location and orientation. This paper presents four evaluation metrics and three protocols to evaluate the proposed OPOS. The results show OPOS has very high success rates for two and three objects when only picking once. Using OPOS can significantly outperform two to three times single object picking in terms of efficiency. The results also show OPOS can generalize to unseen size and shape objects.