 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Adaptive Feet for Legged Robots: An Open-Source Model for Locomotion Simulation
Dec 04, 2024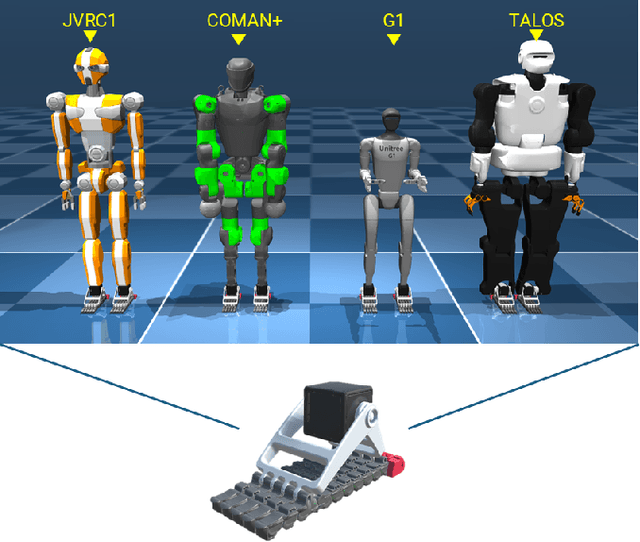
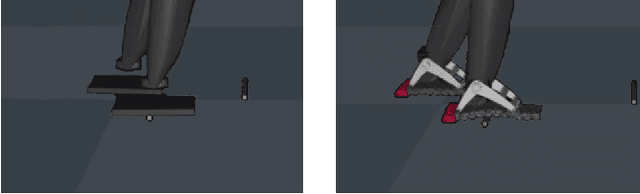
In recent years, artificial feet based on soft robotics and under-actuation principles emerged to improve mobility on challenging terrains. This paper presents the application of the MuJoCo physics engine to realize a digital twin of an adaptive soft foot developed for use with legged robots. We release the MuJoCo soft foot digital twin as open source to allow users and researchers to explore new approaches to locomotion. The work includes the system modeling techniques along with the kinematic and dynamic attributes involved. Validation is conducted through a rigorous comparison with bench tests on a physical prototype, replicating these experiments in simulation. Results are evaluated based on sole deformation and contact forces during foot-obstacle interaction. The foot model is subsequently integrated into simulations of the humanoid robot COMAN+, replacing its original flat feet. Results show an improvement in the robot's ability to negotiate small obstacles without altering its control strategy. Ultimately, this study offers a comprehensive modeling approach for adaptive soft feet, supported by qualitative comparisons of bipedal locomotion with state of the art robotic feet.