 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Adaptive Feet for Legged Robots: An Open-Source Model for Locomotion Simulation
Dec 04, 2024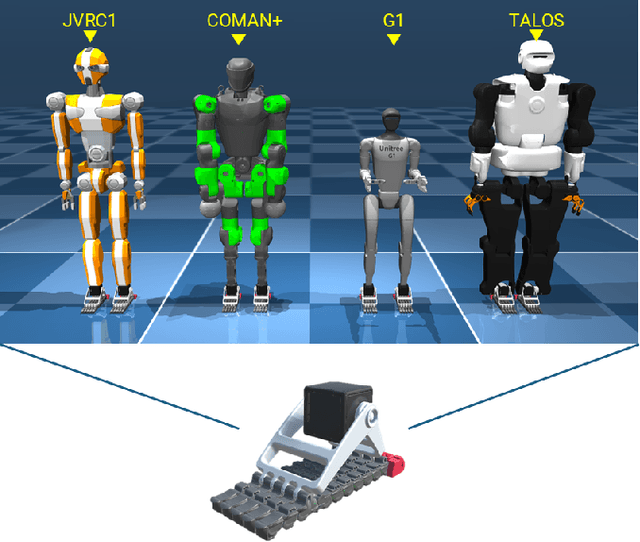
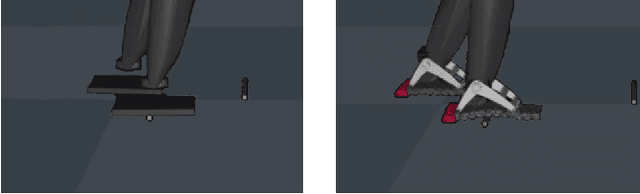
In recent years, artificial feet based on soft robotics and under-actuation principles emerged to improve mobility on challenging terrains. This paper presents the application of the MuJoCo physics engine to realize a digital twin of an adaptive soft foot developed for use with legged robots. We release the MuJoCo soft foot digital twin as open source to allow users and researchers to explore new approaches to locomotion. The work includes the system modeling techniques along with the kinematic and dynamic attributes involved. Validation is conducted through a rigorous comparison with bench tests on a physical prototype, replicating these experiments in simulation. Results are evaluated based on sole deformation and contact forces during foot-obstacle interaction. The foot model is subsequently integrated into simulations of the humanoid robot COMAN+, replacing its original flat feet. Results show an improvement in the robot's ability to negotiate small obstacles without altering its control strategy. Ultimately, this study offers a comprehensive modeling approach for adaptive soft feet, supported by qualitative comparisons of bipedal locomotion with state of the art robotic feet.
Investigating the Performance of Soft Robotic Adaptive Feet with Longitudinal and Transverse Arches
Jan 24, 2024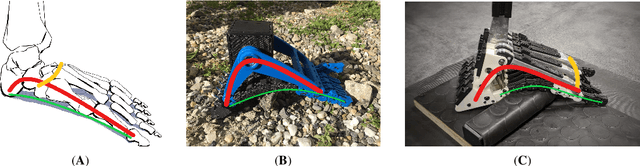
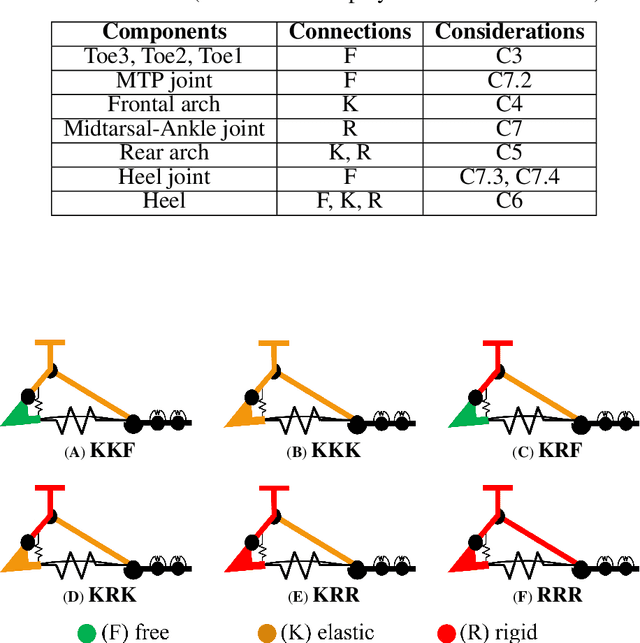
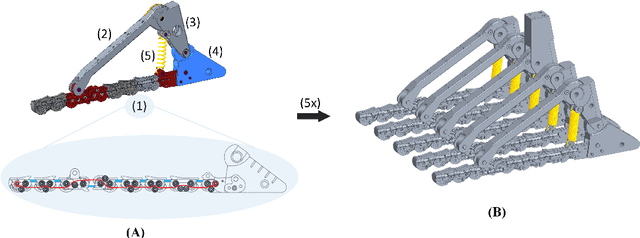
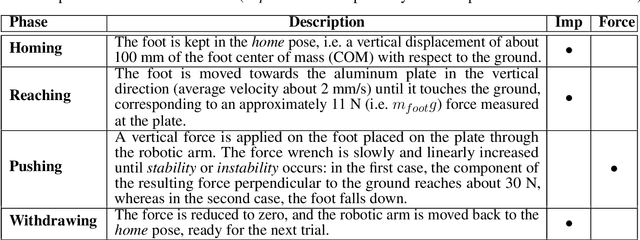
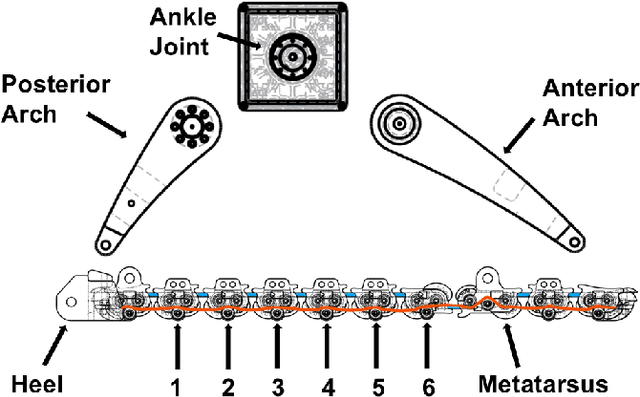
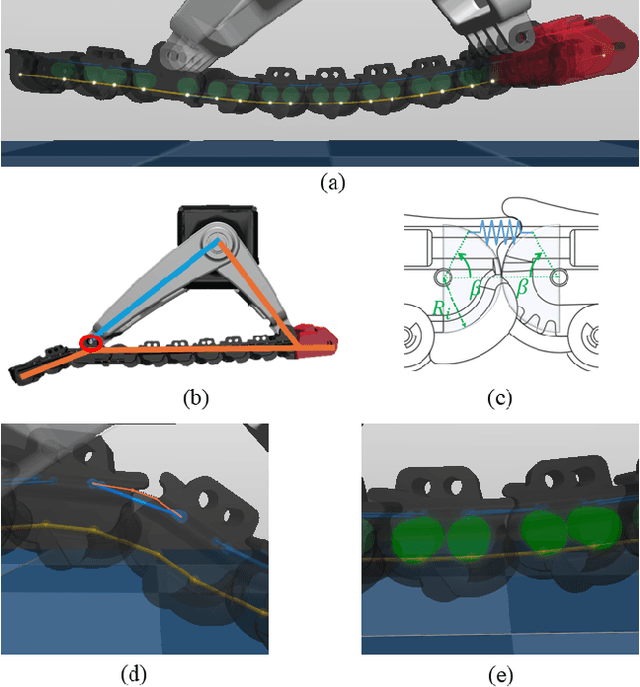
Biped robots usually adopt feet with a rigid structure that simplifies walking on flat grounds and yet hinders ground adaptation in unstructured environments, thus jeopardizing stability. We recently explored in the SoftFoot the idea of adapting a robotic foot to ground irregularities along the sagittal plane. Building on the previous results, we propose in this paper a novel robotic foot able to adapt both in the sagittal and frontal planes, similarly to the human foot. It features five parallel modules with intrinsic longitudinal adaptability that can be combined in many possible designs through optional rigid or elastic connections. By following a methodological design approach, we narrow down the design space to five candidate foot designs and implement them on a modular system. Prototypes are tested experimentally via controlled application of force, through a robotic arm, onto a sensorized plate endowed with different obstacles. Their performance is compared, using also a rigid foot and the previous SoftFoot as a baseline. Analysis of footprint stability shows that the introduction of the transverse arch, by elastically connecting the five parallel modules, is advantageous for obstacle negotiation, especially when obstacles are located under the forefoot. In addition to biped robots' locomotion, this finding might also benefit lower-limb prostheses design.
An Experimental Setup to Test Obstacle-dealing Capabilities of Prosthetic Feet
Dec 18, 2023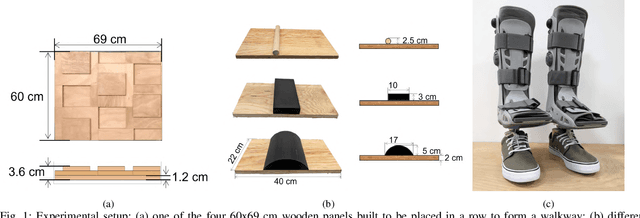
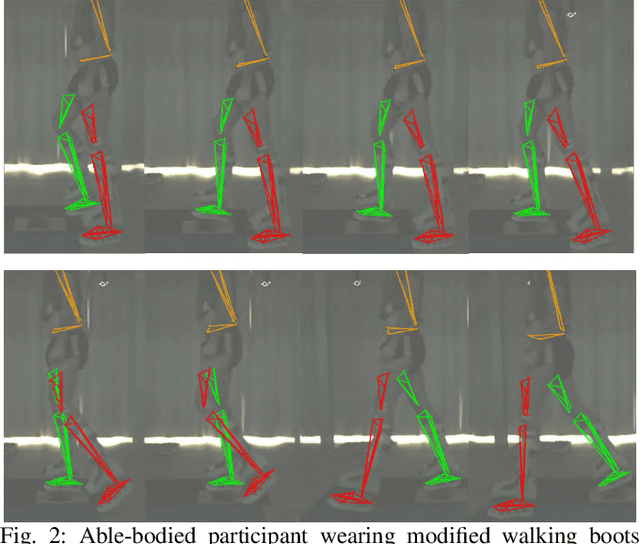
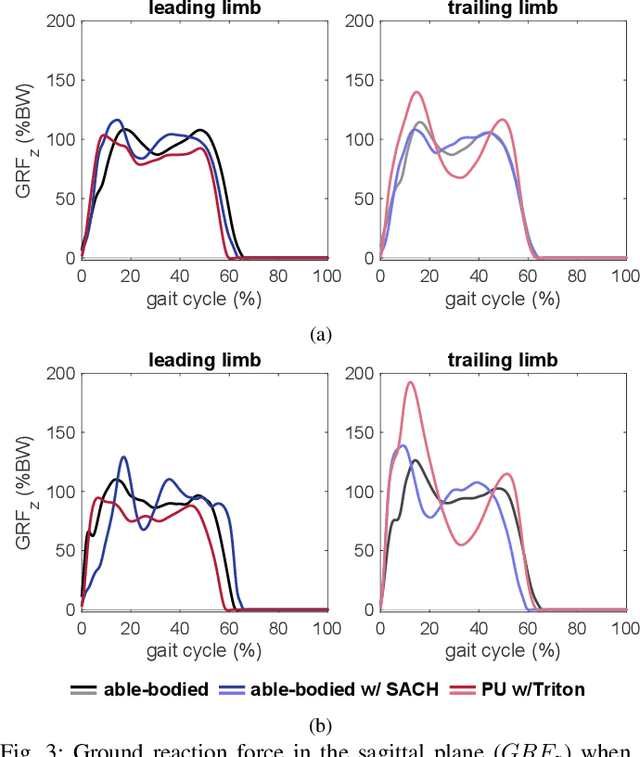
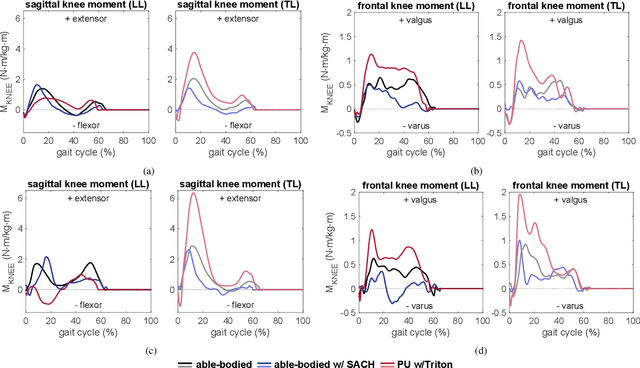
Small obstacles on the ground often lead to a fall when caught with commercial prosthetic feet. Despite some recently developed feet can actively control the ankle angle, for instance over slopes, their flat and rigid sole remains a cause of instability on uneven grounds. Soft robotic feet were recently proposed to tackle that issue; however, they lack consistent experimental validation. Therefore, this paper describes the experimental setup realized to test soft and rigid prosthetic feet with lower-limb prosthetic users. It includes a wooden walkway and differently shaped obstacles. It was preliminary validated with an able-bodied subject, the same subject walking on commercial prostheses through modified walking boots, and with a prosthetic user. They performed walking firstly on even ground, and secondly on even ground stepping on one of the obstacles. Results in terms of vertical ground reaction force and knee moments in both the sagittal and frontal planes show how the poor performance of commonly used prostheses is exacerbated in case of obstacles. The prosthetic user, indeed, noticeably relies on the sound leg to compensate for the stiff and unstable interaction of the prosthetic limb with the obstacle. Therefore, since the limitations of non-adaptive prosthetic feet in obstacle-dealing emerge from the experiments, as expected, this study justifies the use of the setup for investigating the performance of soft feet on uneven grounds and obstacle negotiation.