 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalytical Model and Experimental Testing of the SoftFoot: an Adaptive Robot Foot for Walking over Obstacles and Irregular Terrains
Jan 10, 2024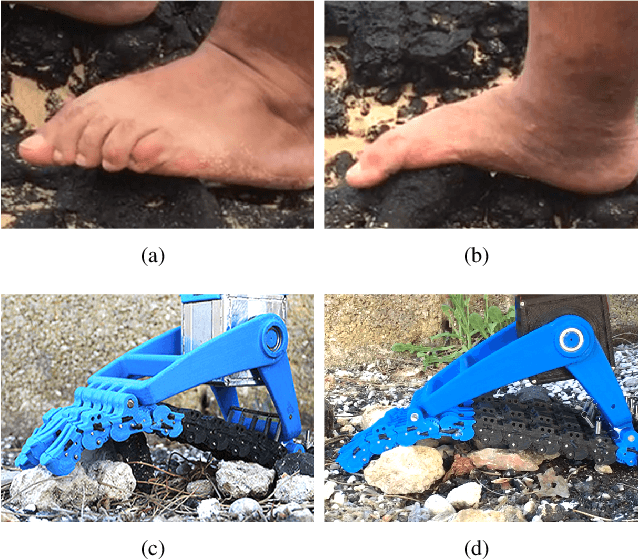
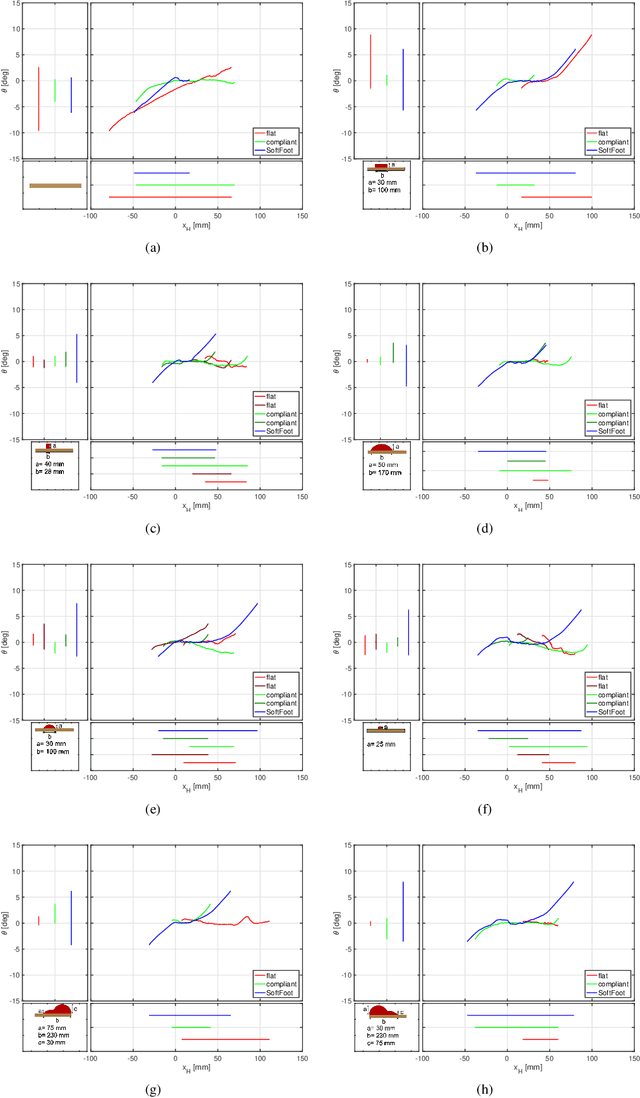
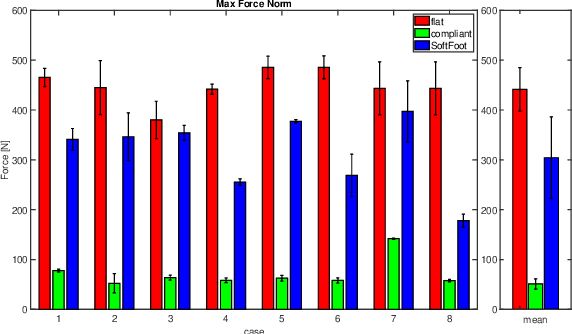
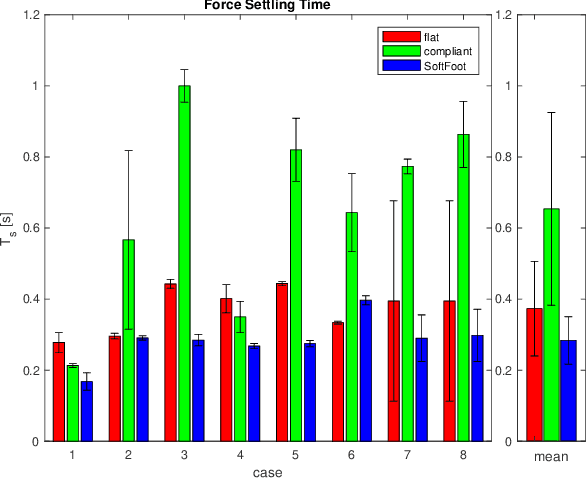
Robot feet are crucial for maintaining dynamic stability and propelling the body during walking, especially on uneven terrains. Traditionally, robot feet were mostly designed as flat and stiff pieces of metal, which meets its limitations when the robot is required to step on irregular grounds, e.g. stones. While one could think that adding compliance under such feet would solve the problem, this is not the case. To address this problem, we introduced the SoftFoot, an adaptive foot design that can enhance walking performance over irregular grounds. The proposed design is completely passive and varies its shape and stiffness based on the exerted forces, through a system of pulley, tendons, and springs opportunely placed in the structure. This paper outlines the motivation behind the SoftFoot and describes the theoretical model which led to its final design. The proposed system has been experimentally tested and compared with two analogous conventional feet, a rigid one and a compliant one, with similar footprints and soles. The experimental validation focuses on the analysis of the standing performance, measured in terms of the equivalent support surface extension and the compensatory ankle angle, and the rejection of impulsive forces, which is important in events such as stepping on unforeseen obstacles. Results show that the SoftFoot has the largest equivalent support surface when standing on obstacles, and absorbs impulsive loads in a way almost as good as a compliant foot.
Learning to Generate All Feasible Actions
Jan 26, 2023



Several machine learning (ML) applications are characterized by searching for an optimal solution to a complex task. The search space for this optimal solution is often very large, so large in fact that this optimal solution is often not computable. Part of the problem is that many candidate solutions found via ML are actually infeasible and have to be discarded. Restricting the search space to only the feasible solution candidates simplifies finding an optimal solution for the tasks. Further, the set of feasible solutions could be re-used in multiple problems characterized by different tasks. In particular, we observe that complex tasks can be decomposed into subtasks and corresponding skills. We propose to learn a reusable and transferable skill by training an actor to generate all feasible actions. The trained actor can then propose feasible actions, among which an optimal one can be chosen according to a specific task. The actor is trained by interpreting the feasibility of each action as a target distribution. The training procedure minimizes a divergence of the actor's output distribution to this target. We derive the general optimization target for arbitrary f-divergences using a combination of kernel density estimates, resampling, and importance sampling. We further utilize an auxiliary critic to reduce the interactions with the environment. A preliminary comparison to related strategies shows that our approach learns to visit all the modes in the feasible action space, demonstrating the framework's potential for learning skills that can be used in various downstream tasks.
Learning 6D Pose Estimation from Synthetic RGBD Images for Robotic Applications
Aug 30, 2022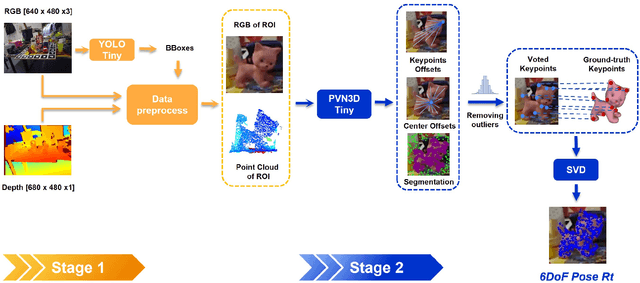
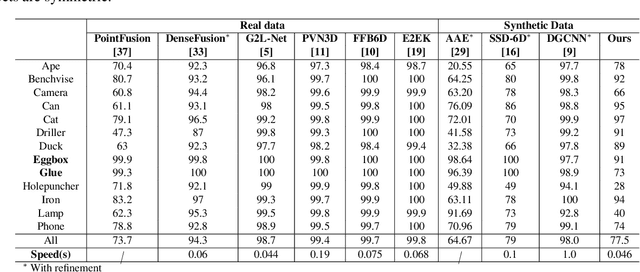
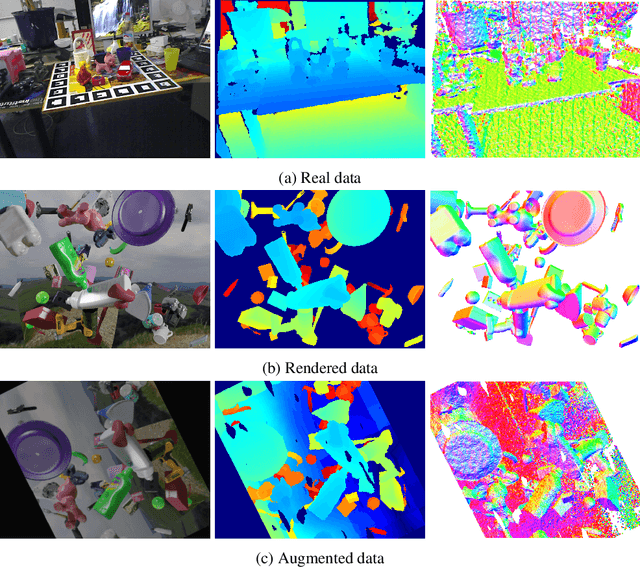
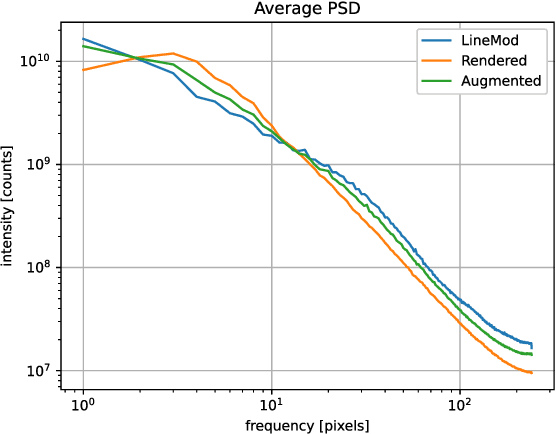
In this work, we propose a data generation pipeline by leveraging the 3D suite Blender to produce synthetic RGBD image datasets with 6D poses for robotic picking. The proposed pipeline can efficiently generate large amounts of photo-realistic RGBD images for the object of interest. In addition, a collection of domain randomization techniques is introduced to bridge the gap between real and synthetic data. Furthermore, we develop a real-time two-stage 6D pose estimation approach by integrating the object detector YOLO-V4-tiny and the 6D pose estimation algorithm PVN3D for time sensitive robotics applications. With the proposed data generation pipeline, our pose estimation approach can be trained from scratch using only synthetic data without any pre-trained models. The resulting network shows competitive performance compared to state-of-the-art methods when evaluated on LineMod dataset. We also demonstrate the proposed approach in a robotic experiment, grasping a household object from cluttered background under different lighting conditions.