 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAction Mapping for Reinforcement Learning in Continuous Environments with Constraints
Dec 05, 2024



Deep reinforcement learning (DRL) has had success across various domains, but applying it to environments with constraints remains challenging due to poor sample efficiency and slow convergence. Recent literature explored incorporating model knowledge to mitigate these problems, particularly through the use of models that assess the feasibility of proposed actions. However, integrating feasibility models efficiently into DRL pipelines in environments with continuous action spaces is non-trivial. We propose a novel DRL training strategy utilizing action mapping that leverages feasibility models to streamline the learning process. By decoupling the learning of feasible actions from policy optimization, action mapping allows DRL agents to focus on selecting the optimal action from a reduced feasible action set. We demonstrate through experiments that action mapping significantly improves training performance in constrained environments with continuous action spaces, especially with imperfect feasibility models.
Learning 6D Pose Estimation from Synthetic RGBD Images for Robotic Applications
Aug 30, 2022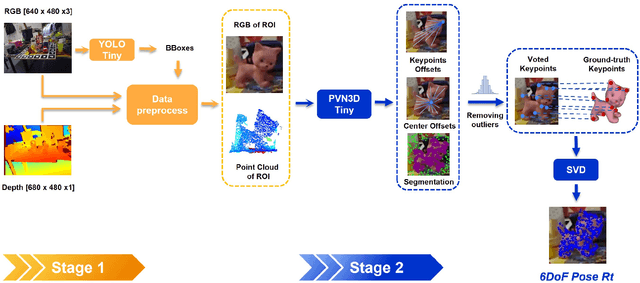
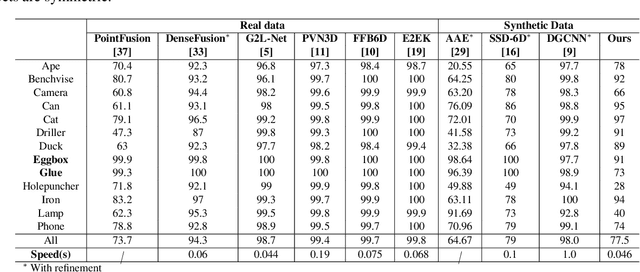
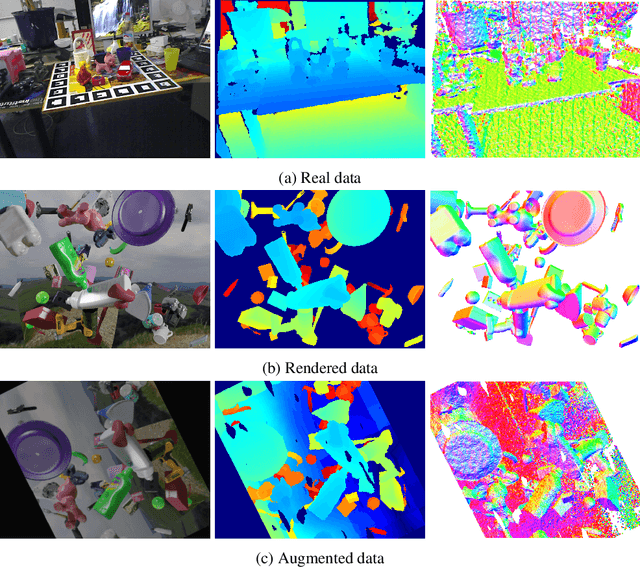
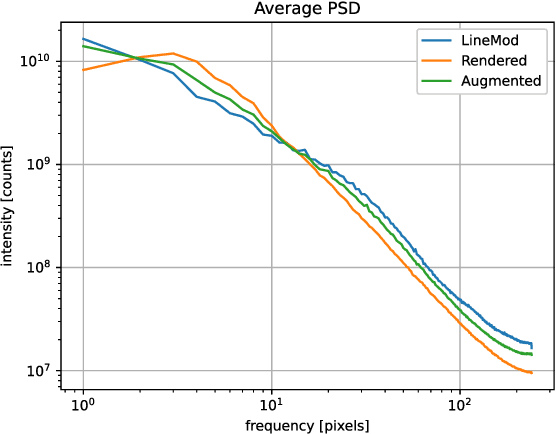
In this work, we propose a data generation pipeline by leveraging the 3D suite Blender to produce synthetic RGBD image datasets with 6D poses for robotic picking. The proposed pipeline can efficiently generate large amounts of photo-realistic RGBD images for the object of interest. In addition, a collection of domain randomization techniques is introduced to bridge the gap between real and synthetic data. Furthermore, we develop a real-time two-stage 6D pose estimation approach by integrating the object detector YOLO-V4-tiny and the 6D pose estimation algorithm PVN3D for time sensitive robotics applications. With the proposed data generation pipeline, our pose estimation approach can be trained from scratch using only synthetic data without any pre-trained models. The resulting network shows competitive performance compared to state-of-the-art methods when evaluated on LineMod dataset. We also demonstrate the proposed approach in a robotic experiment, grasping a household object from cluttered background under different lighting conditions.