 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdge Generation Scheduling for DAG Tasks using Deep Reinforcement Learning
Aug 28, 2023



Directed acyclic graph (DAG) tasks are currently adopted in the real-time domain to model complex applications from the automotive, avionics, and industrial domain that implement their functionalities through chains of intercommunicating tasks. This paper studies the problem of scheduling real-time DAG tasks by presenting a novel schedulability test based on the concept of trivial schedulability. Using this schedulability test, we propose a new DAG scheduling framework (edge generation scheduling -- EGS) that attempts to minimize the DAG width by iteratively generating edges while guaranteeing the deadline constraint. We study how to efficiently solve the problem of generating edges by developing a deep reinforcement learning algorithm combined with a graph representation neural network to learn an efficient edge generation policy for EGS. We evaluate the effectiveness of the proposed algorithm by comparing it with state-of-the-art DAG scheduling heuristics and an optimal mixed-integer linear programming baseline. Experimental results show that the proposed algorithm outperforms the state-of-the-art by requiring fewer processors to schedule the same DAG tasks.
Learning to Generate All Feasible Actions
Jan 26, 2023



Several machine learning (ML) applications are characterized by searching for an optimal solution to a complex task. The search space for this optimal solution is often very large, so large in fact that this optimal solution is often not computable. Part of the problem is that many candidate solutions found via ML are actually infeasible and have to be discarded. Restricting the search space to only the feasible solution candidates simplifies finding an optimal solution for the tasks. Further, the set of feasible solutions could be re-used in multiple problems characterized by different tasks. In particular, we observe that complex tasks can be decomposed into subtasks and corresponding skills. We propose to learn a reusable and transferable skill by training an actor to generate all feasible actions. The trained actor can then propose feasible actions, among which an optimal one can be chosen according to a specific task. The actor is trained by interpreting the feasibility of each action as a target distribution. The training procedure minimizes a divergence of the actor's output distribution to this target. We derive the general optimization target for arbitrary f-divergences using a combination of kernel density estimates, resampling, and importance sampling. We further utilize an auxiliary critic to reduce the interactions with the environment. A preliminary comparison to related strategies shows that our approach learns to visit all the modes in the feasible action space, demonstrating the framework's potential for learning skills that can be used in various downstream tasks.
Learning 6D Pose Estimation from Synthetic RGBD Images for Robotic Applications
Aug 30, 2022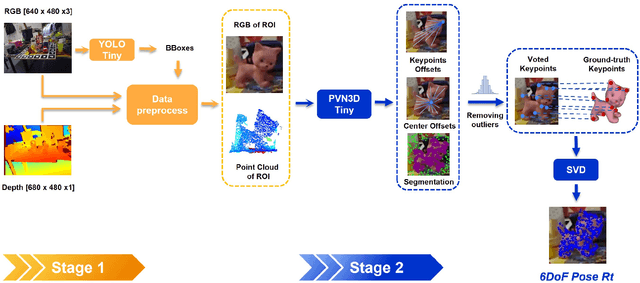
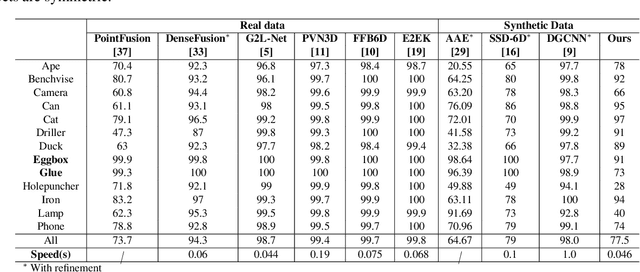
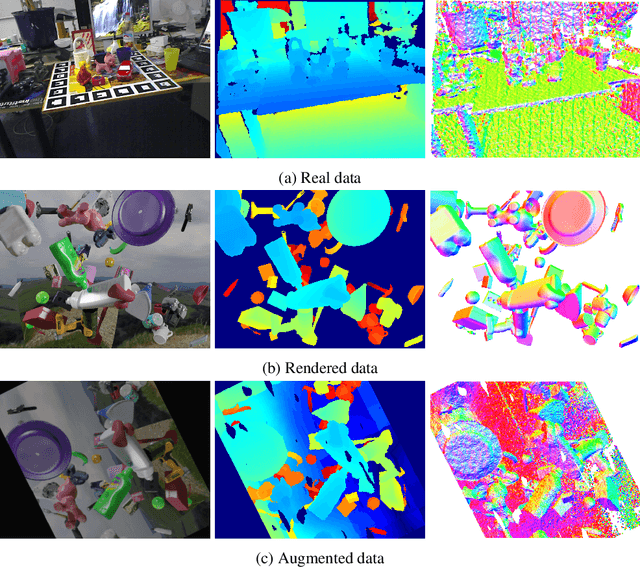
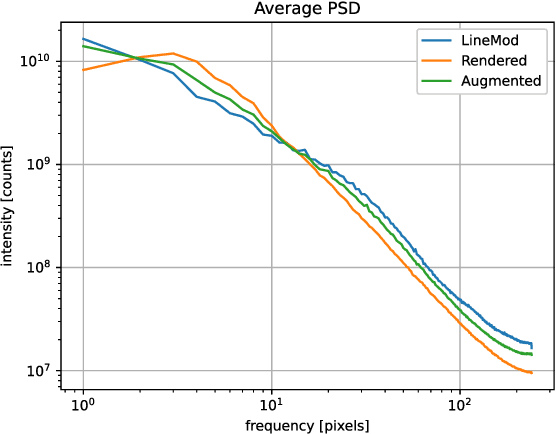
In this work, we propose a data generation pipeline by leveraging the 3D suite Blender to produce synthetic RGBD image datasets with 6D poses for robotic picking. The proposed pipeline can efficiently generate large amounts of photo-realistic RGBD images for the object of interest. In addition, a collection of domain randomization techniques is introduced to bridge the gap between real and synthetic data. Furthermore, we develop a real-time two-stage 6D pose estimation approach by integrating the object detector YOLO-V4-tiny and the 6D pose estimation algorithm PVN3D for time sensitive robotics applications. With the proposed data generation pipeline, our pose estimation approach can be trained from scratch using only synthetic data without any pre-trained models. The resulting network shows competitive performance compared to state-of-the-art methods when evaluated on LineMod dataset. We also demonstrate the proposed approach in a robotic experiment, grasping a household object from cluttered background under different lighting conditions.
A machine-learning approach to synthesize virtual sensors for parameter-varying systems
Mar 23, 2021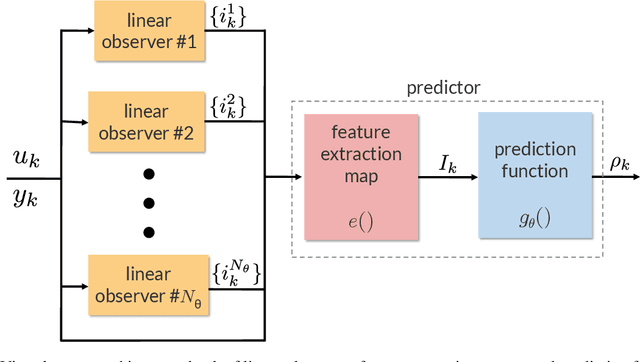
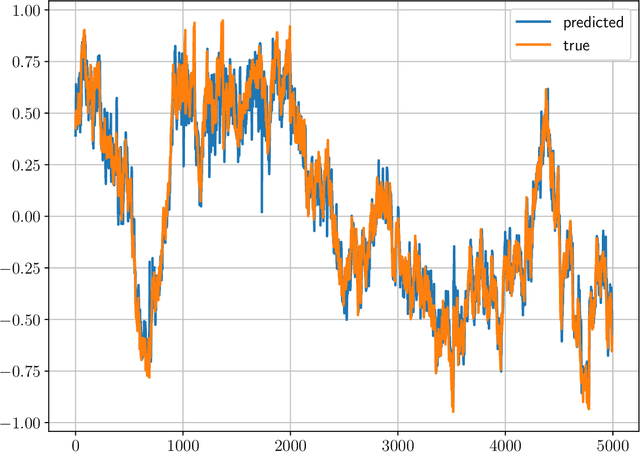
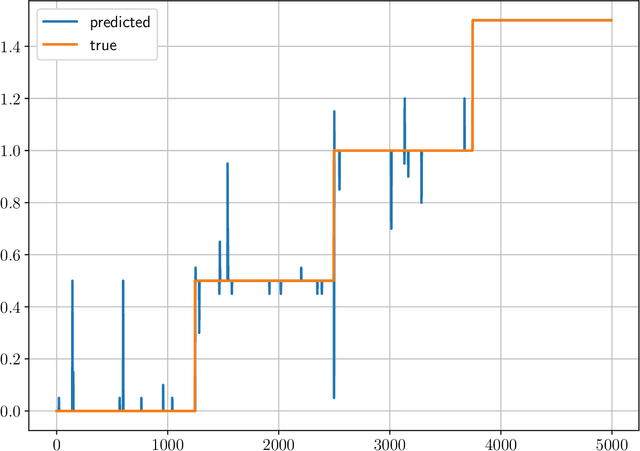
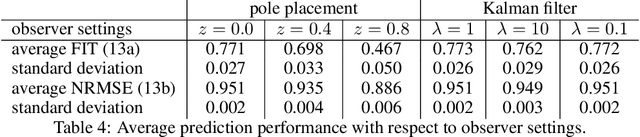
This paper introduces a novel model-free approach to synthesize virtual sensors for the estimation of dynamical quantities that are unmeasurable at runtime but are available for design purposes on test benches. After collecting a dataset of measurements of such quantities, together with other variables that are also available during on-line operations, the virtual sensor is obtained using machine learning techniques by training a predictor whose inputs are the measured variables and the features extracted by a bank of linear observers fed with the same measures. The approach is applicable to infer the value of quantities such as physical states and other time-varying parameters that affect the dynamics of the system. The proposed virtual sensor architecture - whose structure can be related to the Multiple Model Adaptive Estimation framework - is conceived to keep computational and memory requirements as low as possible, so that it can be efficiently implemented in embedded hardware platforms. The effectiveness of the approach is shown in different numerical examples, involving the estimation of the scheduling parameter of a nonlinear parameter-varying system, the reconstruction of the mode of a switching linear system, and the estimation of the state of charge (SoC) of a lithium-ion battery.