 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA neural network-based approach to hybrid systems identification for control
Apr 02, 2024We consider the problem of designing a machine learning-based model of an unknown dynamical system from a finite number of (state-input)-successor state data points, such that the model obtained is also suitable for optimal control design. We propose a specific neural network (NN) architecture that yields a hybrid system with piecewise-affine dynamics that is differentiable with respect to the network's parameters, thereby enabling the use of derivative-based training procedures. We show that a careful choice of our NN's weights produces a hybrid system model with structural properties that are highly favourable when used as part of a finite horizon optimal control problem (OCP). Specifically, we show that optimal solutions with strong local optimality guarantees can be computed via nonlinear programming, in contrast to classical OCPs for general hybrid systems which typically require mixed-integer optimization. In addition to being well-suited for optimal control design, numerical simulations illustrate that our NN-based technique enjoys very similar performance to state-of-the-art system identification methodologies for hybrid systems and it is competitive on nonlinear benchmarks.
A machine-learning approach to synthesize virtual sensors for parameter-varying systems
Mar 23, 2021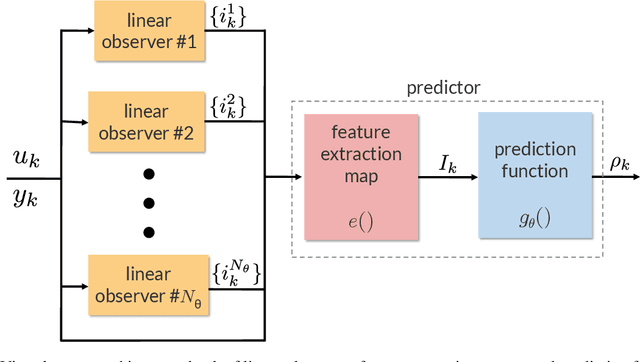
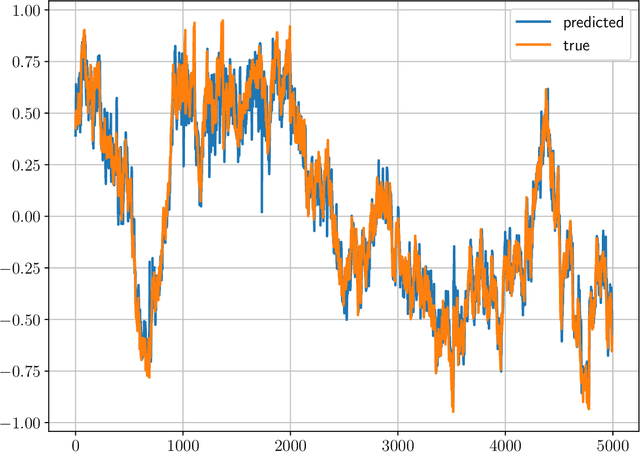
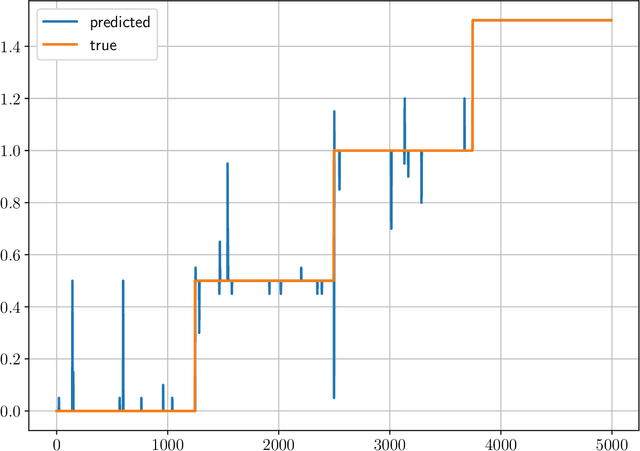
This paper introduces a novel model-free approach to synthesize virtual sensors for the estimation of dynamical quantities that are unmeasurable at runtime but are available for design purposes on test benches. After collecting a dataset of measurements of such quantities, together with other variables that are also available during on-line operations, the virtual sensor is obtained using machine learning techniques by training a predictor whose inputs are the measured variables and the features extracted by a bank of linear observers fed with the same measures. The approach is applicable to infer the value of quantities such as physical states and other time-varying parameters that affect the dynamics of the system. The proposed virtual sensor architecture - whose structure can be related to the Multiple Model Adaptive Estimation framework - is conceived to keep computational and memory requirements as low as possible, so that it can be efficiently implemented in embedded hardware platforms. The effectiveness of the approach is shown in different numerical examples, involving the estimation of the scheduling parameter of a nonlinear parameter-varying system, the reconstruction of the mode of a switching linear system, and the estimation of the state of charge (SoC) of a lithium-ion battery.