 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeINTENTION: Inferring Tendencies of Humanoid Robot Motion Through Interactive Intuition and Grounded VLM
Aug 06, 2025Traditional control and planning for robotic manipulation heavily rely on precise physical models and predefined action sequences. While effective in structured environments, such approaches often fail in real-world scenarios due to modeling inaccuracies and struggle to generalize to novel tasks. In contrast, humans intuitively interact with their surroundings, demonstrating remarkable adaptability, making efficient decisions through implicit physical understanding. In this work, we propose INTENTION, a novel framework enabling robots with learned interactive intuition and autonomous manipulation in diverse scenarios, by integrating Vision-Language Models (VLMs) based scene reasoning with interaction-driven memory. We introduce Memory Graph to record scenes from previous task interactions which embodies human-like understanding and decision-making about different tasks in real world. Meanwhile, we design an Intuitive Perceptor that extracts physical relations and affordances from visual scenes. Together, these components empower robots to infer appropriate interaction behaviors in new scenes without relying on repetitive instructions. Videos: https://robo-intention.github.io
Learning to Recover: Dynamic Reward Shaping with Wheel-Leg Coordination for Fallen Robots
Jun 05, 2025Adaptive recovery from fall incidents are essential skills for the practical deployment of wheeled-legged robots, which uniquely combine the agility of legs with the speed of wheels for rapid recovery. However, traditional methods relying on preplanned recovery motions, simplified dynamics or sparse rewards often fail to produce robust recovery policies. This paper presents a learning-based framework integrating Episode-based Dynamic Reward Shaping and curriculum learning, which dynamically balances exploration of diverse recovery maneuvers with precise posture refinement. An asymmetric actor-critic architecture accelerates training by leveraging privileged information in simulation, while noise-injected observations enhance robustness against uncertainties. We further demonstrate that synergistic wheel-leg coordination reduces joint torque consumption by 15.8% and 26.2% and improves stabilization through energy transfer mechanisms. Extensive evaluations on two distinct quadruped platforms achieve recovery success rates up to 99.1% and 97.8% without platform-specific tuning. The supplementary material is available at https://boyuandeng.github.io/L2R-WheelLegCoordination/
6-DOF All-Terrain Cyclocopter
Sep 24, 2023

This paper presents the design of a 6-DOF all-terrain micro aerial vehicle and two control strategies for multimodal flight, which are experimentally validated. The micro aerial vehicle is propelled by four motors and controlled by a single servo for the control of the cycloidal rotors(cyclorotors) speed and lift direction. Despite the addition of the servo, the system remains underactuated. To address the traditional underactuation problem of cycloidal rotor aircraft, we increase the number of control variables. We propose a PID and a nonlinear model predictive control (NMPC) framework to tackle the model's nonlinearities and achieve control of attitude, position, and their derivatives.Experimental results demonstrate the effectiveness of the proposed multimodal control strategy for 6-DOF all-terrain micro aerial vehicles. The vehicle can operate in aerial, terrestrial, and aquatic modes and can adapt to different terrains and environmental conditions. Our approach enhances the vehicle's performance in each mode of operation, and the results show the advantages of the proposed strategy compared to other control strategies.
Time-attenuating Twin Delayed DDPG Reinforcement Learning for Trajectory Tracking Control of Quadrotors
Feb 13, 2023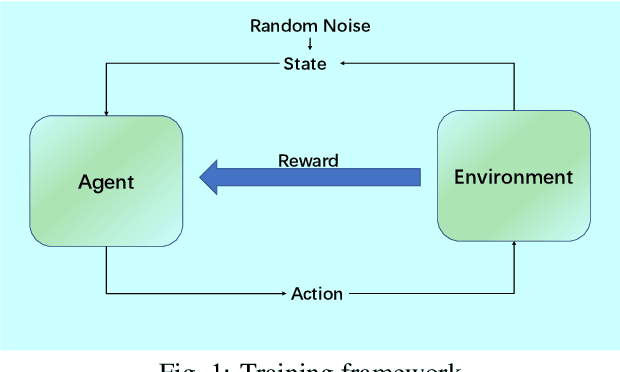
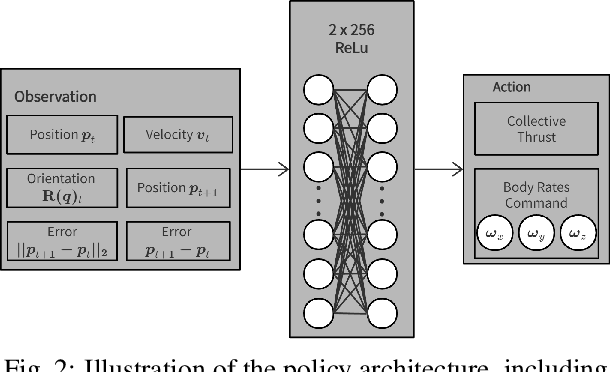
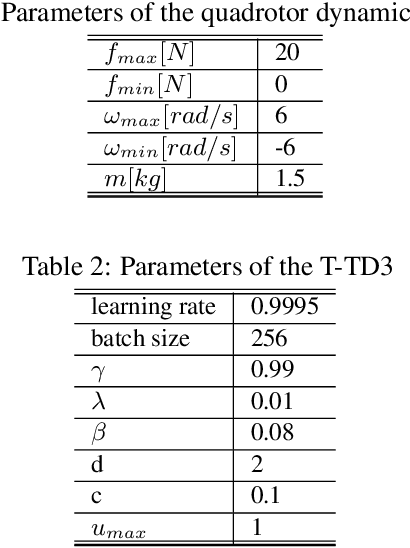
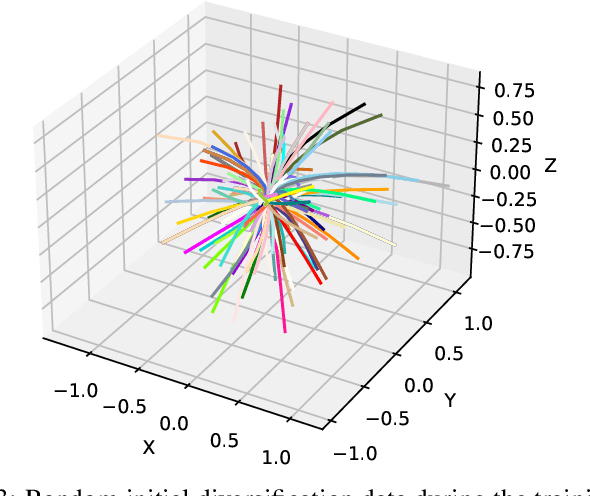
Continuous trajectory tracking control of quadrotors is complicated when considering noise from the environment. Due to the difficulty in modeling the environmental dynamics, tracking methodologies based on conventional control theory, such as model predictive control, have limitations on tracking accuracy and response time. We propose a Time-attenuating Twin Delayed DDPG, a model-free algorithm that is robust to noise, to better handle the trajectory tracking task. A deep reinforcement learning framework is constructed, where a time decay strategy is designed to avoid trapping into local optima. The experimental results show that the tracking error is significantly small, and the operation time is one-tenth of that of a traditional algorithm. The OpenAI Mujoco tool is used to verify the proposed algorithm, and the simulation results show that, the proposed method can significantly improve the training efficiency and effectively improve the accuracy and convergence stability.