 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvoGymCM: Harnessing Continuous Material Stiffness for Soft Robot Co-Design
Apr 09, 2026In the automated co-design of soft robots, precisely adapting the material stiffness field to task environments is crucial for unlocking their full physical potential. However, mainstream platforms (e.g., EvoGym) strictly discretize the material dimension, artificially restricting the design space and performance of soft robots. To address this, we propose EvoGymCM (EvoGym with Continuous Materials), a benchmark suite formally establishing continuous material stiffness as a first-class design variable alongside morphology and control. Aligning with real-world material mechanisms, EvoGymCM introduces two settings: (i) EvoGymCM-R (Reactive), motivated by programmable materials with dynamically tunable stiffness; and (ii) EvoGymCM-I (Invariant), motivated by traditional materials with invariant stiffness fields. To tackle the resulting high-dimensional coupling, we formulate two Morphology-Material-Control co-design paradigms: (i) Reactive-Material Co-Design, which learns real-time stiffness tuning policies to guide programmable materials; and (ii) Invariant-Material Co-Design, which jointly optimizes morphology and fixed material fields to guide traditional material fabrication. Systematic experiments across diverse tasks demonstrate that continuous material optimization boosts performance and unlocks synergy across morphology, material, and control.
Adaptive Robust Estimator for Multi-Agent Reinforcement Learning
Mar 23, 2026Multi-agent collaboration has emerged as a powerful paradigm for enhancing the reasoning capabilities of large language models, yet it suffers from interaction-level ambiguity that blurs generation, critique, and revision, making credit assignment across agents difficult. Moreover, policy optimization in this setting is vulnerable to heavy-tailed and noisy rewards, which can bias advantage estimation and trigger unstable or even divergent training. To address both issues, we propose a robust multi-agent reinforcement learning framework for collaborative reasoning, consisting of two components: Dual-Agent Answer-Critique-Rewrite (DACR) and an Adaptive Robust Estimator (ARE). DACR decomposes reasoning into a structured three-stage pipeline: answer, critique, and rewrite, while enabling explicit attribution of each agent's marginal contribution to its partner's performance. ARE provides robust estimation of batch experience means during multi-agent policy optimization. Across mathematical reasoning and embodied intelligence benchmarks, even under noisy rewards, our method consistently outperforms the baseline in both homogeneous and heterogeneous settings. These results indicate stronger robustness to reward noise and more stable training dynamics, effectively preventing optimization failures caused by noisy reward signals.
SpatialFly: Geometry-Guided Representation Alignment for UAV Vision-and-Language Navigation in Urban Environments
Mar 22, 2026UAVs play an important role in applications such as autonomous exploration, disaster response, and infrastructure inspection. However, UAV VLN in complex 3D environments remains challenging. A key difficulty is the structural representation mismatch between 2D visual perception and the 3D trajectory decision space, which limits spatial reasoning. To this end, we propose SpatialFly, a geometry-guided spatial representation framework for UAV VLN. Operating on RGB observations without explicit 3D reconstruction, SpatialFly introduces a geometry-guided 2D representation alignment mechanism. Specifically, the geometric prior injection module injects global structural cues into 2D semantic tokens to provide scene-level geometric guidance. The geometry-aware reparameterization module then aligns 2D semantic tokens with 3D geometric tokens through cross-modal attention, followed by gated residual fusion to preserve semantic discrimination. Experimental results show that SpatialFly consistently outperforms state-of-the-art UAV VLN baselines across both seen and unseen environments, reducing NE by 4.03m and improving SR by 1.27% over the strongest baseline on the unseen Full split. Additional trajectory-level analysis shows that SpatialFly produces trajectories with better path alignment and smoother, more stable motion.
Diff-Muscle: Efficient Learning for Musculoskeletal Robotic Table Tennis
Mar 09, 2026Musculoskeletal robots provide superior advantages in flexibility and dexterity, positioning them as a promising frontier towards embodied intelligence. However, current research is largely confined to relative simple tasks, restricting the exploration of their full potential in multi-segment coordination. Furthermore, efficient learning remains a challenge, primarily due to the high-dimensional action space and inherent overactuated structures. To address these challenges, we propose Diff-Muscle, a musculoskeletal robot control algorithm that leverages differential flatness to reformulate policy learning from the redundant muscle-activation space into a significantly lower-dimensional joint space. Furthermore, we utilize the highly dynamic robotic table tennis task to evaluate our algorithm. Specifically, we propose a hierarchical reinforcement learning framework that integrates a Kinematics-based Muscle Actuation Controller (K-MAC) with high-level trajectory planning, enabling a musculoskeletal robot to perform dexterous and precise rallies. Experimental results demonstrate that Diff-Muscle significantly outperforms state-of-the-art baselines in success rates while maintaining minimal muscle activation. Notably, the proposed framework successfully enables the musculoskeletal robots to achieve continuous rallies in a challenging dual-robot setting.
LongFly: Long-Horizon UAV Vision-and-Language Navigation with Spatiotemporal Context Integration
Dec 26, 2025Unmanned aerial vehicles (UAVs) are crucial tools for post-disaster search and rescue, facing challenges such as high information density, rapid changes in viewpoint, and dynamic structures, especially in long-horizon navigation. However, current UAV vision-and-language navigation(VLN) methods struggle to model long-horizon spatiotemporal context in complex environments, resulting in inaccurate semantic alignment and unstable path planning. To this end, we propose LongFly, a spatiotemporal context modeling framework for long-horizon UAV VLN. LongFly proposes a history-aware spatiotemporal modeling strategy that transforms fragmented and redundant historical data into structured, compact, and expressive representations. First, we propose the slot-based historical image compression module, which dynamically distills multi-view historical observations into fixed-length contextual representations. Then, the spatiotemporal trajectory encoding module is introduced to capture the temporal dynamics and spatial structure of UAV trajectories. Finally, to integrate existing spatiotemporal context with current observations, we design the prompt-guided multimodal integration module to support time-based reasoning and robust waypoint prediction. Experimental results demonstrate that LongFly outperforms state-of-the-art UAV VLN baselines by 7.89\% in success rate and 6.33\% in success weighted by path length, consistently across both seen and unseen environments.
A General Infrastructure and Workflow for Quadrotor Deep Reinforcement Learning and Reality Deployment
Apr 21, 2025Deploying robot learning methods to a quadrotor in unstructured outdoor environments is an exciting task. Quadrotors operating in real-world environments by learning-based methods encounter several challenges: a large amount of simulator generated data required for training, strict demands for real-time processing onboard, and the sim-to-real gap caused by dynamic and noisy conditions. Current works have made a great breakthrough in applying learning-based methods to end-to-end control of quadrotors, but rarely mention the infrastructure system training from scratch and deploying to reality, which makes it difficult to reproduce methods and applications. To bridge this gap, we propose a platform that enables the seamless transfer of end-to-end deep reinforcement learning (DRL) policies. We integrate the training environment, flight dynamics control, DRL algorithms, the MAVROS middleware stack, and hardware into a comprehensive workflow and architecture that enables quadrotors' policies to be trained from scratch to real-world deployment in several minutes. Our platform provides rich types of environments including hovering, dynamic obstacle avoidance, trajectory tracking, balloon hitting, and planning in unknown environments, as a physical experiment benchmark. Through extensive empirical validation, we demonstrate the efficiency of proposed sim-to-real platform, and robust outdoor flight performance under real-world perturbations. Details can be found from our website https://emnavi.tech/AirGym/.
Learning a Distributed Hierarchical Locomotion Controller for Embodied Cooperation
Jul 09, 2024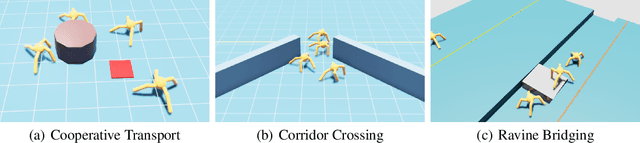

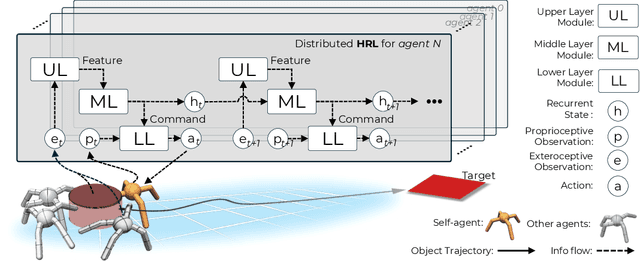

In this work, we propose a distributed hierarchical locomotion control strategy for whole-body cooperation and demonstrate the potential for migration into large numbers of agents. Our method utilizes a hierarchical structure to break down complex tasks into smaller, manageable sub-tasks. By incorporating spatiotemporal continuity features, we establish the sequential logic necessary for causal inference and cooperative behaviour in sequential tasks, thereby facilitating efficient and coordinated control strategies. Through training within this framework, we demonstrate enhanced adaptability and cooperation, leading to superior performance in task completion compared to the original methods. Moreover, we construct a set of environments as the benchmark for embodied cooperation.
CompetEvo: Towards Morphological Evolution from Competition
May 28, 2024



Training an agent to adapt to specific tasks through co-optimization of morphology and control has widely attracted attention. However, whether there exists an optimal configuration and tactics for agents in a multiagent competition scenario is still an issue that is challenging to definitively conclude. In this context, we propose competitive evolution (CompetEvo), which co-evolves agents' designs and tactics in confrontation. We build arenas consisting of three animals and their evolved derivatives, placing agents with different morphologies in direct competition with each other. The results reveal that our method enables agents to evolve a more suitable design and strategy for fighting compared to fixed-morph agents, allowing them to obtain advantages in combat scenarios. Moreover, we demonstrate the amazing and impressive behaviors that emerge when confrontations are conducted under asymmetrical morphs.
Stimulate the Potential of Robots via Competition
Mar 15, 2024



It is common for us to feel pressure in a competition environment, which arises from the desire to obtain success comparing with other individuals or opponents. Although we might get anxious under the pressure, it could also be a drive for us to stimulate our potentials to the best in order to keep up with others. Inspired by this, we propose a competitive learning framework which is able to help individual robot to acquire knowledge from the competition, fully stimulating its dynamics potential in the race. Specifically, the competition information among competitors is introduced as the additional auxiliary signal to learn advantaged actions. We further build a Multiagent-Race environment, and extensive experiments are conducted, demonstrating that robots trained in competitive environments outperform ones that are trained with SoTA algorithms in single robot environment.
6-DOF All-Terrain Cyclocopter
Sep 24, 2023

This paper presents the design of a 6-DOF all-terrain micro aerial vehicle and two control strategies for multimodal flight, which are experimentally validated. The micro aerial vehicle is propelled by four motors and controlled by a single servo for the control of the cycloidal rotors(cyclorotors) speed and lift direction. Despite the addition of the servo, the system remains underactuated. To address the traditional underactuation problem of cycloidal rotor aircraft, we increase the number of control variables. We propose a PID and a nonlinear model predictive control (NMPC) framework to tackle the model's nonlinearities and achieve control of attitude, position, and their derivatives.Experimental results demonstrate the effectiveness of the proposed multimodal control strategy for 6-DOF all-terrain micro aerial vehicles. The vehicle can operate in aerial, terrestrial, and aquatic modes and can adapt to different terrains and environmental conditions. Our approach enhances the vehicle's performance in each mode of operation, and the results show the advantages of the proposed strategy compared to other control strategies.