 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Driven 2D Supervised Fine-Tuning Framework for Bird's Eye View Perception
Sep 09, 2024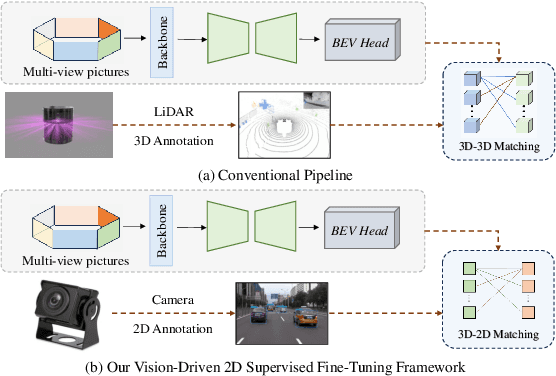
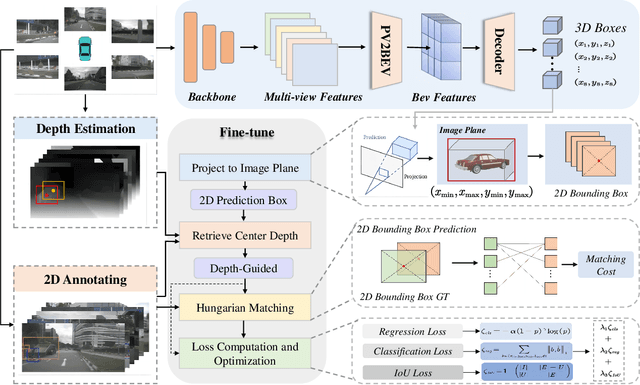
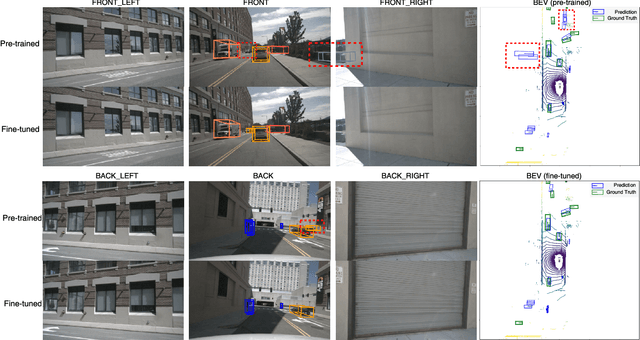

Visual bird's eye view (BEV) perception, due to its excellent perceptual capabilities, is progressively replacing costly LiDAR-based perception systems, especially in the realm of urban intelligent driving. However, this type of perception still relies on LiDAR data to construct ground truth databases, a process that is both cumbersome and time-consuming. Moreover, most massproduced autonomous driving systems are only equipped with surround camera sensors and lack LiDAR data for precise annotation. To tackle this challenge, we propose a fine-tuning method for BEV perception network based on visual 2D semantic perception, aimed at enhancing the model's generalization capabilities in new scene data. Considering the maturity and development of 2D perception technologies, our method significantly reduces the dependency on high-cost BEV ground truths and shows promising industrial application prospects. Extensive experiments and comparative analyses conducted on the nuScenes and Waymo public datasets demonstrate the effectiveness of our proposed method.
Path Planning for Air-Ground Robot Considering Modal Switching Point Optimization
May 14, 2023



An innovative sort of mobility platform that can both drive and fly is the air-ground robot. The need for an agile flight cannot be satisfied by traditional path planning techniques for air-ground robots. Prior studies had mostly focused on improving the energy efficiency of paths, seldom taking the seeking speed and optimizing take-off and landing places into account. A robot for the field application environment was proposed, and a lightweight global spatial planning technique for the robot based on the graph-search algorithm taking mode switching point optimization into account, with an emphasis on energy efficiency, searching speed, and the viability of real deployment. The fundamental concept is to lower the computational burden by employing an interchangeable search approach that combines planar and spatial search. Furthermore, to safeguard the health of the power battery and the integrity of the mission execution, a trap escape approach was also provided. Simulations are run to test the effectiveness of the suggested model based on the field DEM map. The simulation results show that our technology is capable of producing finished, plausible 3D paths with a high degree of believability. Additionally, the mode-switching point optimization method efficiently identifies additional acceptable places for mode switching, and the improved paths use less time and energy.
Technical Report for Argoverse2 Challenge 2022 -- Motion Forecasting Task
Jun 21, 2022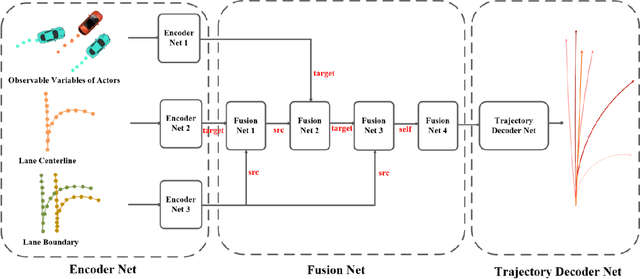

We propose a motion forecasting model called BANet, which means Boundary-Aware Network, and it is a variant of LaneGCN. We believe that it is not enough to use only the lane centerline as input to obtain the embedding features of the vector map nodes. The lane centerline can only provide the topology of the lanes, and other elements of the vector map also contain rich information. For example, the lane boundary can provide traffic rule constraint information such as whether it is possible to change lanes which is very important. Therefore, we achieved better performance by encoding more vector map elements in the motion forecasting model.We report our results on the 2022 Argoverse2 Motion Forecasting challenge and rank 1st on the test leaderboard.
Fast Adaptable Mobile Robot Navigation in Dynamic Environment
Jul 19, 2020
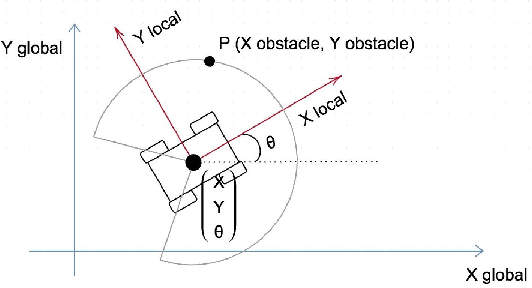
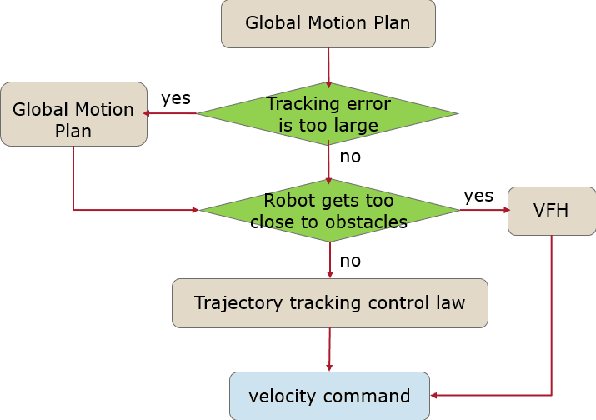
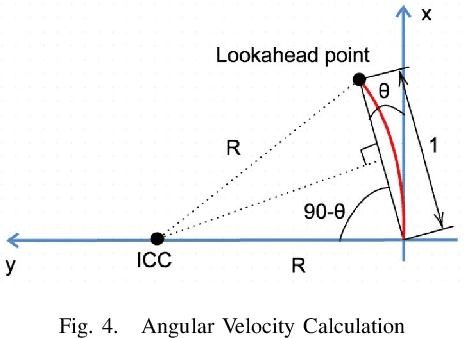
Autonomous navigation in dynamic environment heavily depends on the environment and its topology. Prior knowledge of the environment is not usually accurate as the environment keeps evolving in time. Since robot is continuously evaluating the environment as it proceeds, deciding the optimal way to traverse the environment to get to the goal, computationally efficient yet mathematically adaptive navigation algorithms are needed. In this paper, a navigation scheme for mobile robot, capable of dealing with time variant environment is proposed. This approach consists of a global planner (A*) and local planner (VFH) to assure an optimal and collision-free robot motion. The algorithm is tested both in simulation and experimentation in different environments that are known to result in failures in VFH and ROS navigation stack, for comparison purposes. Overall, the algorithm enables the robot to get to the goal faster and also produces a smoother path while doing so.