 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA-SEE2.0: Active-Sensing End-Effector for Robotic Ultrasound Systems with Dense Contact Surface Perception Enabled Probe Orientation Adjustment
Mar 07, 2025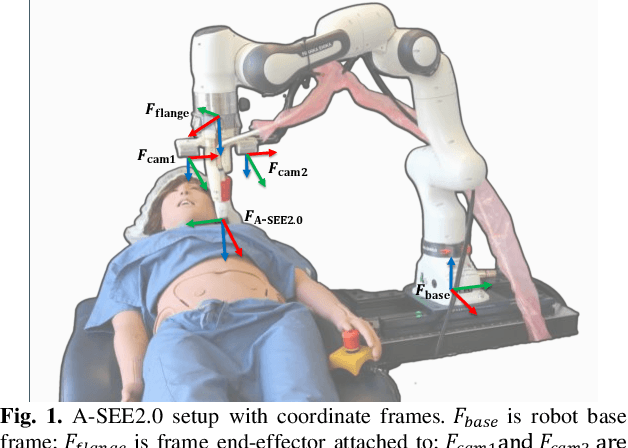
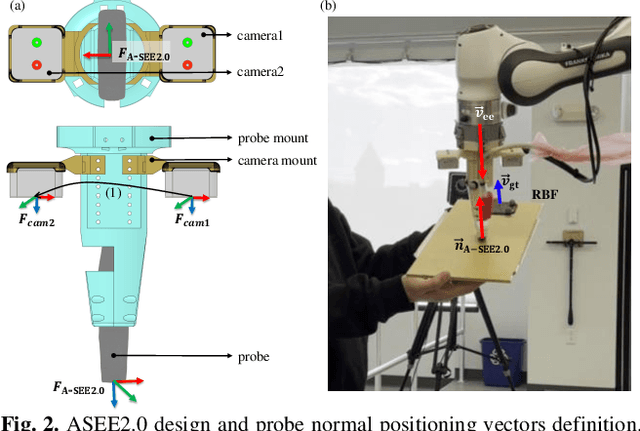
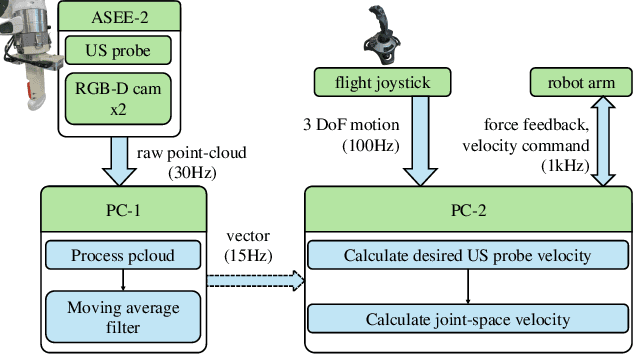
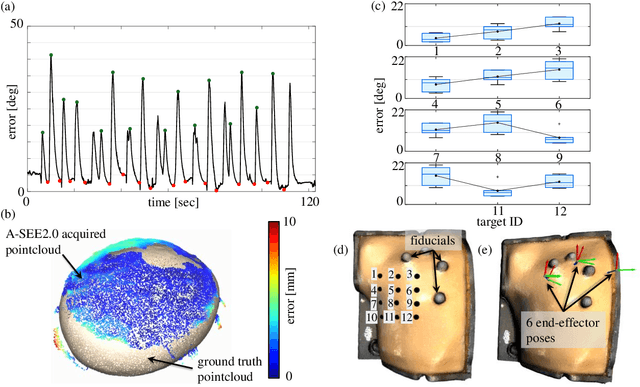
Conventional freehand ultrasound (US) imaging is highly dependent on the skill of the operator, often leading to inconsistent results and increased physical demand on sonographers. Robotic Ultrasound Systems (RUSS) aim to address these limitations by providing standardized and automated imaging solutions, especially in environments with limited access to skilled operators. This paper presents the development of a novel RUSS system that employs dual RGB-D depth cameras to maintain the US probe normal to the skin surface, a critical factor for optimal image quality. Our RUSS integrates RGB-D camera data with robotic control algorithms to maintain orthogonal probe alignment on uneven surfaces without preoperative data. Validation tests using a phantom model demonstrate that the system achieves robust normal positioning accuracy while delivering ultrasound images comparable to those obtained through manual scanning. A-SEE2.0 demonstrates 2.47 ${\pm}$ 1.25 degrees error for flat surface normal-positioning and 12.19 ${\pm}$ 5.81 degrees normal estimation error on mannequin surface. This work highlights the potential of A-SEE2.0 to be used in clinical practice by testing its performance during in-vivo forearm ultrasound examinations.
SPADE: Spectroscopic Photoacoustic Denoising using an Analytical and Data-free Enhancement Framework
Dec 16, 2024



Spectroscopic photoacoustic (sPA) imaging uses multiple wavelengths to differentiate chromophores based on their unique optical absorption spectra. This technique has been widely applied in areas such as vascular mapping, tumor detection, and therapeutic monitoring. However, sPA imaging is highly susceptible to noise, leading to poor signal-to-noise ratio (SNR) and compromised image quality. Traditional denoising techniques like frame averaging, though effective in improving SNR, can be impractical for dynamic imaging scenarios due to reduced frame rates. Advanced methods, including learning-based approaches and analytical algorithms, have demonstrated promise but often require extensive training data and parameter tuning, limiting their adaptability for real-time clinical use. In this work, we propose a sPA denoising using a tuning-free analytical and data-free enhancement (SPADE) framework for denoising sPA images. This framework integrates a data-free learning-based method with an efficient BM3D-based analytical approach while preserves spectral linearity, providing noise reduction and ensuring that functional information is maintained. The SPADE framework was validated through simulation, phantom, ex vivo, and in vivo experiments. Results demonstrated that SPADE improved SNR and preserved spectral information, outperforming conventional methods, especially in challenging imaging conditions. SPADE presents a promising solution for enhancing sPA imaging quality in clinical applications where noise reduction and spectral preservation are critical.
Guiding the Last Centimeter: Novel Anatomy-Aware Probe Servoing for Standardized Imaging Plane Navigation in Robotic Lung Ultrasound
Jun 17, 2024Navigating the ultrasound (US) probe to the standardized imaging plane (SIP) for image acquisition is a critical but operator-dependent task in conventional freehand diagnostic US. Robotic US systems (RUSS) offer the potential to enhance imaging consistency by leveraging real-time US image feedback to optimize the probe pose, thereby reducing reliance on operator expertise. However, determining the proper approach to extracting generalizable features from the US images for probe pose adjustment remain challenging. In this work, we propose a SIP navigation framework for RUSS, exemplified in the context of robotic lung ultrasound (LUS). This framework facilitates automatic probe adjustment when in proximity to the SIP. This is achieved by explicitly extracting multiple anatomical features presented in real-time LUS images and performing non-patient-specific template matching to generate probe motion towards the SIP using image-based visual servoing (IBVS). This framework is further integrated with the active-sensing end-effector (A-SEE), a customized robot end-effector that leverages patient external body geometry to maintain optimal probe alignment with the contact surface, thus preserving US signal quality throughout the navigation. The proposed approach ensures procedural interpretability and inter-patient adaptability. Validation is conducted through anatomy-mimicking phantom and in-vivo evaluations involving five human subjects. The results show the framework's high navigation precision with the probe correctly located at the SIP for all cases, exhibiting positioning error of under 2 mm in translation and under 2 degree in rotation. These results demonstrate the navigation process's capability to accomondate anatomical variations among patients.
Fast Adaptable Mobile Robot Navigation in Dynamic Environment
Jul 19, 2020
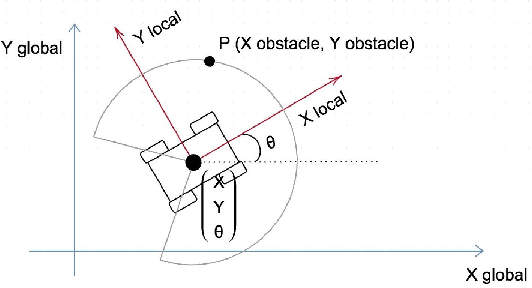
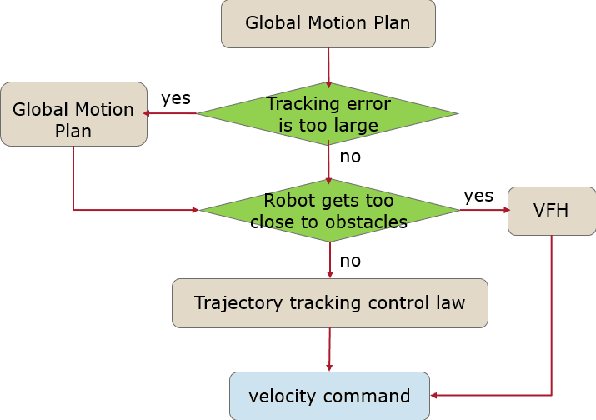
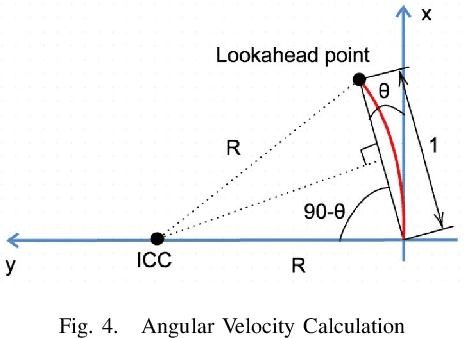
Autonomous navigation in dynamic environment heavily depends on the environment and its topology. Prior knowledge of the environment is not usually accurate as the environment keeps evolving in time. Since robot is continuously evaluating the environment as it proceeds, deciding the optimal way to traverse the environment to get to the goal, computationally efficient yet mathematically adaptive navigation algorithms are needed. In this paper, a navigation scheme for mobile robot, capable of dealing with time variant environment is proposed. This approach consists of a global planner (A*) and local planner (VFH) to assure an optimal and collision-free robot motion. The algorithm is tested both in simulation and experimentation in different environments that are known to result in failures in VFH and ROS navigation stack, for comparison purposes. Overall, the algorithm enables the robot to get to the goal faster and also produces a smoother path while doing so.