 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuiding the Last Centimeter: Novel Anatomy-Aware Probe Servoing for Standardized Imaging Plane Navigation in Robotic Lung Ultrasound
Jun 17, 2024Navigating the ultrasound (US) probe to the standardized imaging plane (SIP) for image acquisition is a critical but operator-dependent task in conventional freehand diagnostic US. Robotic US systems (RUSS) offer the potential to enhance imaging consistency by leveraging real-time US image feedback to optimize the probe pose, thereby reducing reliance on operator expertise. However, determining the proper approach to extracting generalizable features from the US images for probe pose adjustment remain challenging. In this work, we propose a SIP navigation framework for RUSS, exemplified in the context of robotic lung ultrasound (LUS). This framework facilitates automatic probe adjustment when in proximity to the SIP. This is achieved by explicitly extracting multiple anatomical features presented in real-time LUS images and performing non-patient-specific template matching to generate probe motion towards the SIP using image-based visual servoing (IBVS). This framework is further integrated with the active-sensing end-effector (A-SEE), a customized robot end-effector that leverages patient external body geometry to maintain optimal probe alignment with the contact surface, thus preserving US signal quality throughout the navigation. The proposed approach ensures procedural interpretability and inter-patient adaptability. Validation is conducted through anatomy-mimicking phantom and in-vivo evaluations involving five human subjects. The results show the framework's high navigation precision with the probe correctly located at the SIP for all cases, exhibiting positioning error of under 2 mm in translation and under 2 degree in rotation. These results demonstrate the navigation process's capability to accomondate anatomical variations among patients.
Tele-operative Robotic Lung Ultrasound Scanning Platform for Triage of COVID-19 Patients
Nov 12, 2020
Novel severe acute respiratory syndrome coronavirus 2 (SARS-CoV-2) has become a pandemic of epic proportions and a global response to prepare health systems worldwide is of utmost importance. In addition to its cost-effectiveness in a resources-limited setting, lung ultrasound (LUS) has emerged as a rapid noninvasive imaging tool for the diagnosis of COVID-19 infected patients. Concerns surrounding LUS include the disparity of infected patients and healthcare providers, relatively small number of physicians and sonographers capable of performing LUS, and most importantly, the requirement for substantial physical contact between the patient and operator, increasing the risk of transmission. Mitigation of the spread of the virus is of paramount importance. A 2-dimensional (2D) tele-operative robotic platform capable of performing LUS in for COVID-19 infected patients may be of significant benefit. The authors address the aforementioned issues surrounding the use of LUS in the application of COVID- 19 infected patients. In addition, first time application, feasibility and safety were validated in three healthy subjects, along with 2D image optimization and comparison for overall accuracy. Preliminary results demonstrate that the proposed platform allows for successful acquisition and application of LUS in humans.
Computer Vision-Based Health Monitoring of Mecklenburg Bridge Using 3D Digital Image Correlation
Apr 25, 2020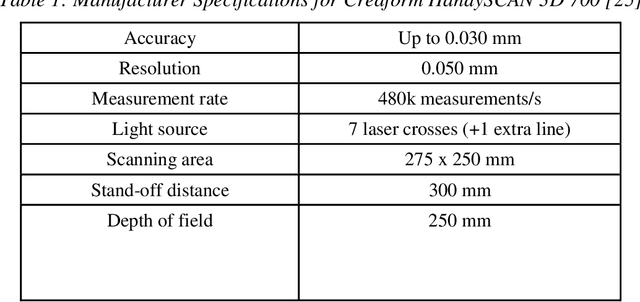
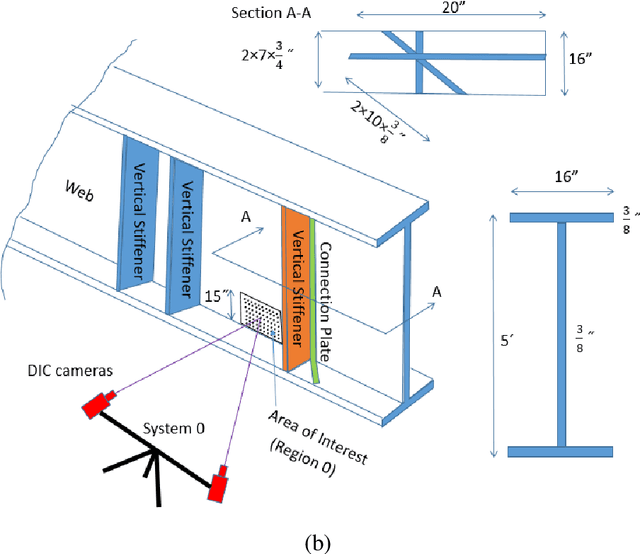
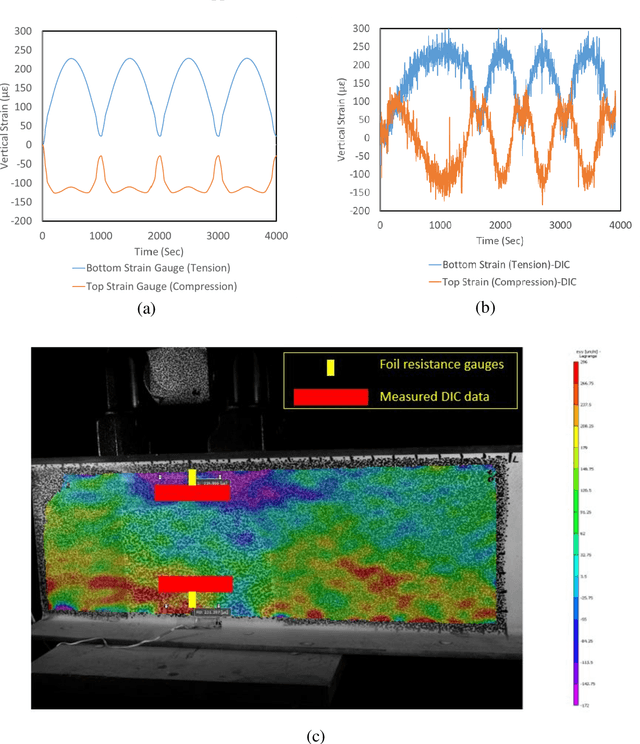
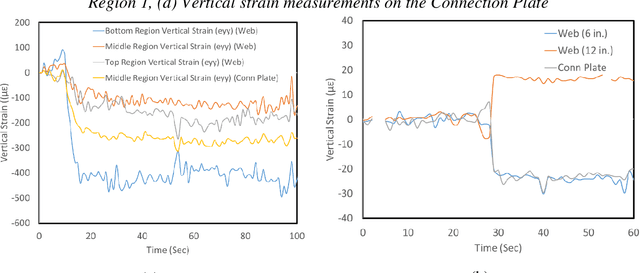
A collaborative investigation between the University of Virginia (UVA) and the Virginia Transportation Research Council was performed on the Mecklenburg Bridge (I-85 over Route 1 in Mecklenburg County). The research team aided the Virginia Department of Transportation - Richmond District in the characterization of the bridge behavior of one of the bridge beams that had been repaired due to a previous web buckling and crippling failure. The investigation focused on collecting full-field three-dimensional digital image correlation (3D-DIC) deformation measurements during the dropping sequence (removal of jacking to support beam on bearing/pier). Additionally, measurements were taken of the section prior to and after dropping using a handheld laser scanner to assess the potential of lateral deformation or out-of-plane buckling. Results from the study demonstrated that buckling of the tested beam did not occur, but did provided a series of approaches that can be used to evaluate the effectiveness of repaired steel beam ends. Specifically, the results provided an approach that could estimate the dead load distribution through back-calculation.