 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiagnostic Posture Control System for Seated-Style Echocardiography Robot
Oct 25, 2022Purpose: Conventional robotic ultrasound systems were utilized with patients in supine positions. Meanwhile, the limitation of the systems is that it is difficult to evacuate the patients in case of emergency (e.g., patient discomfort and system failure) because the patients are restricted between the robot system and bed. Then, it is ideal that the patient undergoes the examination in the sitting position in terms of safety. Therefore, we validated a feasibility study of seated-style echocardiography using a robot. Method: Preliminary experiments were conducted to verify the following two points: (1) the possibility of obtaining cardiac disease features in the sitting posture as well as in the conventional examination, and (2) the relationship between posture angle and physical burden. For reducing the physical burden, two unique mechanisms were incorporated into the system: (1) a leg pendulum base mechanism to reduce the load on the legs when the lateral bending angle increases, and (2) a roll angle division by a lumbar lateral bending and thoracic rotation mechanisms. Results: Preliminary results demonstrated that adjusting the diagnostic posture angle enabled us to obtain the views, including cardiac disease features, as in the conventional examination. The results showed that the body burden increased as the posture's lateral bending angle increased. The results also demonstrated that the body load reduction mechanism incorporated in the results could reduce the physical load in the seated echocardiography. Conclusion: These results showed the potential of the seated-style echocardiography robot.
Toward Fully Automated Robotic Platform for Remote Auscultation
Jan 14, 2022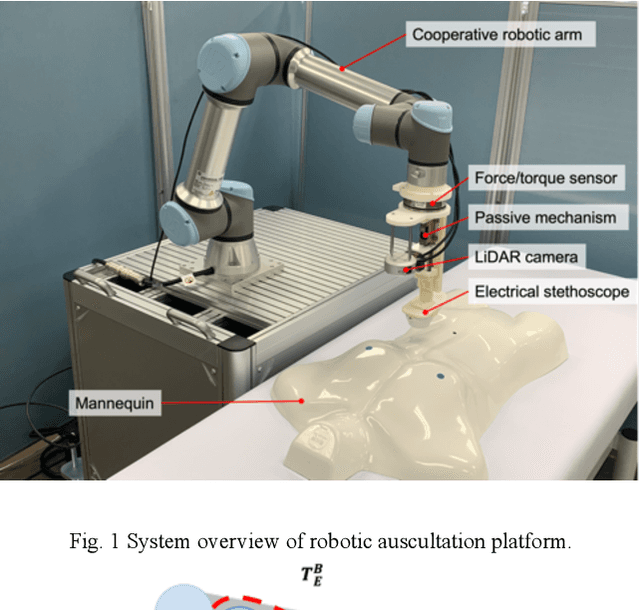
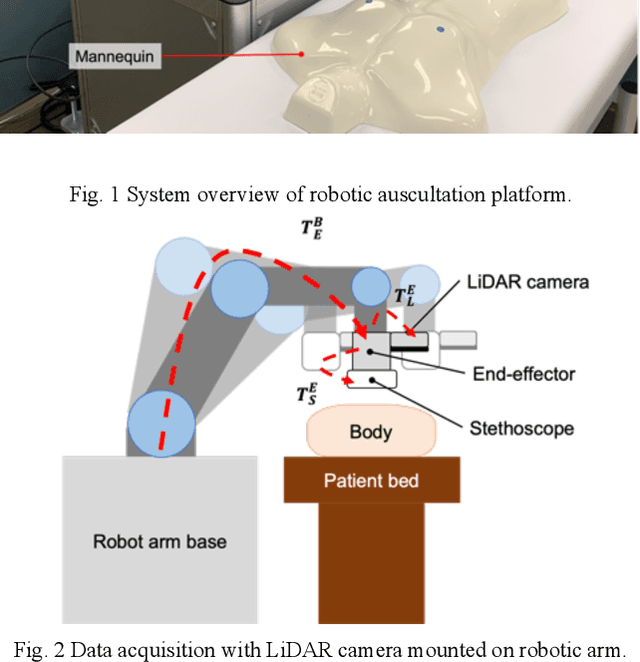


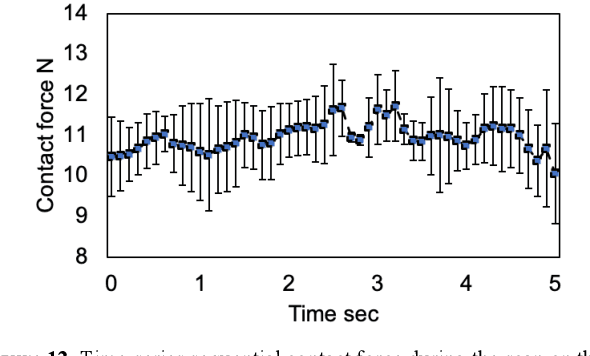
Since most developed countries are facing an increase in the number of patients per healthcare worker due to a declining birth rate and an aging population, relatively simple and safe diagnosis tasks may need to be performed using robotics and automation technologies, without specialists and hospitals. This study presents an automated robotic platform for remote auscultation, which is a highly cost-effective screening tool for detecting abnormal clinical signs. The developed robotic platform is composed of a 6-degree-of-freedom cooperative robotic arm, light detection and ranging (LiDAR) camera, and a spring-based mechanism holding an electric stethoscope. The platform enables autonomous stethoscope positioning based on external body information acquired using the LiDAR camera-based multi-way registration; the platform also ensures safe and flexible contact, maintaining the contact force within a certain range through the passive mechanism. Our preliminary results confirm that the robotic platform enables estimation of the landing positions required for cardiac examinations based on the depth and landmark information of the body surface. It also handles the stethoscope while maintaining the contact force without relying on the push-in displacement by the robotic arm.
Actuated Reflector-Based Three-dimensional Ultrasound Imaging with Adaptive-Delay Synthetic Aperture Focusing
Dec 13, 2021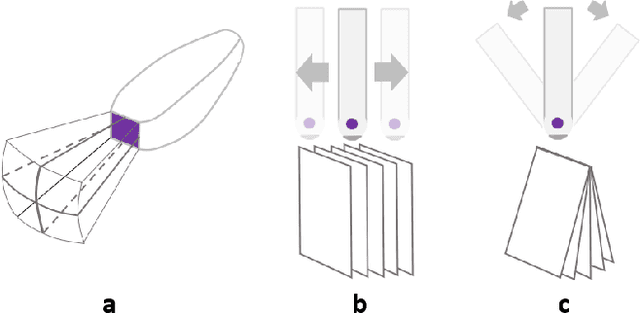

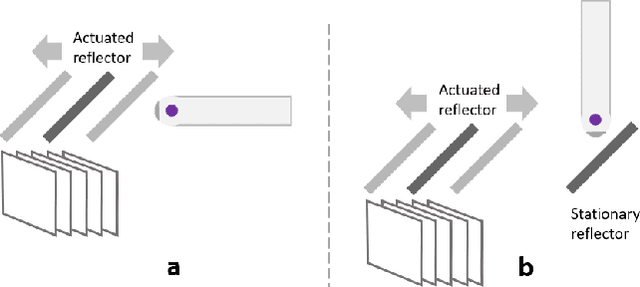
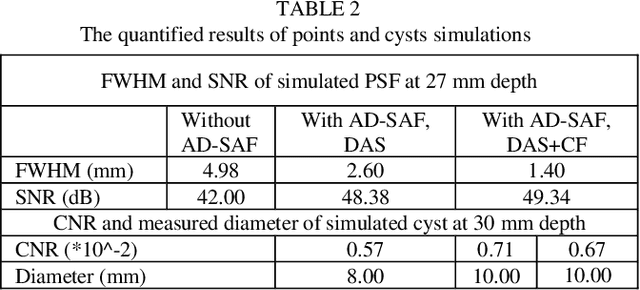
Three-dimensional (3D) ultrasound (US) imaging addresses the limitation in field-of-view (FOV) in conventional two-dimensional (2D) US imaging by providing 3D viewing of the anatomy. 3D US imaging has been extensively adapted for diagnosis and image-guided surgical intervention. However, conventional approaches to implement 3D US imaging require either expensive and sophisticated 2D array transducers, or external actuation mechanisms to move a one-dimensional array mechanically. Here, we propose a 3D US imaging mechanism using actuated acoustic reflector instead of the sensor elements for volume acquisition with significantly extended 3D FOV, which can be implemented with simple hardware and compact size. To improve image quality on the elevation plane, we introduce an adaptive-delay synthetic aperture focusing (AD-SAF) method for elevation beamforming. We first evaluated the proposed imaging mechanism and AD-SAF with simulated point targets and cysts targets. Results of point targets suggested improved image quality on the elevation plane, and results of cysts targets demonstrated a potential to improve 3D visualization of human anatomy. We built a prototype imaging system that has a 3D FOV of 38 mm (lateral) by 38 mm (elevation) by 50 mm (axial) and collected data in imaging experiments with phantoms. Experimental data showed consistency with simulation results. The AD-SAF method enhanced quantifying the cyst volume size in the breast mimicking phantom compared to without elevation beamforming. These results suggested that the proposed 3D US imaging mechanism could potentially be applied in clinical scenarios.
Tele-operative Robotic Lung Ultrasound Scanning Platform for Triage of COVID-19 Patients
Nov 12, 2020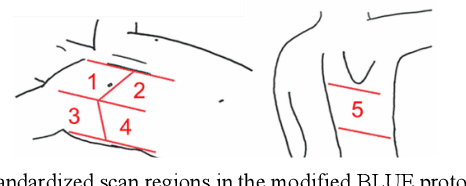
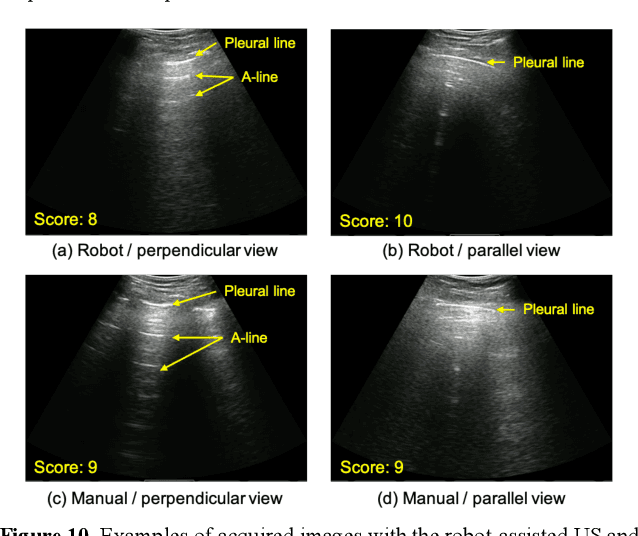
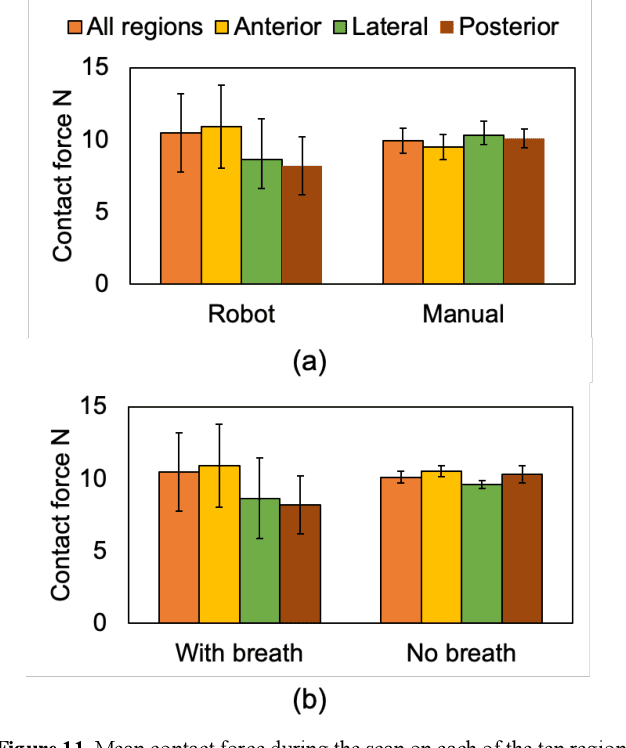
Novel severe acute respiratory syndrome coronavirus 2 (SARS-CoV-2) has become a pandemic of epic proportions and a global response to prepare health systems worldwide is of utmost importance. In addition to its cost-effectiveness in a resources-limited setting, lung ultrasound (LUS) has emerged as a rapid noninvasive imaging tool for the diagnosis of COVID-19 infected patients. Concerns surrounding LUS include the disparity of infected patients and healthcare providers, relatively small number of physicians and sonographers capable of performing LUS, and most importantly, the requirement for substantial physical contact between the patient and operator, increasing the risk of transmission. Mitigation of the spread of the virus is of paramount importance. A 2-dimensional (2D) tele-operative robotic platform capable of performing LUS in for COVID-19 infected patients may be of significant benefit. The authors address the aforementioned issues surrounding the use of LUS in the application of COVID- 19 infected patients. In addition, first time application, feasibility and safety were validated in three healthy subjects, along with 2D image optimization and comparison for overall accuracy. Preliminary results demonstrate that the proposed platform allows for successful acquisition and application of LUS in humans.