 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Intersession Reproducibility for Forearm Ultrasound based Hand Gesture Classification through an Incremental Learning Approach
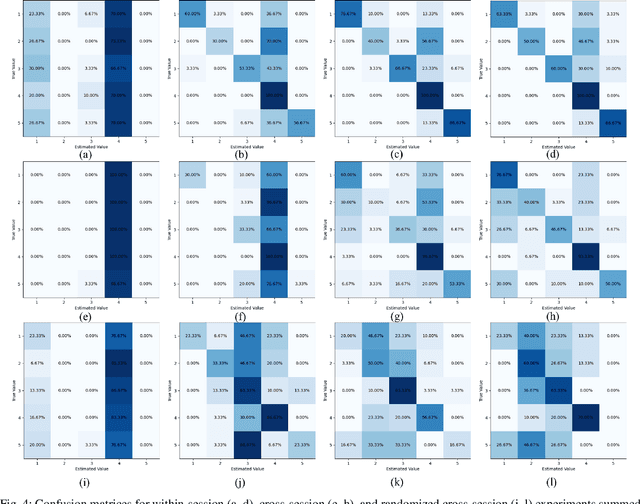
Sep 24, 2024Ultrasound images of the forearm can be used to classify hand gestures towards developing human machine interfaces. In our previous work, we have demonstrated gesture classification using ultrasound on a single subject without removing the probe before evaluation. This has limitations in usage as once the probe is removed and replaced, the accuracy declines since the classifier performance is sensitive to the probe location on the arm. In this paper, we propose training a model on multiple data collection sessions to create a generalized model, utilizing incremental learning through fine tuning. Ultrasound data was acquired for 5 hand gestures within a session (without removing and putting the probe back on) and across sessions. A convolutional neural network (CNN) with 5 cascaded convolution layers was used for this study. A pre-trained CNN was fine tuned with the convolution blocks acting as a feature extractor, and the parameters of the remaining layers updated in an incremental fashion. Fine tuning was done using different session splits within a session and between multiple sessions. We found that incremental fine tuning can help enhance classification accuracy with more fine tuning sessions. After 2 fine tuning sessions for each experiment, we found an approximate 10% increase in classification accuracy. This work demonstrates that incremental learning through fine tuning on ultrasound based hand gesture classification can be used improves accuracy while saving storage, processing power, and time. It can be expanded to generalize between multiple subjects and towards developing personalized wearable devices.
Hand Gesture Classification Based on Forearm Ultrasound Video Snippets Using 3D Convolutional Neural Networks
Sep 24, 2024
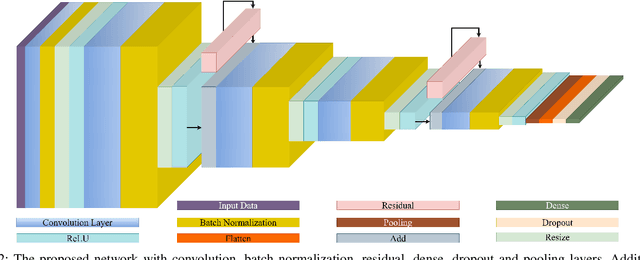
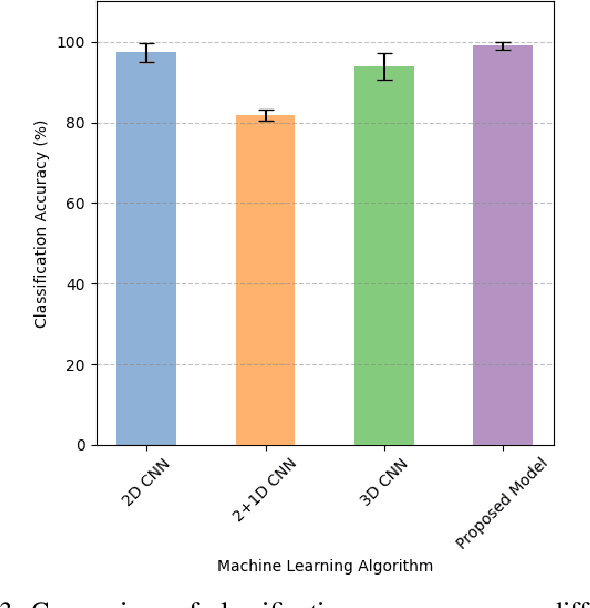
Ultrasound based hand movement estimation is a crucial area of research with applications in human-machine interaction. Forearm ultrasound offers detailed information about muscle morphology changes during hand movement which can be used to estimate hand gestures. Previous work has focused on analyzing 2-Dimensional (2D) ultrasound image frames using techniques such as convolutional neural networks (CNNs). However, such 2D techniques do not capture temporal features from segments of ultrasound data corresponding to continuous hand movements. This study uses 3D CNN based techniques to capture spatio-temporal patterns within ultrasound video segments for gesture recognition. We compared the performance of a 2D convolution-based network with (2+1)D convolution-based, 3D convolution-based, and our proposed network. Our methodology enhanced the gesture classification accuracy to 98.8 +/- 0.9%, from 96.5 +/- 2.3% compared to a network trained with 2D convolution layers. These results demonstrate the advantages of using ultrasound video snippets for improving hand gesture classification performance.
Forearm Ultrasound based Gesture Recognition on Edge
Sep 16, 2024



Ultrasound imaging of the forearm has demonstrated significant potential for accurate hand gesture classification. Despite this progress, there has been limited focus on developing a stand-alone end- to-end gesture recognition system which makes it mobile, real-time and more user friendly. To bridge this gap, this paper explores the deployment of deep neural networks for forearm ultrasound-based hand gesture recognition on edge devices. Utilizing quantization techniques, we achieve substantial reductions in model size while maintaining high accuracy and low latency. Our best model, with Float16 quantization, achieves a test accuracy of 92% and an inference time of 0.31 seconds on a Raspberry Pi. These results demonstrate the feasibility of efficient, real-time gesture recognition on resource-limited edge devices, paving the way for wearable ultrasound-based systems.
Random Channel Ablation for Robust Hand Gesture Classification with Multimodal Biosignals
Jul 15, 2024Biosignal-based hand gesture classification is an important component of effective human-machine interaction. For multimodal biosignal sensing, the modalities often face data loss due to missing channels in the data which can adversely affect the gesture classification performance. To make the classifiers robust to missing channels in the data, this paper proposes using Random Channel Ablation (RChA) during the training process. Ultrasound and force myography (FMG) data were acquired from the forearm for 12 hand gestures over 2 subjects. The resulting multimodal data had 16 total channels, 8 for each modality. The proposed method was applied to convolutional neural network architecture, and compared with baseline, imputation, and oracle methods. Using 5-fold cross-validation for the two subjects, on average, 12.2% and 24.5% improvement was observed for gesture classification with up to 4 and 8 missing channels respectively compared to the baseline. Notably, the proposed method is also robust to an increase in the number of missing channels compared to other methods. These results show the efficacy of using random channel ablation to improve classifier robustness for multimodal and multi-channel biosignal-based hand gesture classification.
GPT Sonograpy: Hand Gesture Decoding from Forearm Ultrasound Images via VLM
Jul 15, 2024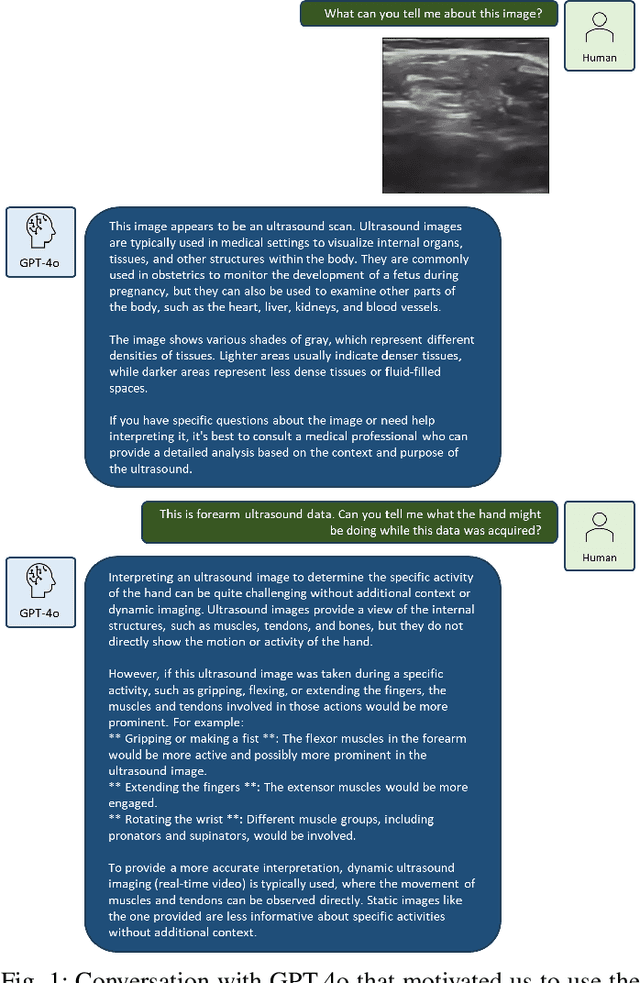
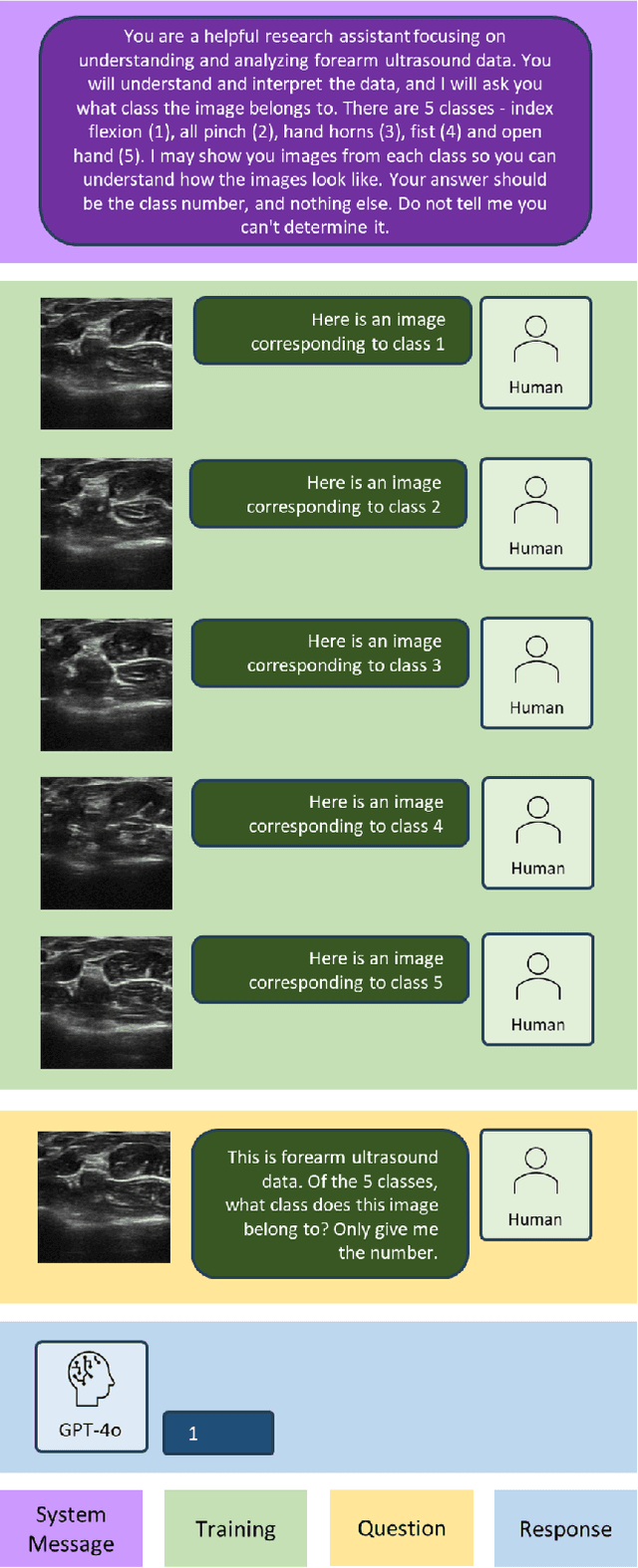
Large vision-language models (LVLMs), such as the Generative Pre-trained Transformer 4-omni (GPT-4o), are emerging multi-modal foundation models which have great potential as powerful artificial-intelligence (AI) assistance tools for a myriad of applications, including healthcare, industrial, and academic sectors. Although such foundation models perform well in a wide range of general tasks, their capability without fine-tuning is often limited in specialized tasks. However, full fine-tuning of large foundation models is challenging due to enormous computation/memory/dataset requirements. We show that GPT-4o can decode hand gestures from forearm ultrasound data even with no fine-tuning, and improves with few-shot, in-context learning.
Simultaneous Estimation of Hand Configurations and Finger Joint Angles using Forearm Ultrasound
Nov 29, 2022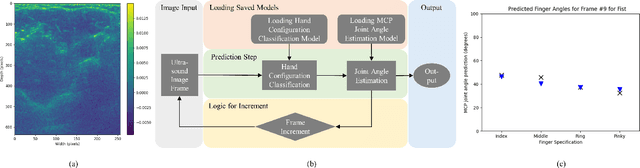
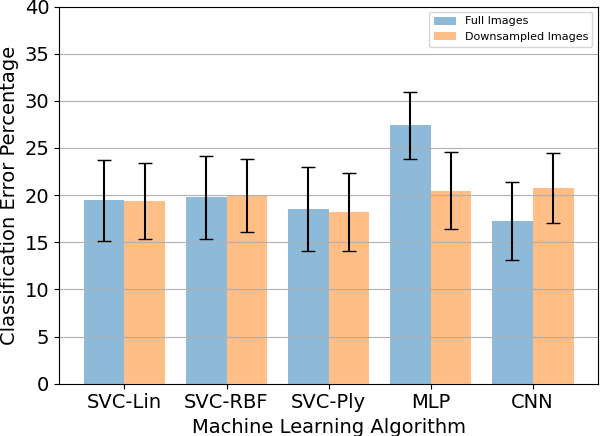
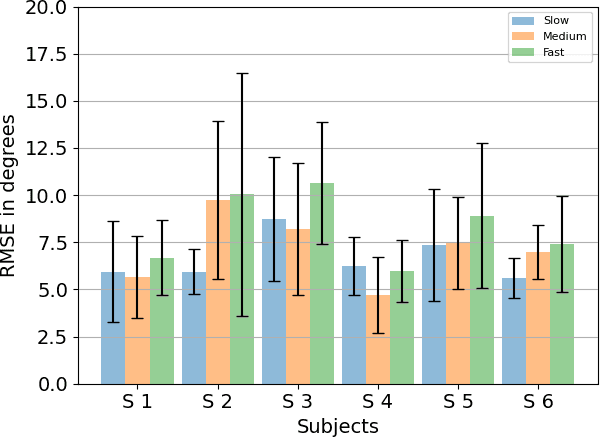
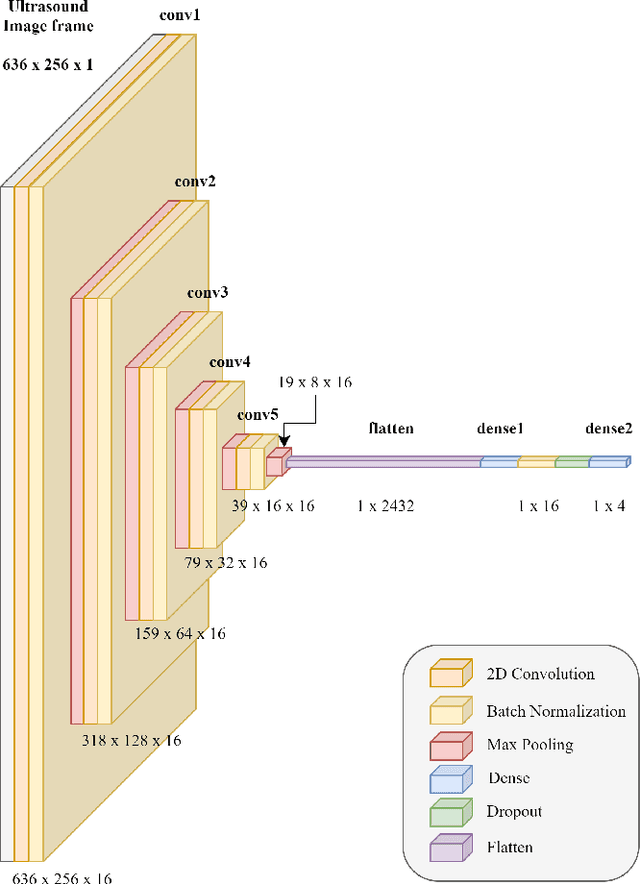
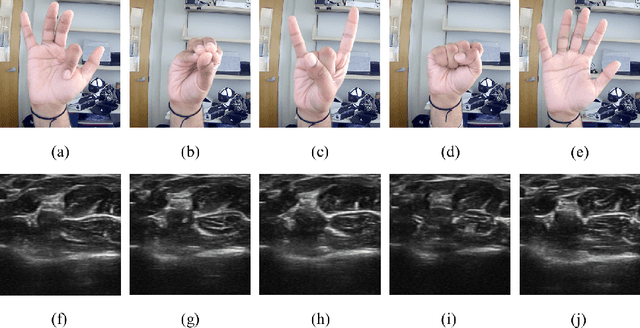
With the advancement in computing and robotics, it is necessary to develop fluent and intuitive methods for interacting with digital systems, augmented/virtual reality (AR/VR) interfaces, and physical robotic systems. Hand motion recognition is widely used to enable these interactions. Hand configuration classification and MCP joint angle detection is important for a comprehensive reconstruction of hand motion. sEMG and other technologies have been used for the detection of hand motions. Forearm ultrasound images provide a musculoskeletal visualization that can be used to understand hand motion. Recent work has shown that these ultrasound images can be classified using machine learning to estimate discrete hand configurations. Estimating both hand configuration and MCP joint angles based on forearm ultrasound has not been addressed in the literature. In this paper, we propose a CNN based deep learning pipeline for predicting the MCP joint angles. The results for the hand configuration classification were compared by using different machine learning algorithms. SVC with different kernels, MLP, and the proposed CNN have been used to classify the ultrasound images into 11 hand configurations based on activities of daily living. Forearm ultrasound images were acquired from 6 subjects instructed to move their hands according to predefined hand configurations. Motion capture data was acquired to get the finger angles corresponding to the hand movements at different speeds. Average classification accuracy of 82.7% for the proposed CNN and over 80% for SVC for different kernels was observed on a subset of the dataset. An average RMSE of 7.35 degrees was obtained between the predicted and the true MCP joint angles. A low latency (6.25 - 9.1 Hz) pipeline has been proposed for estimating both MCP joint angles and hand configuration aimed at real-time control of human-machine interfaces.
Prediction of Metacarpophalangeal joint angles and Classification of Hand configurations based on Ultrasound Imaging of the Forearm
Sep 26, 2021

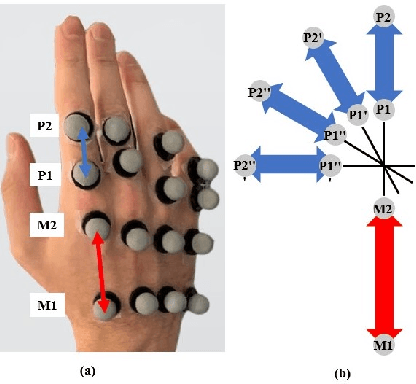
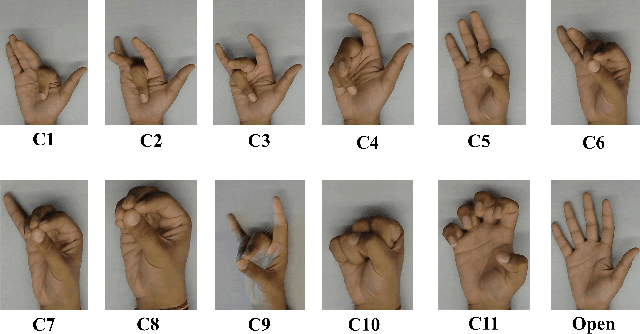
With the advancement in computing and robotics, it is necessary to develop fluent and intuitive methods for interacting with digital systems, AR/VR interfaces, and physical robotic systems. Hand movement recognition is widely used to enable this interaction. Hand configuration classification and Metacarpophalangeal (MCP) joint angle detection are important for a comprehensive reconstruction of the hand motion. Surface electromyography and other technologies have been used for the detection of hand motions. Ultrasound images of the forearm offer a way to visualize the internal physiology of the hand from a musculoskeletal perspective. Recent work has shown that these images can be classified using machine learning to predict various hand configurations. In this paper, we propose a Convolutional Neural Network (CNN) based deep learning pipeline for predicting the MCP joint angles. We supplement our results by using a Support Vector Classifier (SVC) to classify the ultrasound information into several predefined hand configurations based on activities of daily living (ADL). Ultrasound data from the forearm was obtained from 6 subjects who were instructed to move their hands according to predefined hand configurations relevant to ADLs. Motion capture data was acquired as the ground truth for hand movements at different speeds (0.5 Hz, 1 Hz, & 2 Hz) for the index, middle, ring, and pinky fingers. We were able to get promising SVC classification results on a subset of our collected data set. We demonstrated a correspondence between the predicted MCP joint angles and the actual MCP joint angles for the fingers, with an average root mean square error of 7.35 degrees. We implemented a low latency (6.25 - 9.1 Hz) pipeline for the prediction of both MCP joint angles and hand configuration estimation aimed at real-time control of digital devices, AR/VR interfaces, and physical robots.
Tele-operative Robotic Lung Ultrasound Scanning Platform for Triage of COVID-19 Patients
Nov 12, 2020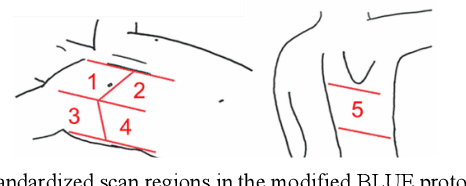
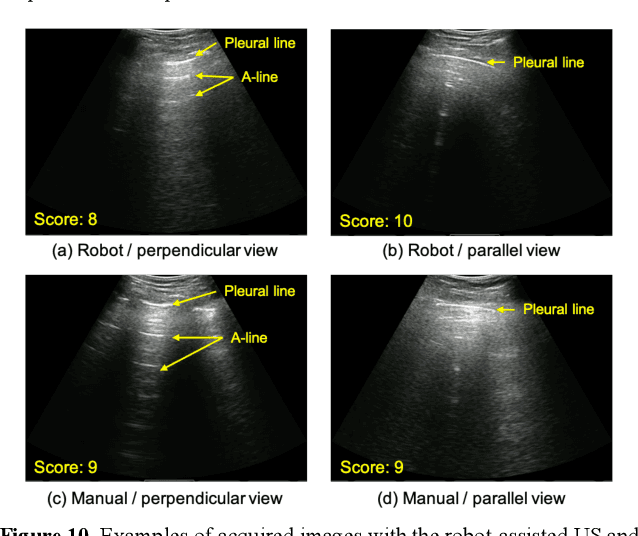
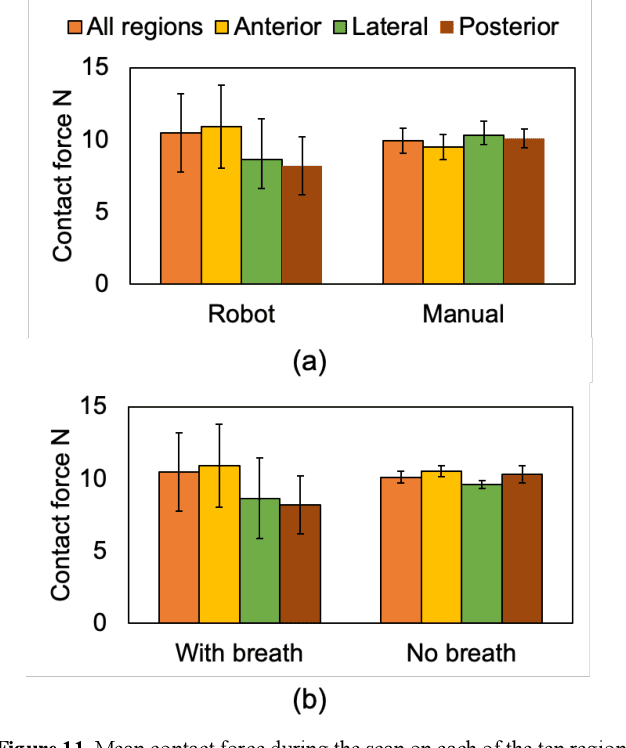
Novel severe acute respiratory syndrome coronavirus 2 (SARS-CoV-2) has become a pandemic of epic proportions and a global response to prepare health systems worldwide is of utmost importance. In addition to its cost-effectiveness in a resources-limited setting, lung ultrasound (LUS) has emerged as a rapid noninvasive imaging tool for the diagnosis of COVID-19 infected patients. Concerns surrounding LUS include the disparity of infected patients and healthcare providers, relatively small number of physicians and sonographers capable of performing LUS, and most importantly, the requirement for substantial physical contact between the patient and operator, increasing the risk of transmission. Mitigation of the spread of the virus is of paramount importance. A 2-dimensional (2D) tele-operative robotic platform capable of performing LUS in for COVID-19 infected patients may be of significant benefit. The authors address the aforementioned issues surrounding the use of LUS in the application of COVID- 19 infected patients. In addition, first time application, feasibility and safety were validated in three healthy subjects, along with 2D image optimization and comparison for overall accuracy. Preliminary results demonstrate that the proposed platform allows for successful acquisition and application of LUS in humans.