 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvReal: Adversarial Patch Generation Framework with Application to Adversarial Safety Evaluation of Object Detection Systems
May 22, 2025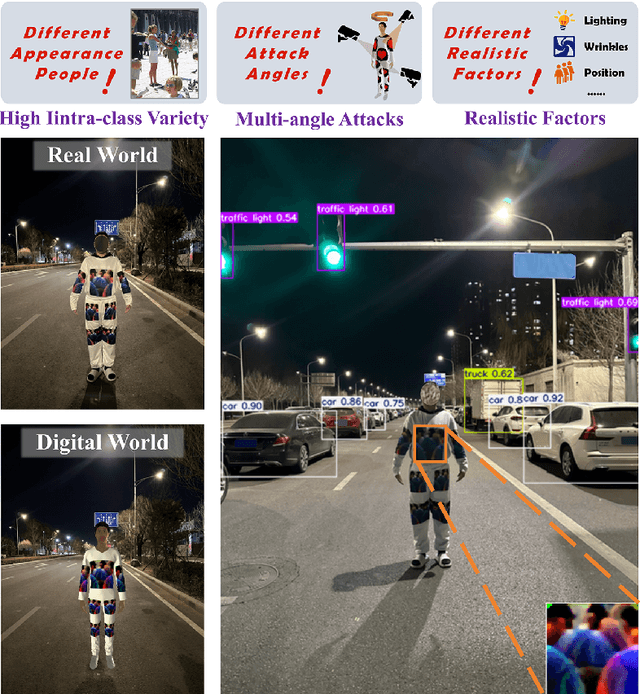
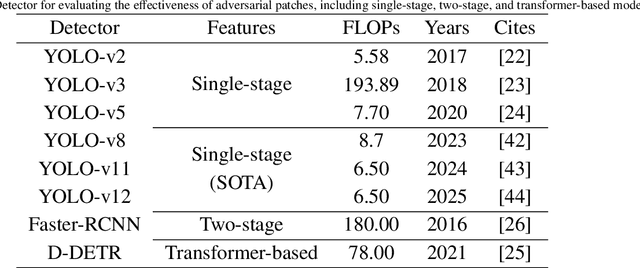
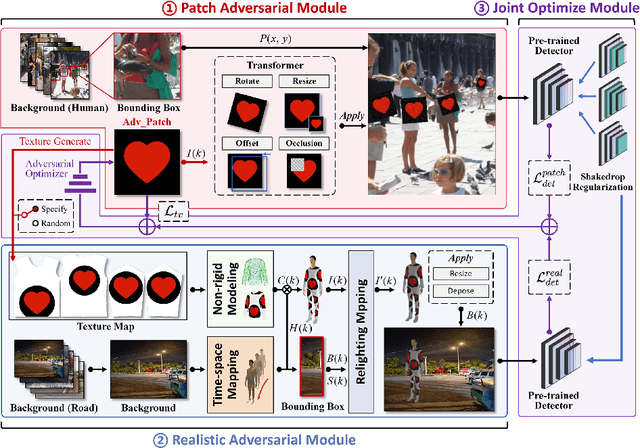
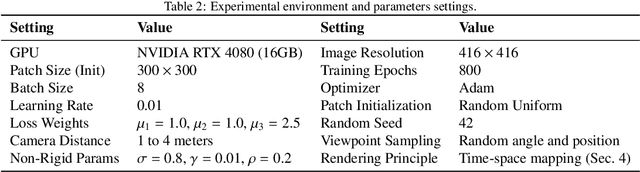
Autonomous vehicles are typical complex intelligent systems with artificial intelligence at their core. However, perception methods based on deep learning are extremely vulnerable to adversarial samples, resulting in safety accidents. How to generate effective adversarial examples in the physical world and evaluate object detection systems is a huge challenge. In this study, we propose a unified joint adversarial training framework for both 2D and 3D samples to address the challenges of intra-class diversity and environmental variations in real-world scenarios. Building upon this framework, we introduce an adversarial sample reality enhancement approach that incorporates non-rigid surface modeling and a realistic 3D matching mechanism. We compare with 5 advanced adversarial patches and evaluate their attack performance on 8 object detecotrs, including single-stage, two-stage, and transformer-based models. Extensive experiment results in digital and physical environments demonstrate that the adversarial textures generated by our method can effectively mislead the target detection model. Moreover, proposed method demonstrates excellent robustness and transferability under multi-angle attacks, varying lighting conditions, and different distance in the physical world. The demo video and code can be obtained at https://github.com/Huangyh98/AdvReal.git.
Biomedical Question Answering via Multi-Level Summarization on a Local Knowledge Graph
Apr 02, 2025



In Question Answering (QA), Retrieval Augmented Generation (RAG) has revolutionized performance in various domains. However, how to effectively capture multi-document relationships, particularly critical for biomedical tasks, remains an open question. In this work, we propose a novel method that utilizes propositional claims to construct a local knowledge graph from retrieved documents. Summaries are then derived via layerwise summarization from the knowledge graph to contextualize a small language model to perform QA. We achieved comparable or superior performance with our method over RAG baselines on several biomedical QA benchmarks. We also evaluated each individual step of our methodology over a targeted set of metrics, demonstrating its effectiveness.
AdvSwap: Covert Adversarial Perturbation with High Frequency Info-swapping for Autonomous Driving Perception
Feb 12, 2025Perception module of Autonomous vehicles (AVs) are increasingly susceptible to be attacked, which exploit vulnerabilities in neural networks through adversarial inputs, thereby compromising the AI safety. Some researches focus on creating covert adversarial samples, but existing global noise techniques are detectable and difficult to deceive the human visual system. This paper introduces a novel adversarial attack method, AdvSwap, which creatively utilizes wavelet-based high-frequency information swapping to generate covert adversarial samples and fool the camera. AdvSwap employs invertible neural network for selective high-frequency information swapping, preserving both forward propagation and data integrity. The scheme effectively removes the original label data and incorporates the guidance image data, producing concealed and robust adversarial samples. Experimental evaluations and comparisons on the GTSRB and nuScenes datasets demonstrate that AdvSwap can make concealed attacks on common traffic targets. The generates adversarial samples are also difficult to perceive by humans and algorithms. Meanwhile, the method has strong attacking robustness and attacking transferability.
Coupled Modeling and Fusion Control for a Multi-modal Deformable Land-air Robot
Nov 09, 2022



This paper introduces a structure-deformable land-air robot which possesses both excellent ground driving and flying ability, with smooth switching mechanism between two modes. The elaborate coupled dynamics model of the proposed robot is established, including rotors, chassis, especially the deformable structures. Furthermore, taking fusion locomotion and complex near-ground situations into consideration, a model based controller is designed for landing and mode switching under various harsh conditions, in which we realise the cooperation between fused two motion modes. The entire system is implemented in ADAMS/Simulink simulation and in practical. We conduct experiments under various complex scenarios. The results show our robot can accomplish land-air switching swiftly and smoothly, and the designed controller can effectively improve the landing flexibility and reliability.
A Multi-modal Deformable Land-air Robot for Complex Environments
Nov 01, 2022



Single locomotion robots often struggle to adapt in highly variable or uncertain environments, especially in emergencies. In this paper, a multi-modal deformable robot is introduced that can both fly and drive. Compatibility issues with multi-modal locomotive fusion for this hybrid land-air robot are solved using proposed design conceptions, including power settings, energy selection, and designs of deformable structure. The robot can also automatically transform between land and air modes during 3D planning and tracking. Meanwhile, we proposed a algorithms for evaluation the performance of land-air robots. A series of comparisons and experiments were conducted to demonstrate the robustness and reliability of the proposed structure in complex field environments.
Intelligent Amphibious Ground-Aerial Vehicles: State of the Art Technology for Future Transportation
Jul 23, 2022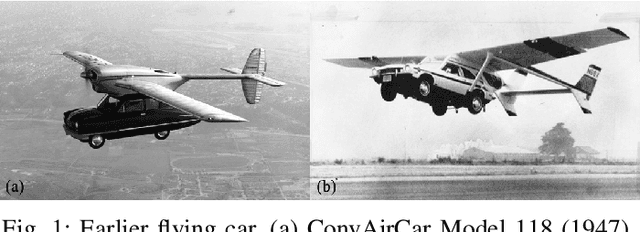
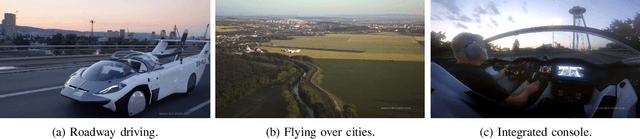
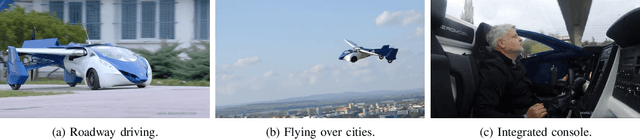

Amphibious ground-aerial vehicles fuse flying and driving modes to enable more flexible air-land mobility and have received growing attention recently. By analyzing the existing amphibious vehicles, we highlight the autonomous fly-driving functionality for the effective uses of amphibious vehicles in complex three-dimensional urban transportation systems. We review and summarize the key enabling technologies for intelligent flying-driving in existing amphibious vehicle designs, identify major technological barriers and propose potential solutions for future research and innovation. This paper aims to serve as a guide for research and development of intelligent amphibious vehicles for urban transportation toward the future.
Improved Context-Based Offline Meta-RL with Attention and Contrastive Learning
Feb 22, 2021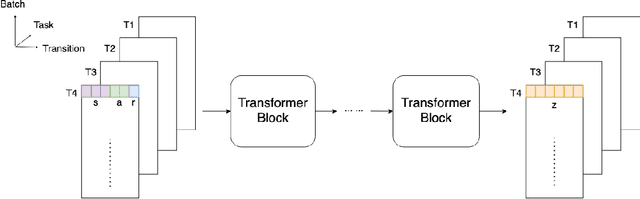
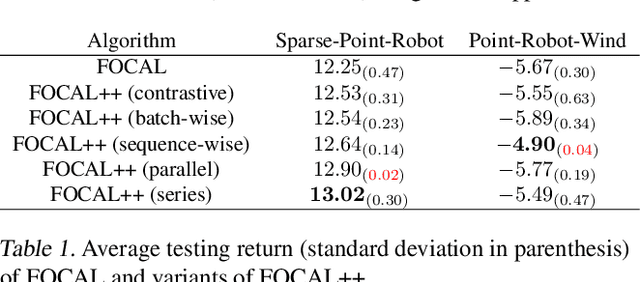
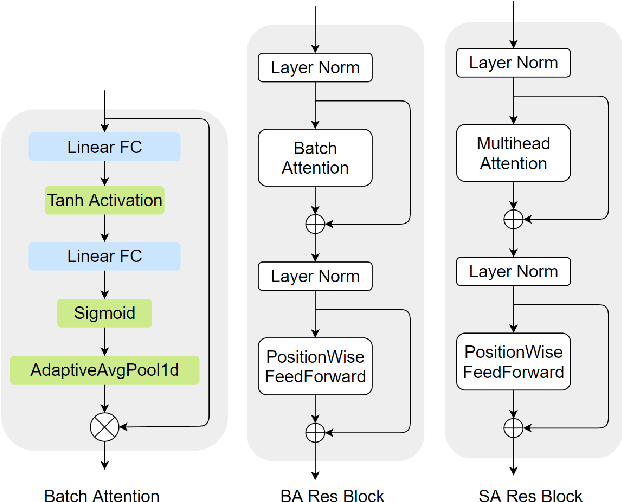
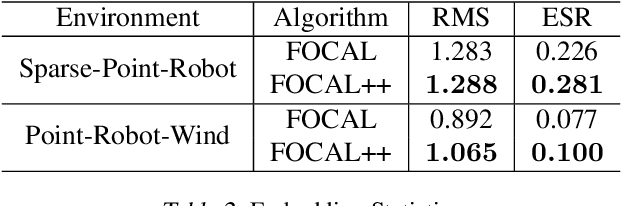
Meta-learning for offline reinforcement learning (OMRL) is an understudied problem with tremendous potential impact by enabling RL algorithms in many real-world applications. A popular solution to the problem is to infer task identity as augmented state using a context-based encoder, for which efficient learning of task representations remains an open challenge. In this work, we improve upon one of the SOTA OMRL algorithms, FOCAL, by incorporating intra-task attention mechanism and inter-task contrastive learning objectives for more effective task inference and learning of control. Theoretical analysis and experiments are presented to demonstrate the superior performance, efficiency and robustness of our end-to-end and model free method compared to prior algorithms across multiple meta-RL benchmarks.