 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexible Disaster Response of Tomorrow -- Final Presentation and Evaluation of the CENTAURO System
Sep 19, 2019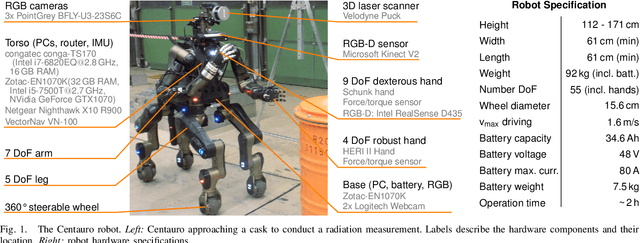
Mobile manipulation robots have high potential to support rescue forces in disaster-response missions. Despite the difficulties imposed by real-world scenarios, robots are promising to perform mission tasks from a safe distance. In the CENTAURO project, we developed a disaster-response system which consists of the highly flexible Centauro robot and suitable control interfaces including an immersive tele-presence suit and support-operator controls on different levels of autonomy. In this article, we give an overview of the final CENTAURO system. In particular, we explain several high-level design decisions and how those were derived from requirements and extensive experience of Kerntechnische Hilfsdienst GmbH, Karlsruhe, Germany (KHG). We focus on components which were recently integrated and report about a systematic evaluation which demonstrated system capabilities and revealed valuable insights.
Remote Mobile Manipulation with the Centauro Robot: Full-body Telepresence and Autonomous Operator Assistance
Aug 05, 2019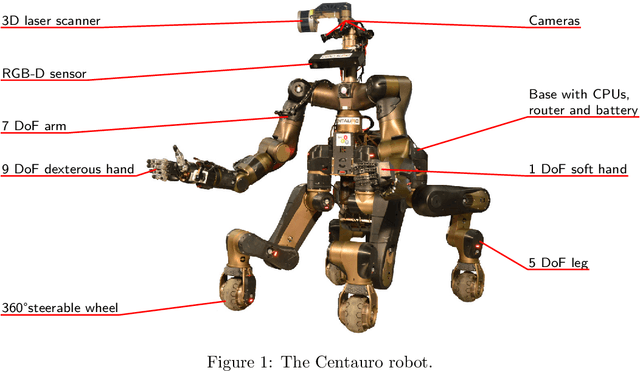
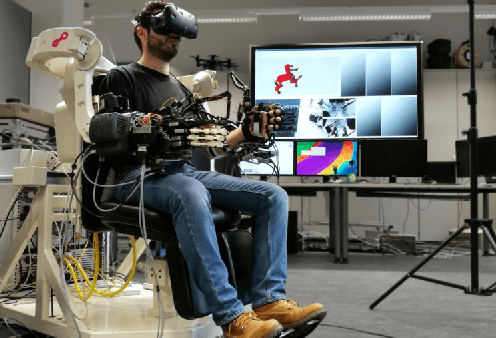
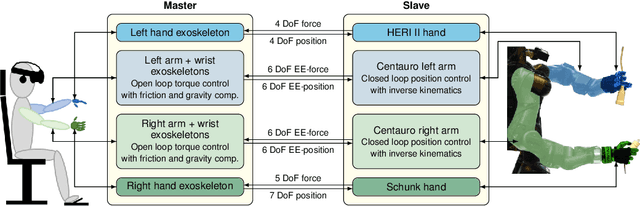
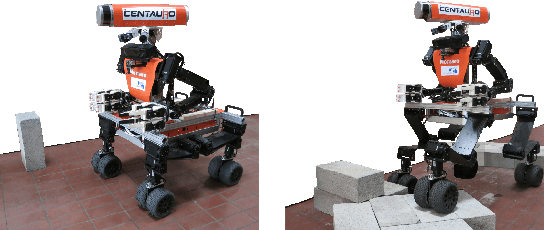
Solving mobile manipulation tasks in inaccessible and dangerous environments is an important application of robots to support humans. Example domains are construction and maintenance of manned and unmanned stations on the moon and other planets. Suitable platforms require flexible and robust hardware, a locomotion approach that allows for navigating a wide variety of terrains, dexterous manipulation capabilities, and respective user interfaces. We present the CENTAURO system which has been designed for these requirements and consists of the Centauro robot and a set of advanced operator interfaces with complementary strength enabling the system to solve a wide range of realistic mobile manipulation tasks. The robot possesses a centaur-like body plan and is driven by torque-controlled compliant actuators. Four articulated legs ending in steerable wheels allow for omnidirectional driving as well as for making steps. An anthropomorphic upper body with two arms ending in five-finger hands enables human-like manipulation. The robot perceives its environment through a suite of multimodal sensors. The resulting platform complexity goes beyond the complexity of most known systems which puts the focus on a suitable operator interface. An operator can control the robot through a telepresence suit, which allows for flexibly solving a large variety of mobile manipulation tasks. Locomotion and manipulation functionalities on different levels of autonomy support the operation. The proposed user interfaces enable solving a wide variety of tasks without previous task-specific training. The integrated system is evaluated in numerous teleoperated experiments that are described along with lessons learned.
Value Iteration Networks on Multiple Levels of Abstraction
May 27, 2019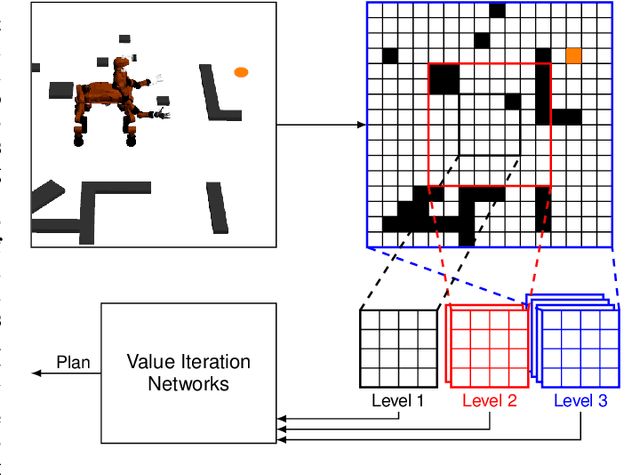

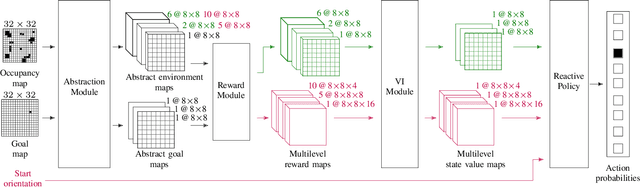
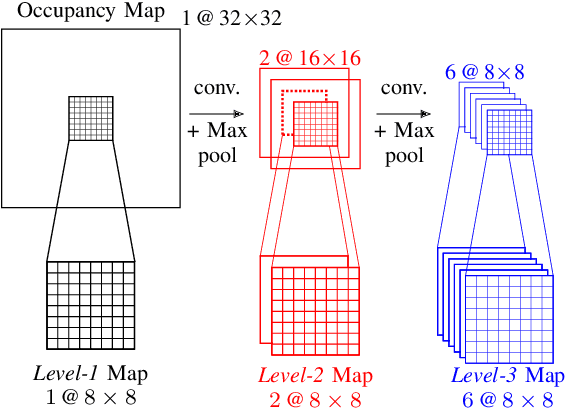
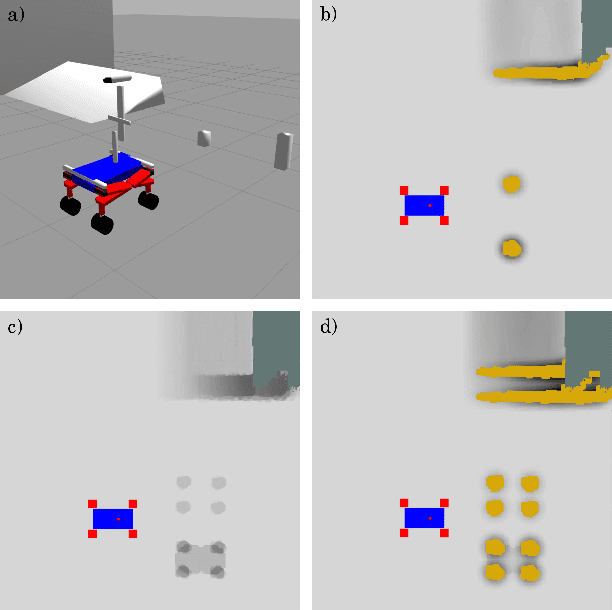
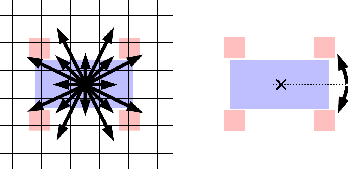
Learning-based methods are promising to plan robot motion without performing extensive search, which is needed by many non-learning approaches. Recently, Value Iteration Networks (VINs) received much interest since---in contrast to standard CNN-based architectures---they learn goal-directed behaviors which generalize well to unseen domains. However, VINs are restricted to small and low-dimensional domains, limiting their applicability to real-world planning problems. To address this issue, we propose to extend VINs to representations with multiple levels of abstraction. While the vicinity of the robot is represented in sufficient detail, the representation gets spatially coarser with increasing distance from the robot. The information loss caused by the decreasing resolution is compensated by increasing the number of features representing a cell. We show that our approach is capable of solving significantly larger 2D grid world planning tasks than the original VIN implementation. In contrast to a multiresolution coarse-to-fine VIN implementation which does not employ additional descriptive features, our approach is capable of solving challenging environments, which demonstrates that the proposed method learns to encode useful information in the additional features. As an application for solving real-world planning tasks, we successfully employ our method to plan omnidirectional driving for a search-and-rescue robot in cluttered terrain.
Towards Learning Abstract Representations for Locomotion Planning in High-dimensional State Spaces
Mar 06, 2019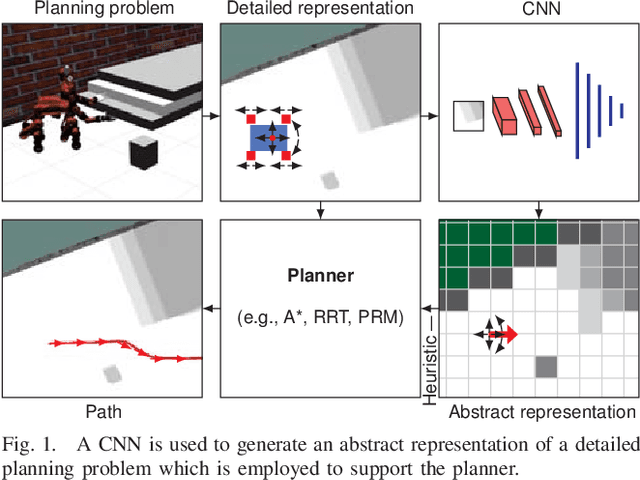

Ground robots which are able to navigate a variety of terrains are needed in many domains. One of the key aspects is the capability to adapt to the ground structure, which can be realized through movable body parts coming along with additional degrees of freedom (DoF). However, planning respective locomotion is challenging since suitable representations result in large state spaces. Employing an additional abstract representation---which is coarser, lower-dimensional, and semantically enriched---can support the planning. While a desired robot representation and action set of such an abstract representation can be easily defined, the cost function requires large tuning efforts. We propose a method to represent the cost function as a CNN. Training of the network is done on generated artificial data, while it generalizes well to the abstraction of real world scenes. We further apply our method to the problem of search-based planning of hybrid driving-stepping locomotion. The abstract representation is used as a powerful informed heuristic which accelerates planning by multiple orders of magnitude.
Supervised Autonomous Locomotion and Manipulation for Disaster Response with a Centaur-like Robot
Mar 06, 2019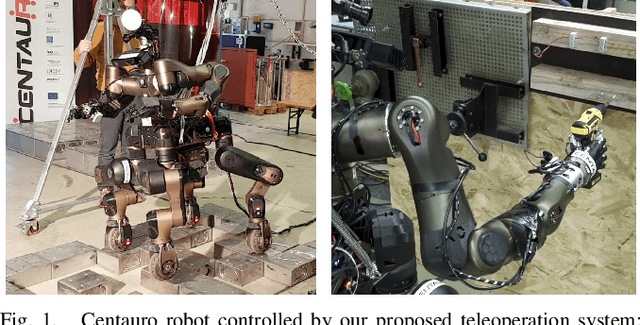
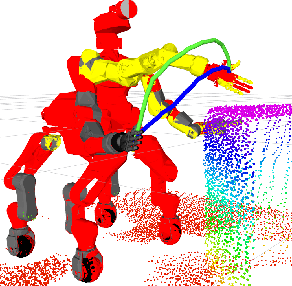
Mobile manipulation tasks are one of the key challenges in the field of search and rescue (SAR) robotics requiring robots with flexible locomotion and manipulation abilities. Since the tasks are mostly unknown in advance, the robot has to adapt to a wide variety of terrains and workspaces during a mission. The centaur-like robot Centauro has a hybrid legged-wheeled base and an anthropomorphic upper body to carry out complex tasks in environments too dangerous for humans. Due to its high number of degrees of freedom, controlling the robot with direct teleoperation approaches is challenging and exhausting. Supervised autonomy approaches are promising to increase quality and speed of control while keeping the flexibility to solve unknown tasks. We developed a set of operator assistance functionalities with different levels of autonomy to control the robot for challenging locomotion and manipulation tasks. The integrated system was evaluated in disaster response scenarios and showed promising performance.
Anytime Hybrid Driving-Stepping Locomotion Planning
Sep 19, 2018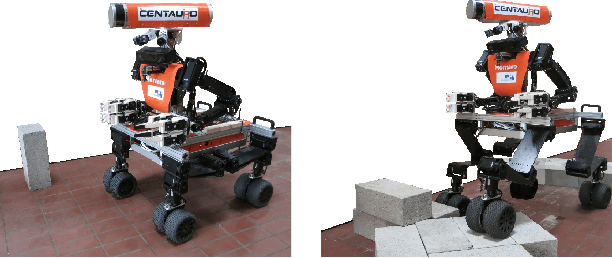
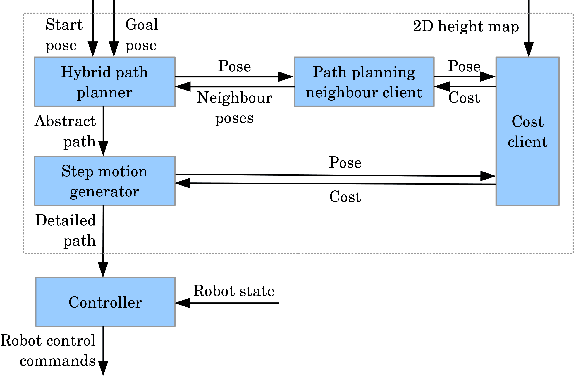
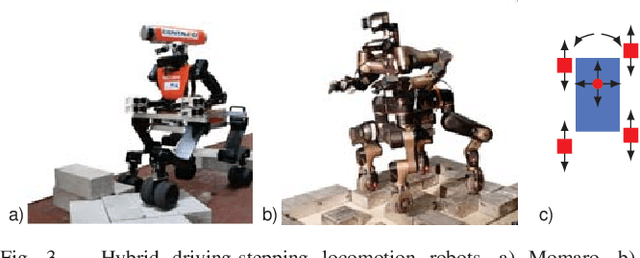
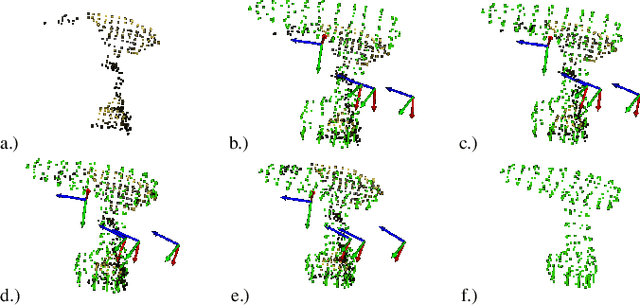
Hybrid driving-stepping locomotion is an effective approach for navigating in a variety of environments. Long, sufficiently even distances can be quickly covered by driving while obstacles can be overcome by stepping. Our quadruped robot Momaro, with steerable pairs of wheels located at the end of each of its compliant legs, allows such locomotion. Planning respective paths attracted only little attention so far. We propose a navigation planning method which generates hybrid locomotion paths. The planner chooses driving mode whenever possible and takes into account the detailed robot footprint. If steps are required, the planner includes those. To accelerate planning, steps are planned first as abstract manoeuvres and are expanded afterwards into detailed motion sequences. Our method ensures at all times that the robot stays stable. Experiments show that the proposed planner is capable of providing paths in feasible time, even for challenging terrain.
Planning Hybrid Driving-Stepping Locomotion on Multiple Levels of Abstraction
Sep 19, 2018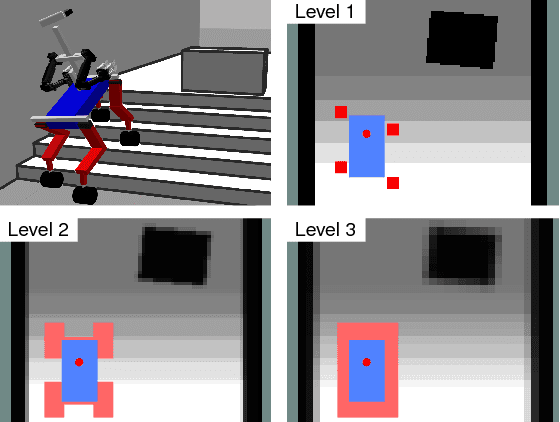
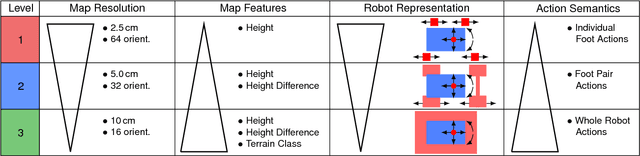
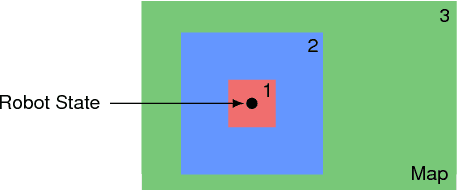
Navigating in search and rescue environments is challenging, since a variety of terrains has to be considered. Hybrid driving-stepping locomotion, as provided by our robot Momaro, is a promising approach. Similar to other locomotion methods, it incorporates many degrees of freedom---offering high flexibility but making planning computationally expensive for larger environments. We propose a navigation planning method, which unifies different levels of representation in a single planner. In the vicinity of the robot, it provides plans with a fine resolution and a high robot state dimensionality. With increasing distance from the robot, plans become coarser and the robot state dimensionality decreases. We compensate this loss of information by enriching coarser representations with additional semantics. Experiments show that the proposed planner provides plans for large, challenging scenarios in feasible time.