 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-centering 3-DOF feet controller for hands-free locomotion control in telepresence and virtual reality
Aug 05, 2024



We present a novel seated foot controller for handling 3-DOF aimed to control locomotion for telepresence robotics and virtual reality environments. Tilting the feet on two axes yields in forward, backward and sideways motion. In addition, a separate rotary joint allows for rotation around the vertical axis. Attached springs on all joints self-center the controller. The HTC Vive tracker is used to translate the trackers' orientation into locomotion commands. The proposed self-centering foot controller was used successfully for the ANA Avatar XPRIZE competition, where a naive operator traversed the robot through a longer distance, surpassing obstacles while solving various interaction and manipulation tasks in between. We publicly provide the models of the mostly 3D-printed feet controller for reproduction.
HortiBot: An Adaptive Multi-Arm System for Robotic Horticulture of Sweet Peppers
Mar 22, 2024Horticultural tasks such as pruning and selective harvesting are labor intensive and horticultural staff are hard to find. Automating these tasks is challenging due to the semi-structured greenhouse workspaces, changing environmental conditions such as lighting, dense plant growth with many occlusions, and the need for gentle manipulation of non-rigid plant organs. In this work, we present the three-armed system HortiBot, with two arms for manipulation and a third arm as an articulated head for active perception using stereo cameras. Its perception system detects not only peppers, but also peduncles and stems in real time, and performs online data association to build a world model of pepper plants. Collision-aware online trajectory generation allows all three arms to safely track their respective targets for observation, grasping, and cutting. We integrated perception and manipulation to perform selective harvesting of peppers and evaluated the system in lab experiments. Using active perception coupled with end-effector force torque sensing for compliant manipulation, HortiBot achieves high success rates.
NimbRo wins ANA Avatar XPRIZE Immersive Telepresence Competition: Human-Centric Evaluation and Lessons Learned
Aug 28, 2023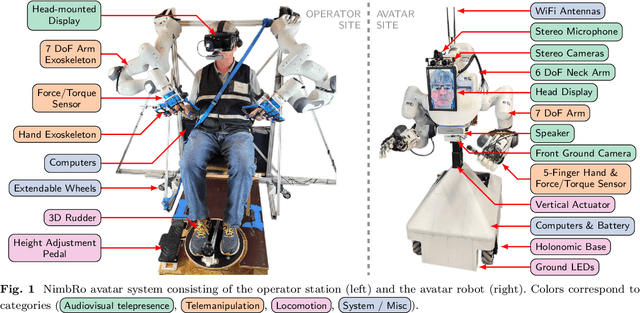
Robotic avatar systems can enable immersive telepresence with locomotion, manipulation, and communication capabilities. We present such an avatar system, based on the key components of immersive 3D visualization and transparent force-feedback telemanipulation. Our avatar robot features an anthropomorphic upper body with dexterous hands. The remote human operator drives the arms and fingers through an exoskeleton-based operator station, which provides force feedback both at the wrist and for each finger. The robot torso is mounted on a holonomic base, providing omnidirectional locomotion on flat floors, controlled using a 3D rudder device. Finally, the robot features a 6D movable head with stereo cameras, which stream images to a VR display worn by the operator. Movement latency is hidden using spherical rendering. The head also carries a telepresence screen displaying an animated image of the operator's face, enabling direct interaction with remote persons. Our system won the \$10M ANA Avatar XPRIZE competition, which challenged teams to develop intuitive and immersive avatar systems that could be operated by briefly trained judges. We analyze our successful participation in the semifinals and finals and provide insight into our operator training and lessons learned. In addition, we evaluate our system in a user study that demonstrates its intuitive and easy usability.
Audio-based Roughness Sensing and Tactile Feedback for Haptic Perception in Telepresence
Mar 13, 2023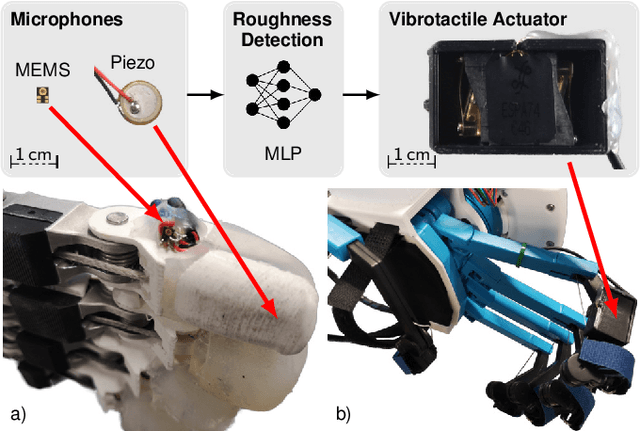
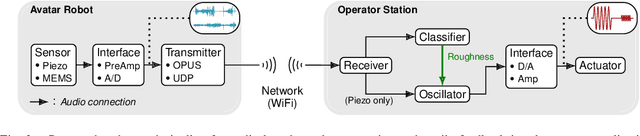
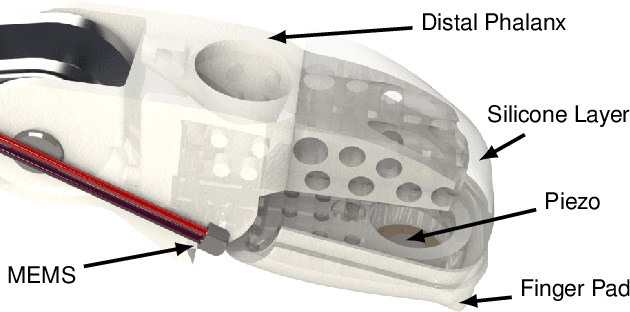
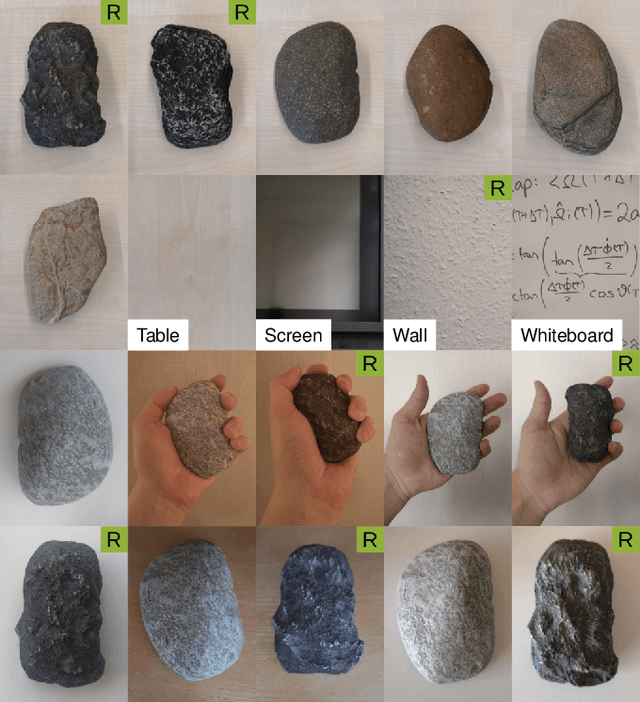
Haptic perception is incredibly important for immersive teleoperation of robots, especially for accomplishing manipulation tasks. We propose a low-cost haptic sensing and rendering system, which is capable of detecting and displaying surface roughness. As the robot fingertip moves across a surface of interest, two microphones capture sound coupled directly through the fingertip and through the air, respectively. A learning-based detector system analyzes the data in real-time and gives roughness estimates with both high temporal resolution and low latency. Finally, an audio-based haptic actuator displays the result to the human operator. We demonstrate the effectiveness of our system through experiments and our winning entry in the ANA Avatar XPRIZE competition finals, where impartial judges solved a roughness-based selection task even without additional vision feedback. We publish our dataset used for training and evaluation together with our trained models to enable reproducibility.
Robust Immersive Telepresence and Mobile Telemanipulation: NimbRo wins ANA Avatar XPRIZE Finals
Mar 06, 2023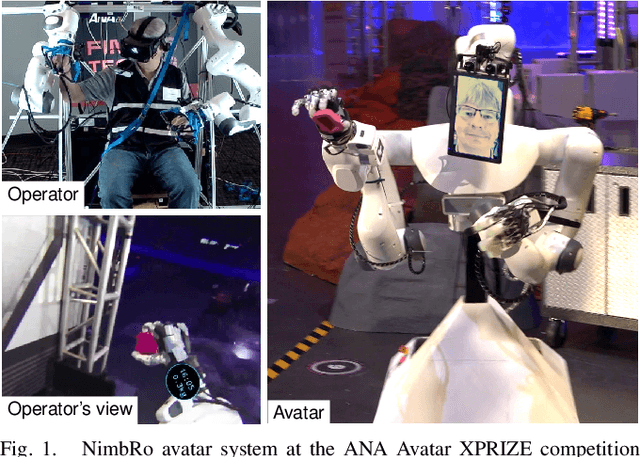

Robotic avatar systems promise to bridge distances and reduce the need for travel. We present the updated NimbRo avatar system, winner of the $5M grand prize at the international ANA Avatar XPRIZE competition, which required participants to build intuitive and immersive telepresence robots that could be operated by briefly trained operators. We describe key improvements for the finals compared to the system used in the semifinals: To operate without a power- and communications tether, we integrate a battery and a robust redundant wireless communication system. Video and audio data are compressed using low-latency HEVC and Opus codecs. We propose a new locomotion control device with tunable resistance force. To increase flexibility, the robot's upper-body height can be adjusted by the operator. We describe essential monitoring and robustness tools which enabled the success at the competition. Finally, we analyze our performance at the competition finals and discuss lessons learned.
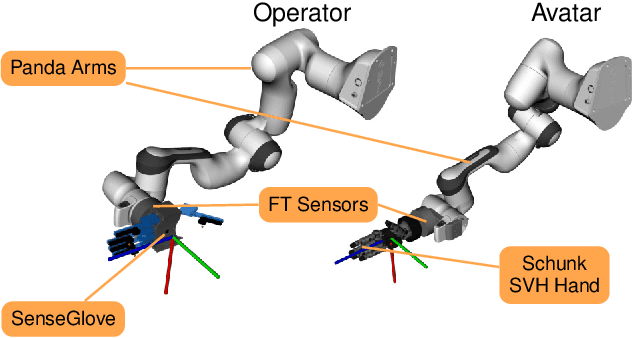
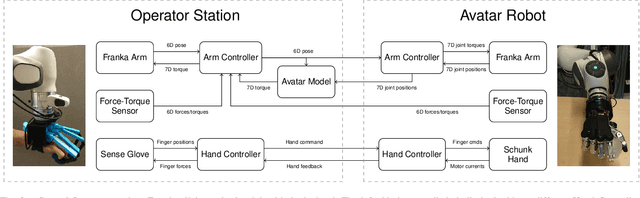
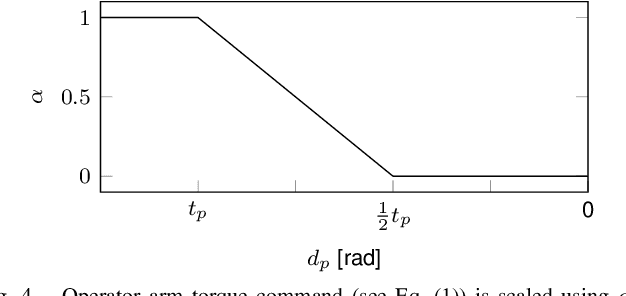
Bimanual Telemanipulation with Force and Haptic Feedback through an Anthropomorphic Avatar System
Jan 02, 2023Robotic teleoperation is a key technology for a wide variety of applications. It allows sending robots instead of humans in remote, possibly dangerous locations while still using the human brain with its enormous knowledge and creativity, especially for solving unexpected problems. A main challenge in teleoperation consists of providing enough feedback to the human operator for situation awareness and thus create full immersion, as well as offering the operator suitable control interfaces to achieve efficient and robust task fulfillment. We present a bimanual telemanipulation system consisting of an anthropomorphic avatar robot and an operator station providing force and haptic feedback to the human operator. The avatar arms are controlled in Cartesian space with a direct mapping of the operator movements. The measured forces and torques on the avatar side are haptically displayed to the operator. We developed a predictive avatar model for limit avoidance which runs on the operator side, ensuring low latency. The system was successfully evaluated during the ANA Avatar XPRIZE competition semifinals. In addition, we performed in lab experiments and carried out a small user study with mostly untrained operators.
NimbRo Avatar: Interactive Immersive Telepresence with Force-Feedback Telemanipulation
Sep 28, 2021
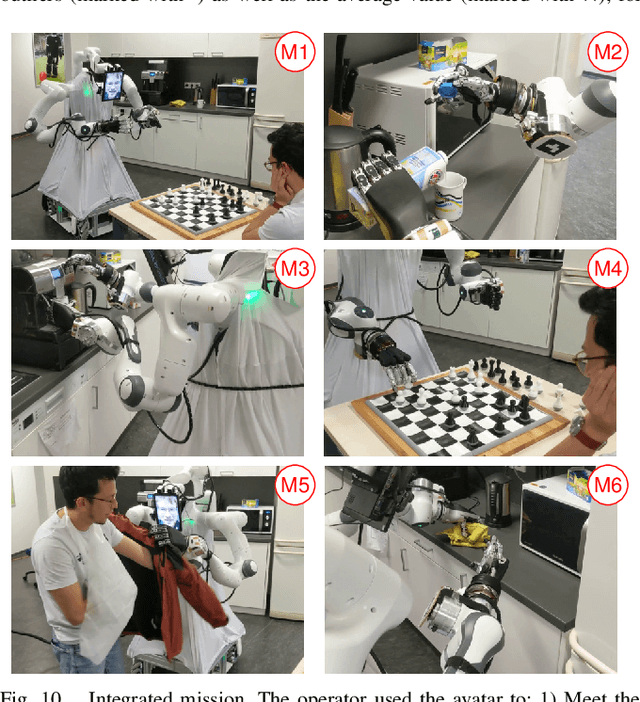
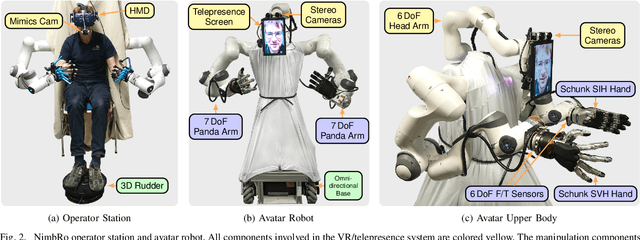
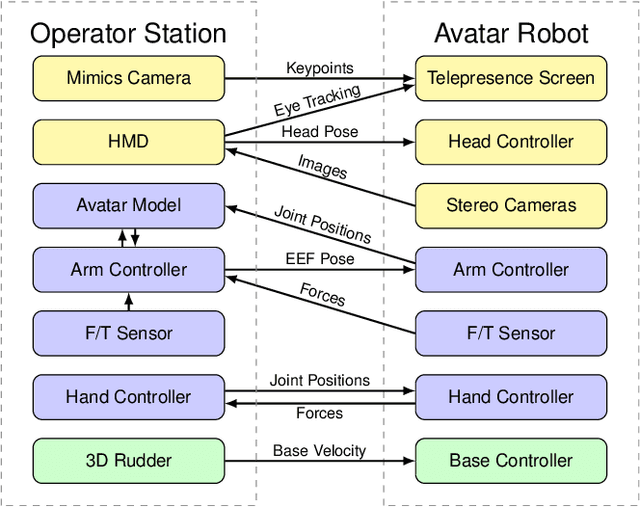
Robotic avatars promise immersive teleoperation with human-like manipulation and communication capabilities. We present such an avatar system, based on the key components of immersive 3D visualization and transparent force-feedback telemanipulation. Our avatar robot features an anthropomorphic bimanual arm configuration with dexterous hands. The remote human operator drives the arms and fingers through an exoskeleton-based operator station, which provides force feedback both at the wrist and for each finger. The robot torso is mounted on a holonomic base, providing locomotion capability in typical indoor scenarios, controlled using a 3D rudder device. Finally, the robot features a 6D movable head with stereo cameras, which stream images to a VR HMD worn by the operator. Movement latency is hidden using spherical rendering. The head also carries a telepresence screen displaying a synthesized image of the operator with facial animation, which enables direct interaction with remote persons. We evaluate our system successfully both in a user study with untrained operators as well as a longer and more complex integrated mission. We discuss lessons learned from the trials and possible improvements.
Bimanual Telemanipulation with Force and Haptic Feedback and Predictive Limit Avoidance
Sep 27, 2021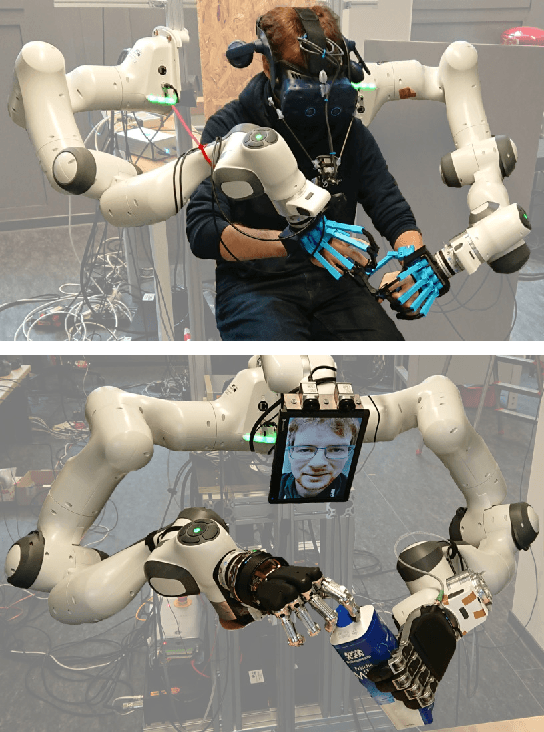
Robotic teleoperation is a key technology for a wide variety of applications. It allows sending robots instead of humans in remote, possibly dangerous locations while still using the human brain with its enormous knowledge and creativity, especially for solving unexpected problems. A main challenge in teleoperation consists of providing enough feedback to the human operator for situation awareness and thus create full immersion, as well as offering the operator suitable control interfaces to achieve efficient and robust task fulfillment. We present a bimanual telemanipulation system consisting of an anthropomorphic avatar robot and an operator station providing force and haptic feedback to the human operator. The avatar arms are controlled in Cartesian space with a 1:1 mapping of the operator movements. The measured forces and torques on the avatar side are haptically displayed directly to the operator. We developed a predictive avatar model for limit avoidance which runs on the operator side, ensuring low latency. Only off-the-shelf components were used to build the system. It is evaluated in lab experiments and by untrained operators in a small user study.
Autonomous Fire Fighting with a UAV-UGV Team at MBZIRC 2020
Jun 11, 2021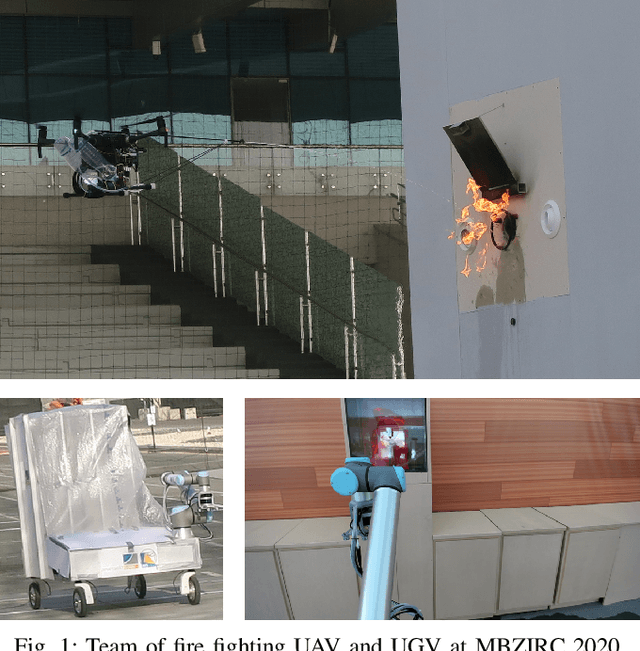
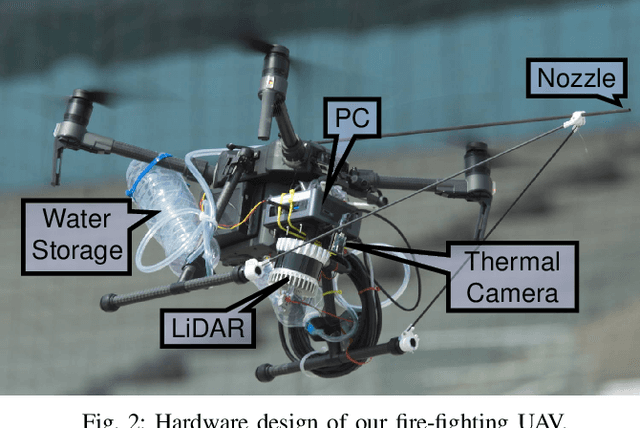
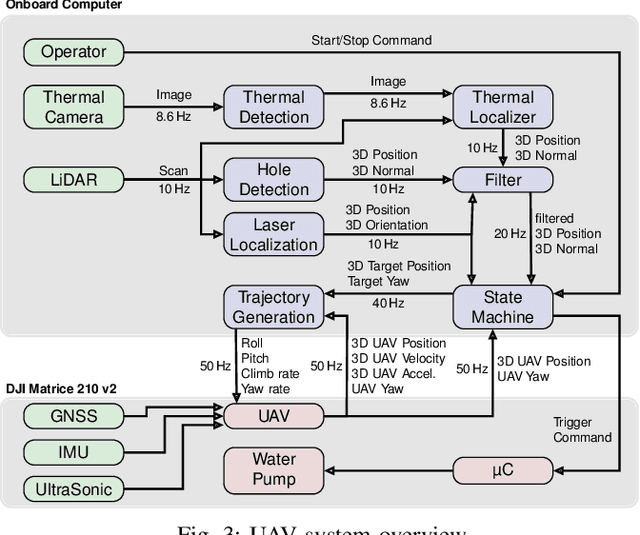
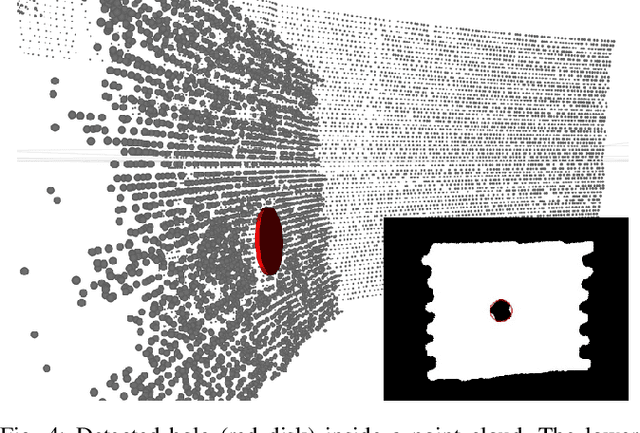
Every day, burning buildings threaten the lives of occupants and first responders trying to save them. Quick action is of essence, but some areas might not be accessible or too dangerous to enter. Robotic systems have become a promising addition to firefighting, but at this stage, they are mostly manually controlled, which is error-prone and requires specially trained personal. We present two systems for autonomous firefighting from air and ground we developed for the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020. The systems use LiDAR for reliable localization within narrow, potentially GNSS-restricted environments while maneuvering close to obstacles. Measurements from LiDAR and thermal cameras are fused to track fires, while relative navigation ensures successful extinguishing. We analyze and discuss our successful participation during the MBZIRC 2020, present further experiments, and provide insights into our lessons learned from the competition.
Team NimbRo's UGV Solution for Autonomous Wall Building and Fire Fighting at MBZIRC 2020
May 27, 2021
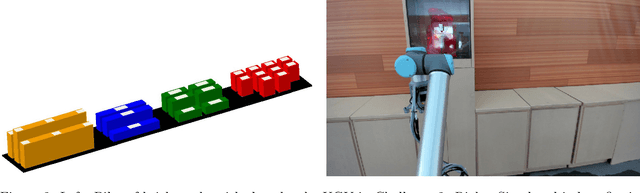
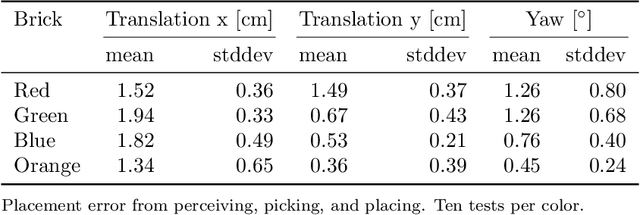
Autonomous robotic systems for various applications including transport, mobile manipulation, and disaster response are becoming more and more complex. Evaluating and analyzing such systems is challenging. Robotic competitions are designed to benchmark complete robotic systems on complex state-of-the-art tasks. Participants compete in defined scenarios under equal conditions. We present our UGV solution developed for the Mohamed Bin Zayed International Robotics Challenge 2020. Our hard- and software components to address the challenge tasks of wall building and fire fighting are integrated into a fully autonomous system. The robot consists of a wheeled omnidirectional base, a 6 DoF manipulator arm equipped with a magnetic gripper, a highly efficient storage system to transport box-shaped objects, and a water spraying system to fight fires. The robot perceives its environment using 3D LiDAR as well as RGB and thermal camera-based perception modules, is capable of picking box-shaped objects and constructing a pre-defined wall structure, as well as detecting and localizing heat sources in order to extinguish potential fires. A high-level planner solves the challenge tasks using the robot skills. We analyze and discuss our successful participation during the MBZIRC 2020 finals, present further experiments, and provide insights to our lessons learned.