 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRendering the Directional TSDF for Tracking and Multi-Sensor Registration with Point-To-Plane Scale ICP
Jan 30, 2023Dense real-time tracking and mapping from RGB-D images is an important tool for many robotic applications, such as navigation and manipulation. The recently presented Directional Truncated Signed Distance Function (DTSDF) is an augmentation of the regular TSDF that shows potential for more coherent maps and improved tracking performance. In this work, we present methods for rendering depth- and color images from the DTSDF, making it a true drop-in replacement for the regular TSDF in established trackers. We evaluate the algorithm on well-established datasets and observe that our method improves tracking performance and increases re-usability of mapped scenes. Furthermore, we add color integration which notably improves color-correctness at adjacent surfaces. Our novel formulation of combined ICP with frame-to-keyframe photometric error minimization further improves tracking results. Lastly, we introduce Sim3 point-to-plane ICP for refining pose priors in a multi-sensor scenario with different scale factors.
Target Chase, Wall Building, and Fire Fighting: Autonomous UAVs of Team NimbRo at MBZIRC 2020
Jan 11, 2022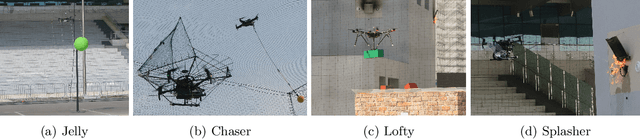

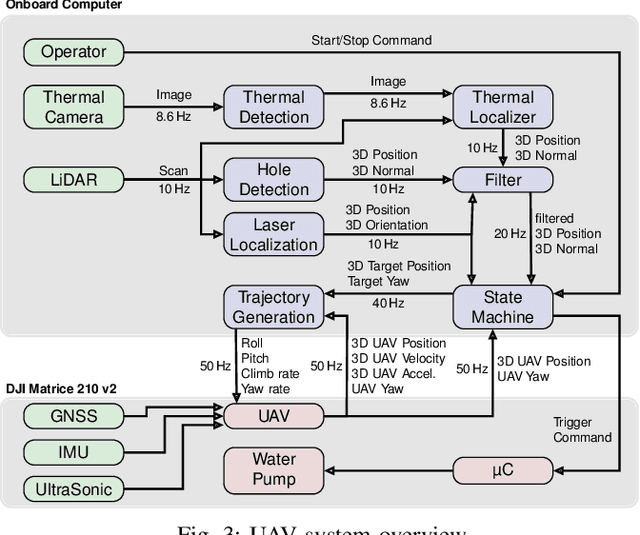
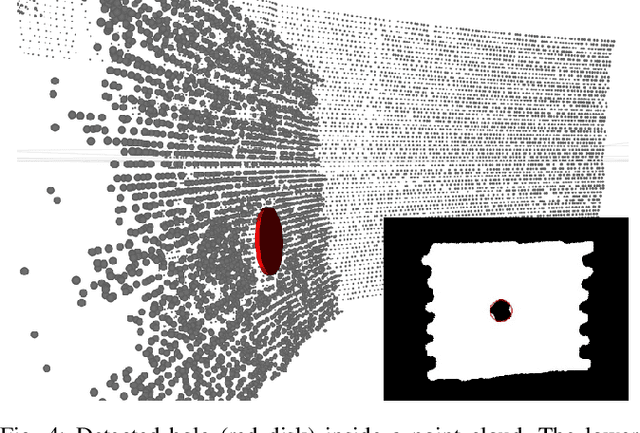
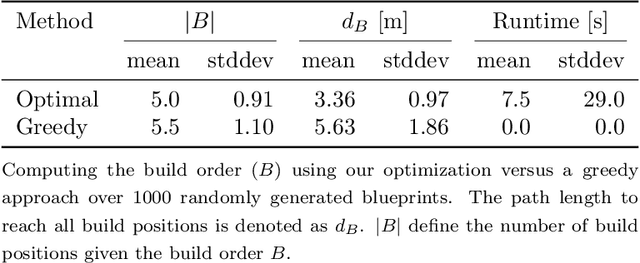
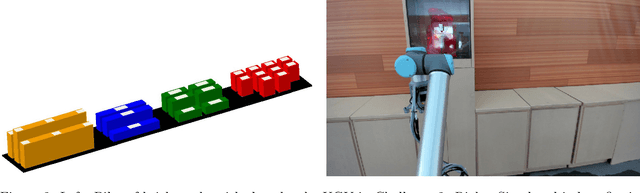
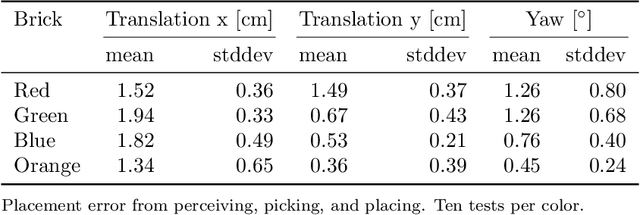
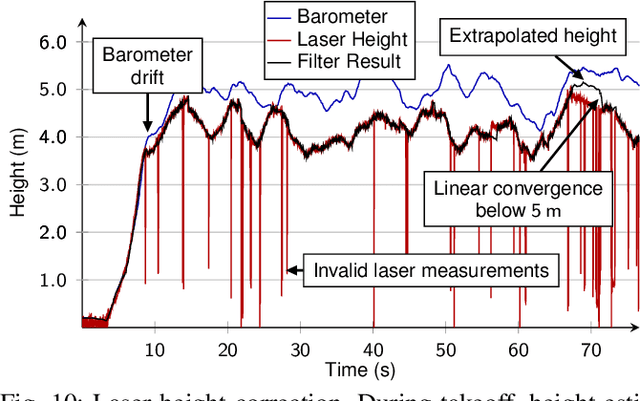
The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020 posed diverse challenges for unmanned aerial vehicles (UAVs). We present our four tailored UAVs, specifically developed for individual aerial-robot tasks of MBZIRC, including custom hardware- and software components. In Challenge 1, a target UAV is pursued using a high-efficiency, onboard object detection pipeline to capture a ball from the target UAV. A second UAV uses a similar detection method to find and pop balloons scattered throughout the arena. For Challenge 2, we demonstrate a larger UAV capable of autonomous aerial manipulation: Bricks are found and tracked from camera images. Subsequently, they are approached, picked, transported, and placed on a wall. Finally, in Challenge 3, our UAV autonomously finds fires using LiDAR and thermal cameras. It extinguishes the fires with an onboard fire extinguisher. While every robot features task-specific subsystems, all UAVs rely on a standard software stack developed for this particular and future competitions. We present our mostly open-source software solutions, including tools for system configuration, monitoring, robust wireless communication, high-level control, and agile trajectory generation. For solving the MBZIRC 2020 tasks, we advanced the state of the art in multiple research areas like machine vision and trajectory generation. We present our scientific contributions that constitute the foundation for our algorithms and systems and analyze the results from the MBZIRC competition 2020 in Abu Dhabi, where our systems reached second place in the Grand Challenge. Furthermore, we discuss lessons learned from our participation in this complex robotic challenge.
Rendering and Tracking the Directional TSDF: Modeling Surface Orientation for Coherent Maps
Aug 18, 2021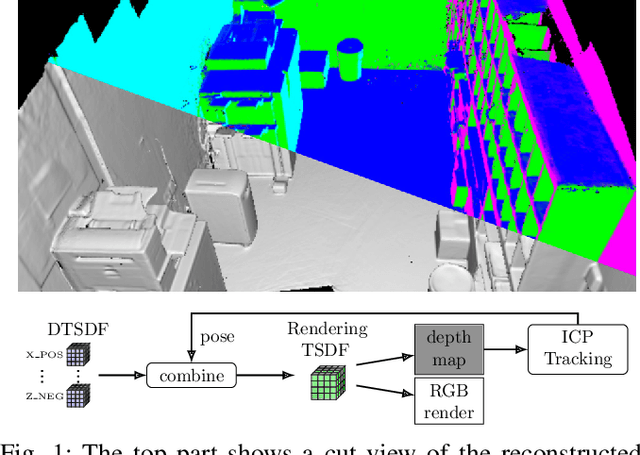

Dense real-time tracking and mapping from RGB-D images is an important tool for many robotic applications, such as navigation or grasping. The recently presented Directional Truncated Signed Distance Function (DTSDF) is an augmentation of the regular TSDF and shows potential for more coherent maps and improved tracking performance. In this work, we present methods for rendering depth- and color maps from the DTSDF, making it a true drop-in replacement for the regular TSDF in established trackers. We evaluate and show, that our method increases re-usability of mapped scenes. Furthermore, we add color integration which notably improves color-correctness at adjacent surfaces.
Autonomous Fire Fighting with a UAV-UGV Team at MBZIRC 2020
Jun 11, 2021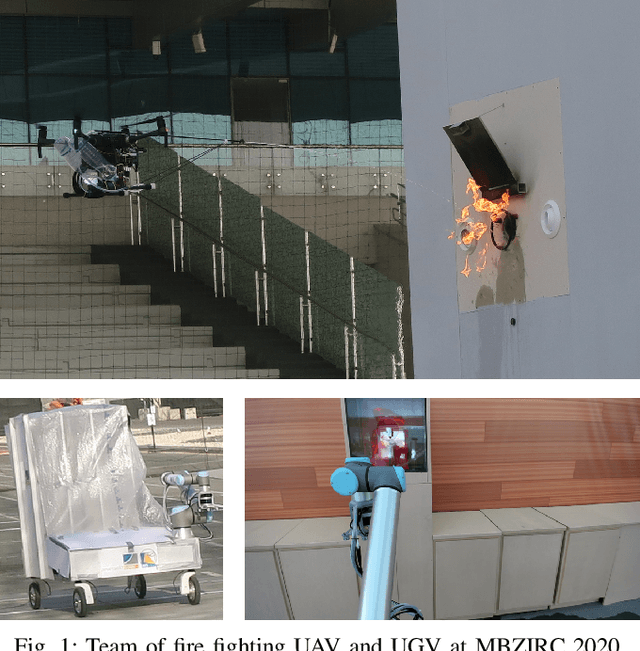
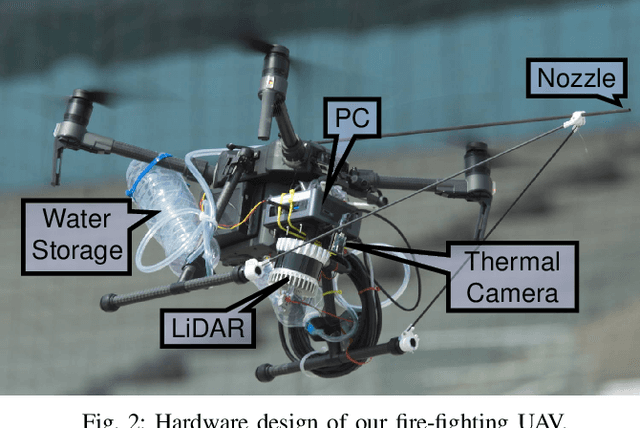
Every day, burning buildings threaten the lives of occupants and first responders trying to save them. Quick action is of essence, but some areas might not be accessible or too dangerous to enter. Robotic systems have become a promising addition to firefighting, but at this stage, they are mostly manually controlled, which is error-prone and requires specially trained personal. We present two systems for autonomous firefighting from air and ground we developed for the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020. The systems use LiDAR for reliable localization within narrow, potentially GNSS-restricted environments while maneuvering close to obstacles. Measurements from LiDAR and thermal cameras are fused to track fires, while relative navigation ensures successful extinguishing. We analyze and discuss our successful participation during the MBZIRC 2020, present further experiments, and provide insights into our lessons learned from the competition.
Team NimbRo's UGV Solution for Autonomous Wall Building and Fire Fighting at MBZIRC 2020
May 27, 2021
Autonomous robotic systems for various applications including transport, mobile manipulation, and disaster response are becoming more and more complex. Evaluating and analyzing such systems is challenging. Robotic competitions are designed to benchmark complete robotic systems on complex state-of-the-art tasks. Participants compete in defined scenarios under equal conditions. We present our UGV solution developed for the Mohamed Bin Zayed International Robotics Challenge 2020. Our hard- and software components to address the challenge tasks of wall building and fire fighting are integrated into a fully autonomous system. The robot consists of a wheeled omnidirectional base, a 6 DoF manipulator arm equipped with a magnetic gripper, a highly efficient storage system to transport box-shaped objects, and a water spraying system to fight fires. The robot perceives its environment using 3D LiDAR as well as RGB and thermal camera-based perception modules, is capable of picking box-shaped objects and constructing a pre-defined wall structure, as well as detecting and localizing heat sources in order to extinguish potential fires. A high-level planner solves the challenge tasks using the robot skills. We analyze and discuss our successful participation during the MBZIRC 2020 finals, present further experiments, and provide insights to our lessons learned.
Visually Guided Balloon Popping with an Autonomous MAV at MBZIRC 2020
Oct 28, 2020
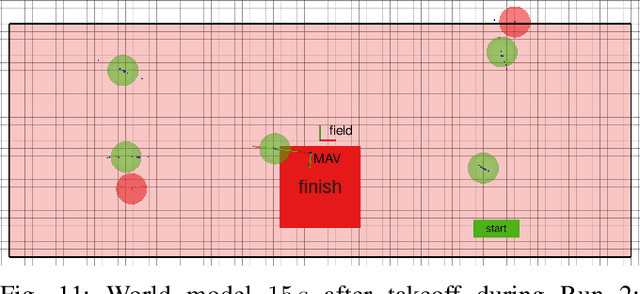
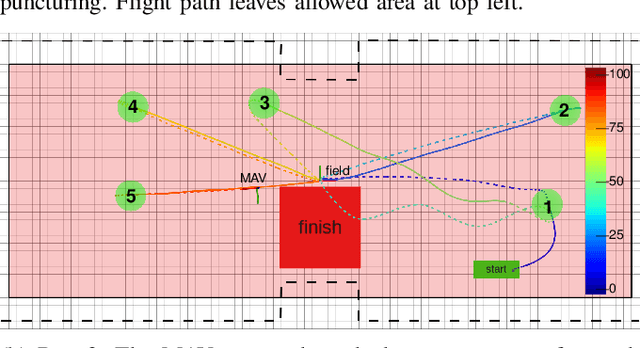
Visually guided control of micro aerial vehicles (MAV) demands for robust real-time perception, fast trajectory generation, and a capable flight platform. We present a fully autonomous MAV that is able to pop balloons, relying only on onboard sensing and computing. The system is evaluated with real robot experiments during the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020 where it showed its resilience and speed. In all three competition runs we were able to pop all five balloons in less than two minutes flight time with a single MAV.
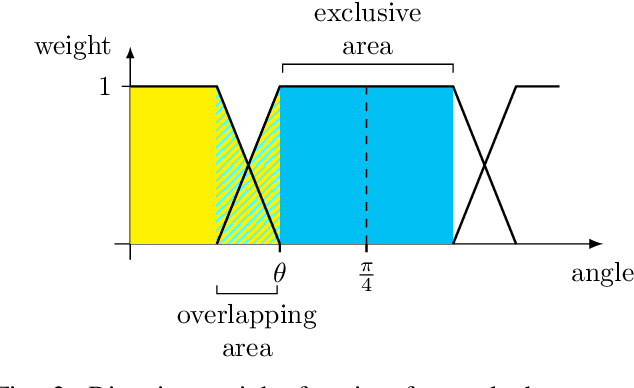
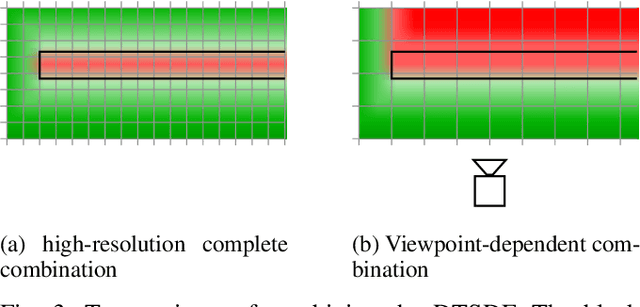
Directional TSDF: Modeling Surface Orientation for Coherent Meshes
Aug 14, 2019

Real-time 3D reconstruction from RGB-D sensor data plays an important role in many robotic applications, such as object modeling and mapping. The popular method of fusing depth information into a truncated signed distance function (TSDF) and applying the marching cubes algorithm for mesh extraction has severe issues with thin structures: not only does it lead to loss of accuracy, but it can generate completely wrong surfaces. To address this, we propose the directional TSDF - a novel representation that stores opposite surfaces separate from each other. The marching cubes algorithm is modified accordingly to retrieve a coherent mesh representation. We further increase the accuracy by using surface gradient-based ray casting for fusing new measurements. We show that our method outperforms state-of-the-art TSDF reconstruction algorithms in mesh accuracy.
* For supplementary material and videos, see this http://www.ais.uni-bonn.de/videos/IROS_2019_Splietker/