 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeel the Tension: Manipulation of Deformable Linear Objects in Environments with Fixtures using Force Information
Oct 10, 2023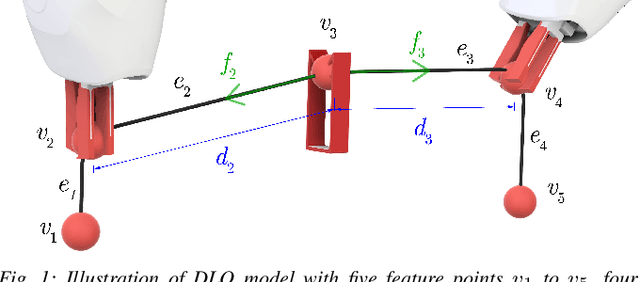
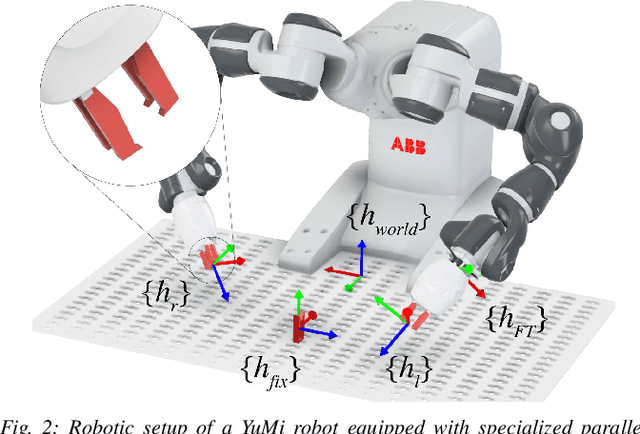
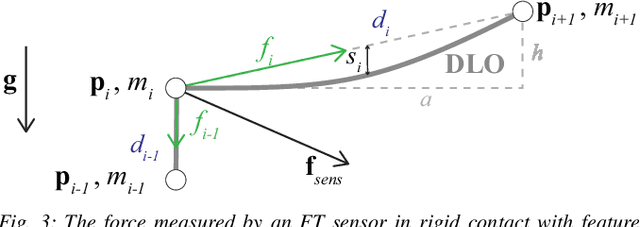
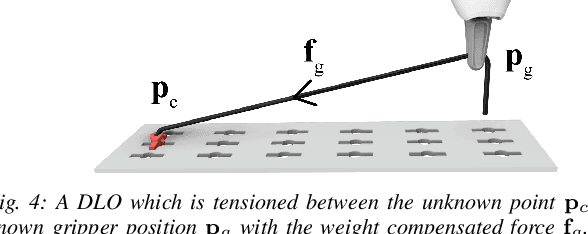
Humans are able to manipulate Deformable Linear Objects (DLOs) such as cables and wires, with little or no visual information, relying mostly on force sensing. In this work, we propose a reduced DLO model which enables such blind manipulation by keeping the object under tension. Further, an online model estimation procedure is also proposed. A set of elementary sliding and clipping manipulation primitives are defined based on our model. The combination of these primitives allows for more complex motions such as winding of a DLO. The model estimation and manipulation primitives are tested individually but also together in a real-world cable harness production task, using a dual-arm YuMi, thus demonstrating that force-based perception can be sufficient even for such a complex scenario.
Target Chase, Wall Building, and Fire Fighting: Autonomous UAVs of Team NimbRo at MBZIRC 2020
Jan 11, 2022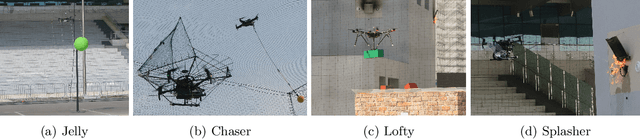
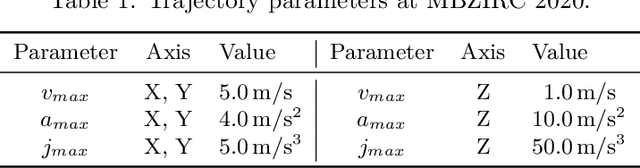
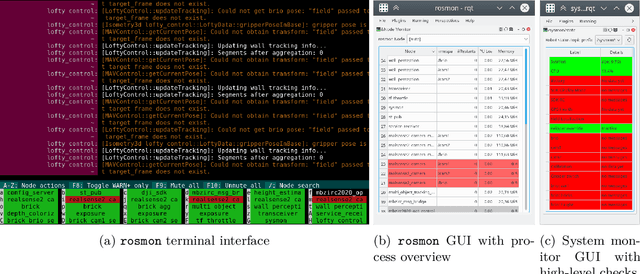

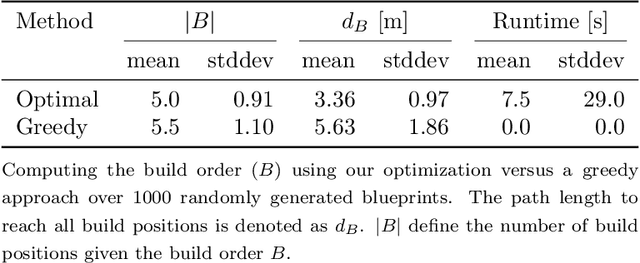
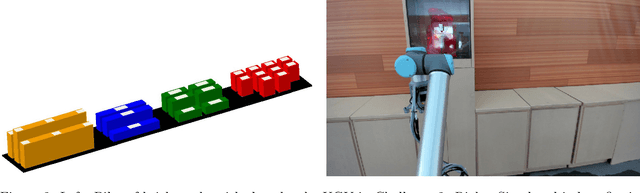
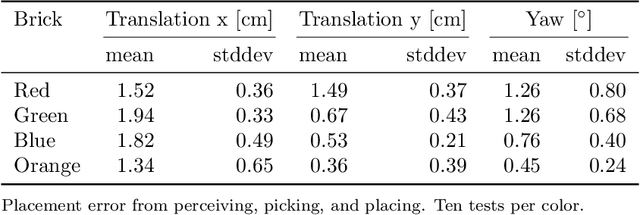
The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020 posed diverse challenges for unmanned aerial vehicles (UAVs). We present our four tailored UAVs, specifically developed for individual aerial-robot tasks of MBZIRC, including custom hardware- and software components. In Challenge 1, a target UAV is pursued using a high-efficiency, onboard object detection pipeline to capture a ball from the target UAV. A second UAV uses a similar detection method to find and pop balloons scattered throughout the arena. For Challenge 2, we demonstrate a larger UAV capable of autonomous aerial manipulation: Bricks are found and tracked from camera images. Subsequently, they are approached, picked, transported, and placed on a wall. Finally, in Challenge 3, our UAV autonomously finds fires using LiDAR and thermal cameras. It extinguishes the fires with an onboard fire extinguisher. While every robot features task-specific subsystems, all UAVs rely on a standard software stack developed for this particular and future competitions. We present our mostly open-source software solutions, including tools for system configuration, monitoring, robust wireless communication, high-level control, and agile trajectory generation. For solving the MBZIRC 2020 tasks, we advanced the state of the art in multiple research areas like machine vision and trajectory generation. We present our scientific contributions that constitute the foundation for our algorithms and systems and analyze the results from the MBZIRC competition 2020 in Abu Dhabi, where our systems reached second place in the Grand Challenge. Furthermore, we discuss lessons learned from our participation in this complex robotic challenge.
Team NimbRo's UGV Solution for Autonomous Wall Building and Fire Fighting at MBZIRC 2020
May 27, 2021
Autonomous robotic systems for various applications including transport, mobile manipulation, and disaster response are becoming more and more complex. Evaluating and analyzing such systems is challenging. Robotic competitions are designed to benchmark complete robotic systems on complex state-of-the-art tasks. Participants compete in defined scenarios under equal conditions. We present our UGV solution developed for the Mohamed Bin Zayed International Robotics Challenge 2020. Our hard- and software components to address the challenge tasks of wall building and fire fighting are integrated into a fully autonomous system. The robot consists of a wheeled omnidirectional base, a 6 DoF manipulator arm equipped with a magnetic gripper, a highly efficient storage system to transport box-shaped objects, and a water spraying system to fight fires. The robot perceives its environment using 3D LiDAR as well as RGB and thermal camera-based perception modules, is capable of picking box-shaped objects and constructing a pre-defined wall structure, as well as detecting and localizing heat sources in order to extinguish potential fires. A high-level planner solves the challenge tasks using the robot skills. We analyze and discuss our successful participation during the MBZIRC 2020 finals, present further experiments, and provide insights to our lessons learned.