 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFriction Estimation for In-Hand Planar Motion
Jul 09, 2025This paper presents a method for online estimation of contact properties during in-hand sliding manipulation with a parallel gripper. We estimate the static and Coulomb friction as well as the contact radius from tactile measurements of contact forces and sliding velocities. The method is validated in both simulation and real-world experiments. Furthermore, we propose a heuristic to deal with fast slip-stick dynamics which can adversely affect the estimation.
Perception, Control and Hardware for In-Hand Slip-Aware Object Manipulation with Parallel Grippers
Oct 25, 2024



Dexterous in-hand manipulation offers significant potential to enhance robotic manipulator capabilities. This paper presents a comprehensive study on custom sensors and parallel gripper hardware specifically designed for in-hand slippage control. The gripper features rapid closed-loop, low-level force control, and is equipped with sensors capable of independently measuring contact forces and sliding velocities. Our system can quickly estimate essential object properties during pick-up using only in-hand sensing, without relying on prior object information. We introduce four distinct slippage controllers: gravity-assisted trajectory following for both rotational and linear slippage, a hinge controller that maintains the object's orientation while the gripper rotates, and a slip-avoidance controller. The system is mounted on a robot arm and validated through extensive experiments involving a diverse range of objects, demonstrating its novel capabilities.
Offline Goal-Conditioned Reinforcement Learning for Shape Control of Deformable Linear Objects
Mar 15, 2024Deformable objects present several challenges to the field of robotic manipulation. One of the tasks that best encapsulates the difficulties arising due to non-rigid behavior is shape control, which requires driving an object to a desired shape. While shape-servoing methods have been shown successful in contexts with approximately linear behavior, they can fail in tasks with more complex dynamics. We investigate an alternative approach, using offline RL to solve a planar shape control problem of a Deformable Linear Object (DLO). To evaluate the effect of material properties, two DLOs are tested namely a soft rope and an elastic cord. We frame this task as a goal-conditioned offline RL problem, and aim to learn to generalize to unseen goal shapes. Data collection and augmentation procedures are proposed to limit the amount of experimental data which needs to be collected with the real robot. We evaluate the amount of augmentation needed to achieve the best results, and test the effect of regularization through behavior cloning on the TD3+BC algorithm. Finally, we show that the proposed approach is able to outperform a shape-servoing baseline in a curvature inversion experiment.
Feel the Tension: Manipulation of Deformable Linear Objects in Environments with Fixtures using Force Information
Oct 10, 2023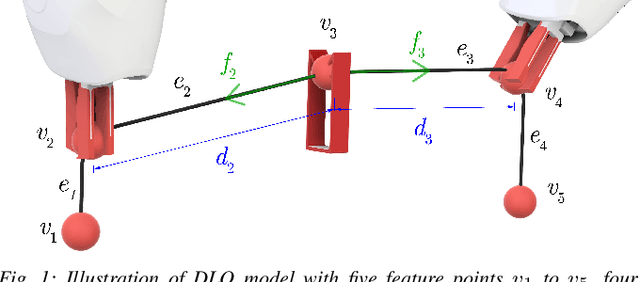
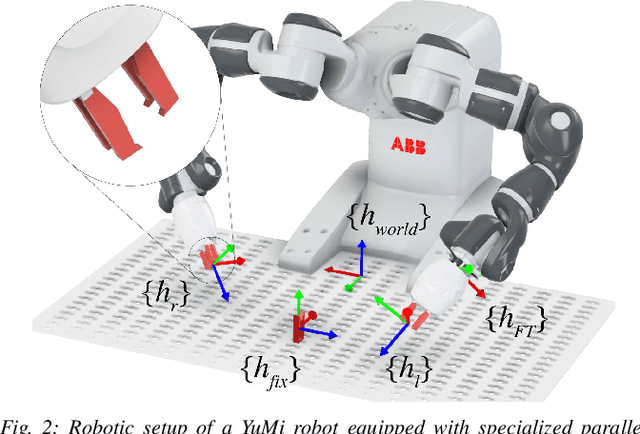
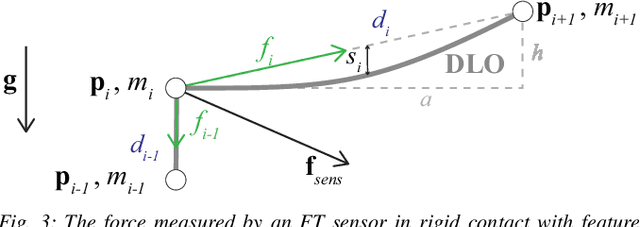
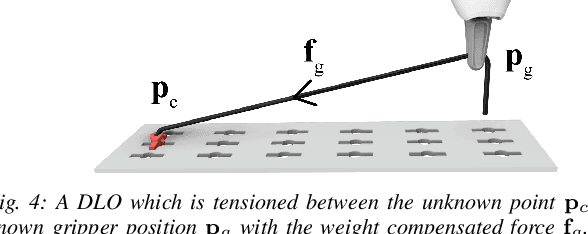
Humans are able to manipulate Deformable Linear Objects (DLOs) such as cables and wires, with little or no visual information, relying mostly on force sensing. In this work, we propose a reduced DLO model which enables such blind manipulation by keeping the object under tension. Further, an online model estimation procedure is also proposed. A set of elementary sliding and clipping manipulation primitives are defined based on our model. The combination of these primitives allows for more complex motions such as winding of a DLO. The model estimation and manipulation primitives are tested individually but also together in a real-world cable harness production task, using a dual-arm YuMi, thus demonstrating that force-based perception can be sufficient even for such a complex scenario.
Planar Friction Modelling with LuGre Dynamics and Limit Surfaces
Aug 02, 2023Contact surfaces in planar motion exhibit a coupling between tangential and rotational friction forces. This paper proposes planar friction models grounded in the LuGre model and limit surface theory. First, distributed planar extended state models are proposed and the Elasto-Plastic model is extended for multi-dimensional friction. Subsequently, we derive a reduced planar friction model, coupled with a pre-calculated limit surface, that offers reduced computational cost. The limit surface approximation through an ellipsoid is discussed. The properties of the planar friction models are assessed in various simulations, demonstrating that the reduced planar friction model achieves comparable performance to the distributed model while exhibiting ~80 times lower computational cost.
Robotic Navigation with Convergence Guarantees in Complex Dynamic Environments
Jun 21, 2023This article addresses the obstacle avoidance problem for setpoint stabilization and path-following tasks in complex dynamic 2-D environments that go beyond conventional scenes with isolated convex obstacles. A combined motion planner and controller is proposed for setpoint stabilization that integrates the favorable convergence characteristics of closed-form motion planning techniques with the intuitive representation of system constraints through Model Predictive Control (MPC). The method is analytically proven to accomplish collision avoidance and convergence under soft conditions, and it is extended to path-following control. Various simulation scenarios using a non-holonomic unicycle robot are provided to showcase the efficacy of the control scheme and its improved convergence results compared to standard path-following MPC approaches with obstacle avoidance.
Obstacle Avoidance in Dynamic Environments via Tunnel-following MPC with Adaptive Guiding Vector Fields
Mar 28, 2023This paper proposes a motion control scheme for robots operating in a dynamic environment with concave obstacles. A Model Predictive Controller (MPC) is constructed to drive the robot towards a goal position while ensuring collision avoidance without direct use of obstacle information in the optimization problem. This is achieved by guaranteeing tracking performance of an appropriately designed receding horizon path. The path is computed using a guiding vector field defined in a subspace of the free workspace where each point in the subspace satisfies a criteria for minimum distance to all obstacles. The effectiveness of the control scheme is illustrated by means of simulation.
Learning Shape Control of Elastoplastic Deformable Linear Objects
Aug 03, 2022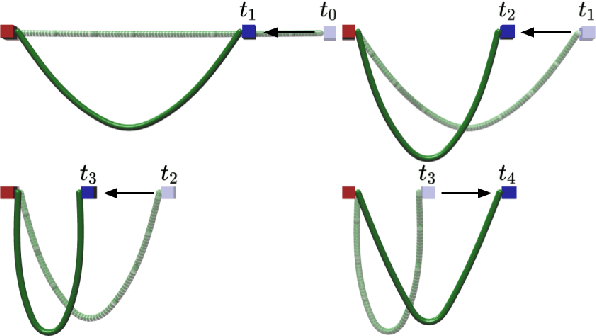
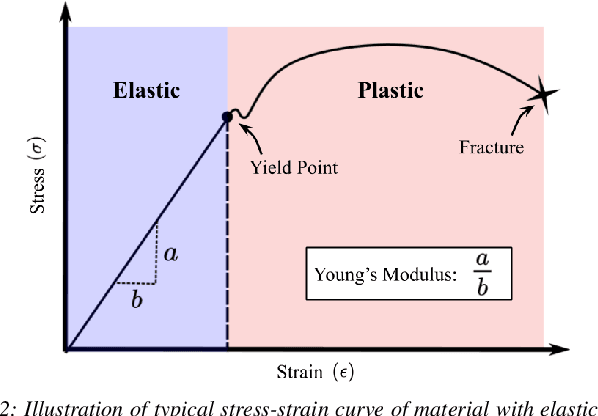
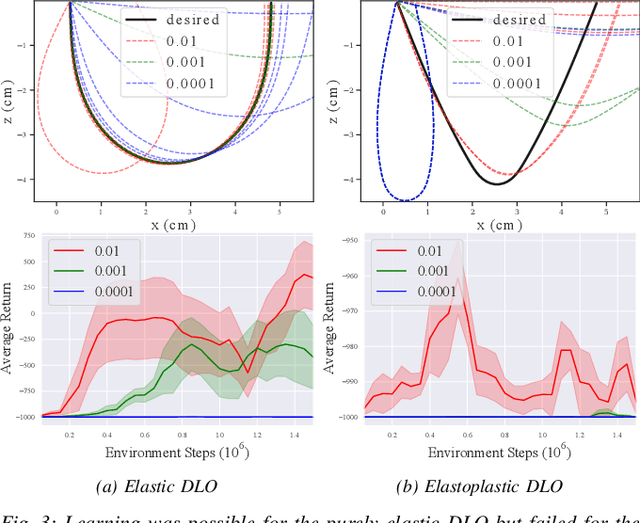
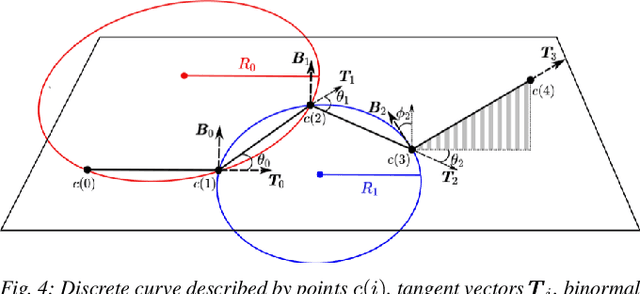
Deformable object manipulation tasks have long been regarded as challenging robotic problems. However, until recently very little work has been done on the subject, with most robotic manipulation methods being developed for rigid objects. Deformable objects are more difficult to model and simulate, which has limited the use of model-free Reinforcement Learning (RL) strategies, due to their need for large amounts of data that can only be satisfied in simulation. This paper proposes a new shape control task for Deformable Linear Objects (DLOs). More notably, we present the first study on the effects of elastoplastic properties on this type of problem. Objects with elastoplasticity such as metal wires, are found in various applications and are challenging to manipulate due to their nonlinear behavior. We first highlight the challenges of solving such a manipulation task from an RL perspective, particularly in defining the reward. Then, based on concepts from differential geometry, we propose an intrinsic shape representation using discrete curvature and torsion. Finally, we show through an empirical study that in order to successfully solve the proposed task using Deep Deterministic Policy Gradient (DDPG), the reward needs to include intrinsic information about the shape of the DLO.
Creating Star Worlds -- Modelling Concave Obstacles for Reactive Motion Planning
May 19, 2022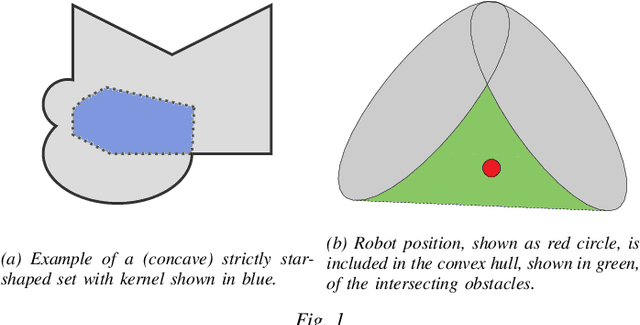


Motion planning methods like navigation functions and harmonic potential fields provide (almost) global convergence and are suitable for obstacle avoidance in dynamically changing environments due to their reactive nature. A common assumption in the control design is that the robot operates in a disjoint star world, i.e. all obstacles are strictly starshaped and mutually disjoint. However, in real-life scenarios obstacles may intersect due to expanded obstacle regions corresponding to robot radius or safety margins. To broaden the applicability of aforementioned reactive motion planning methods, we propose a method to transform a workspace of intersecting obstacles to a disjoint star world. The algorithm is based on two novel concepts presented here, namely admissible kernel and starshaped hull with specified kernel, which are closely related to the notion of starshaped hull. The utilization of the proposed method is illustrated with examples of a robot operating in a 2D workspace using a harmonic potential field approach in combination with the developed algorithm.
A Survey of Robot Manipulation in Contact
Dec 03, 2021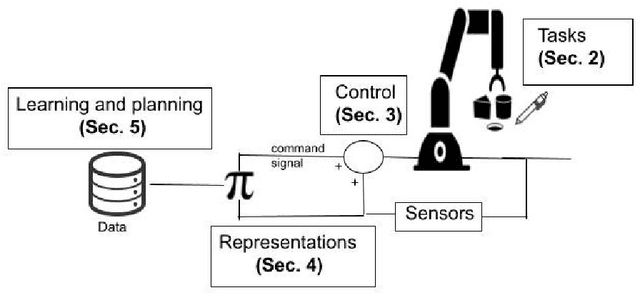
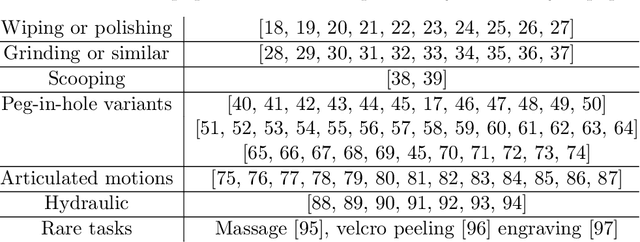
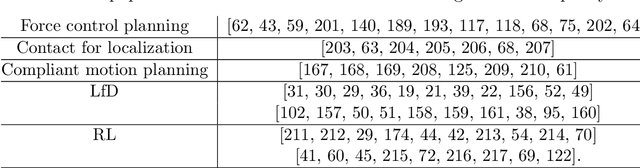
In this survey we present the current status on robots performing manipulation tasks that require varying contact with the environment, such that the robot must either implicitly or explicitly control the contact force with the environment to complete the task. Robots can perform more and more manipulation tasks that are still done by humans, and there is a growing number of publications on the topics of 1) performing tasks that always require contact and 2) mitigating uncertainty by leveraging the environment in tasks that, under perfect information, could be performed without contact. The recent trends have seen robots perform tasks earlier left for humans, such as massage, and in the classical tasks, such as peg-in-hole, there is more efficient generalization to other similar tasks, better error tolerance, and faster planning or learning of the tasks. Thus, in this survey we cover the current stage of robots performing such tasks, starting from surveying all the different in-contact tasks robots can perform, observing how these tasks are controlled and represented, and finally presenting the learning and planning of the skills required to complete these tasks.