 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Robot Manipulation in Contact
Paper and Code
Dec 03, 2021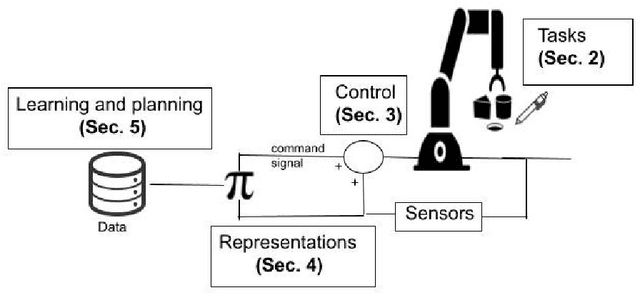
In this survey we present the current status on robots performing manipulation tasks that require varying contact with the environment, such that the robot must either implicitly or explicitly control the contact force with the environment to complete the task. Robots can perform more and more manipulation tasks that are still done by humans, and there is a growing number of publications on the topics of 1) performing tasks that always require contact and 2) mitigating uncertainty by leveraging the environment in tasks that, under perfect information, could be performed without contact. The recent trends have seen robots perform tasks earlier left for humans, such as massage, and in the classical tasks, such as peg-in-hole, there is more efficient generalization to other similar tasks, better error tolerance, and faster planning or learning of the tasks. Thus, in this survey we cover the current stage of robots performing such tasks, starting from surveying all the different in-contact tasks robots can perform, observing how these tasks are controlled and represented, and finally presenting the learning and planning of the skills required to complete these tasks.