 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot and Overhead Crane Collaboration Scheme to Enhance Payload Manipulation
Aug 11, 2025This paper presents a scheme to enhance payload manipulation using a robot collaborating with an overhead crane. In the current industrial practice, when the crane's payload has to be accurately manipulated and located in a desired position, the task becomes laborious and risky since the operators have to guide the fine motions of the payload by hand. In the proposed collaborative scheme, the crane lifts the payload while the robot's end-effector guides it toward the desired position. The only link between the robot and the crane is the interaction force produced during the guiding of the payload. Two admittance transfer functions are considered to accomplish harmless and smooth contact with the payload. The first is used in a position-based admittance control integrated with the robot. The second one adds compliance to the crane by processing the interaction force through the admittance transfer function to generate a crane's velocity command that makes the crane follow the payload. Then the robot's end-effector and the crane move collaboratively to guide the payload to the desired location. A method is presented to design the admittance controllers that accomplish a fluent robot-crane collaboration. Simulations and experiments validating the scheme potential are shown.
Data Driven Approach to Input Shaping for Vibration Suppression in a Flexible Robot Arm
Jun 17, 2025This paper presents a simple and effective method for setting parameters for an input shaper to suppress the residual vibrations in flexible robot arms using a data-driven approach. The parameters are adaptively tuned in the workspace of the robot by interpolating previously measured data of the robot's residual vibrations. Input shaping is a simple and robust technique to generate vibration-reduced shaped commands by a convolution of an impulse sequence with the desired input command. The generated impulses create waves in the material countering the natural vibrations of the system. The method is demonstrated with a flexible 3D-printed robot arm with multiple different materials, achieving a significant reduction in the residual vibrations.
* 6 pages, 11 figures, robosoft2025 conference
Visual Servoing Based on 3D Features: Design and Implementation for Robotic Insertion Tasks
May 29, 2024This paper proposes a feature-based Visual Servoing (VS) method for insertion task skills. A camera mounted on the robot's end-effector provides the pose relative to a cylinder (hole), allowing a contact-free and damage-free search of the hole and avoiding uncertainties emerging when the pose is computed via robot kinematics. Two points located on the hole's principal axis and three mutually orthogonal planes defining the flange's reference frame are associated with the pose of the hole and the flange, respectively. The proposed VS drives to zero the distance between the two points and the three planes aligning the robot's flange with the hole's direction. Compared with conventional VS where the Jacobian is difficult to compute in practice, the proposed featured-based uses a Jacobian easily calculated from the measured hole pose. Furthermore, the feature-based VS design considers the robot's maximum cartesian velocity. The VS method is implemented in an industrial robot and the experimental results support its usefulness.
Leaning-Based Control of an Immersive-Telepresence Robot
Aug 22, 2022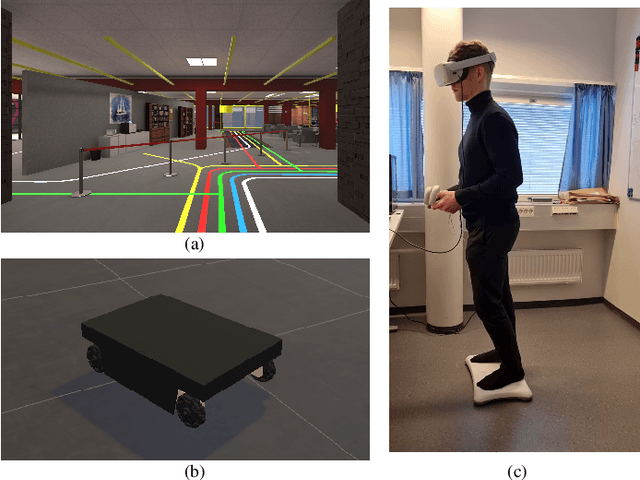

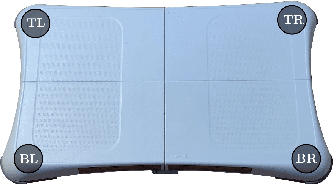
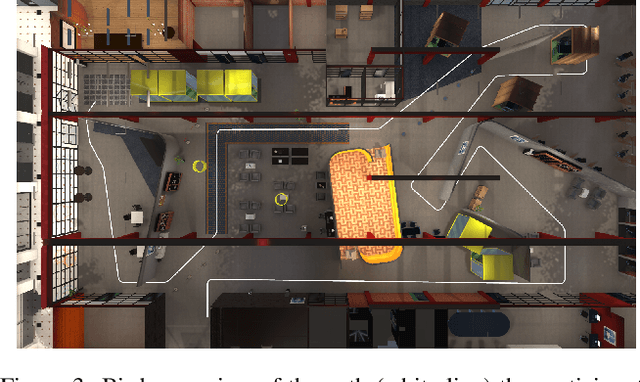
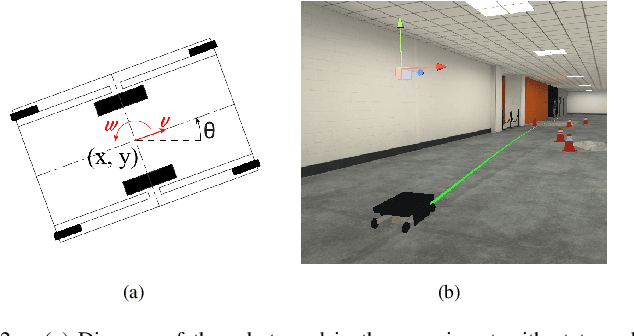
In this paper, we present an implementation of a leaning-based control of a differential drive telepresence robot and a user study in simulation, with the goal of bringing the same functionality to a real telepresence robot. The participants used a balance board to control the robot and viewed the virtual environment through a head-mounted display. The main motivation for using a balance board as the control device stems from Virtual Reality (VR) sickness; even small movements of your own body matching the motions seen on the screen decrease the sensory conflict between vision and vestibular organs, which lies at the heart of most theories regarding the onset of VR sickness. To test the hypothesis that the balance board as a control method would be less sickening than using joysticks, we designed a user study (N=32, 15 women) in which the participants drove a simulated differential drive robot in a virtual environment with either a Nintendo Wii Balance Board or joysticks. However, our pre-registered main hypotheses were not supported; the joystick did not cause any more VR sickness on the participants than the balance board, and the board proved to be statistically significantly more difficult to use, both subjectively and objectively. Analyzing the open-ended questions revealed these results to be likely connected, meaning that the difficulty of use seemed to affect sickness; even unlimited training time before the test did not make the use as easy as the familiar joystick. Thus, making the board easier to use is a key to enable its potential; we present a few possibilities towards this goal.
HI-DWA: Human-Influenced Dynamic Window Approach for Shared Control of a Telepresence Robot
Mar 05, 2022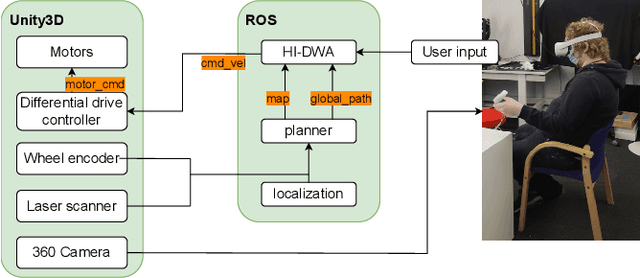
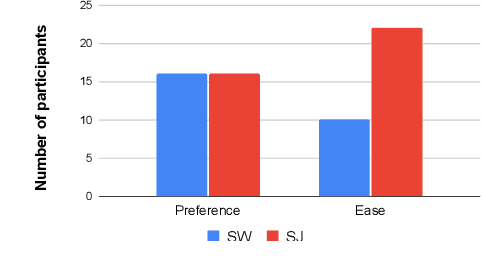
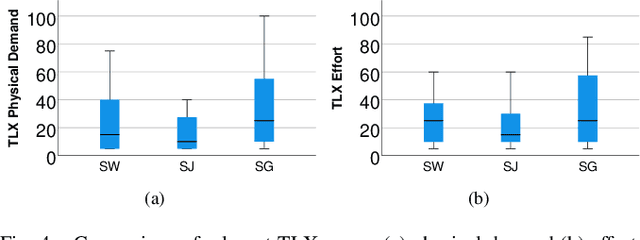
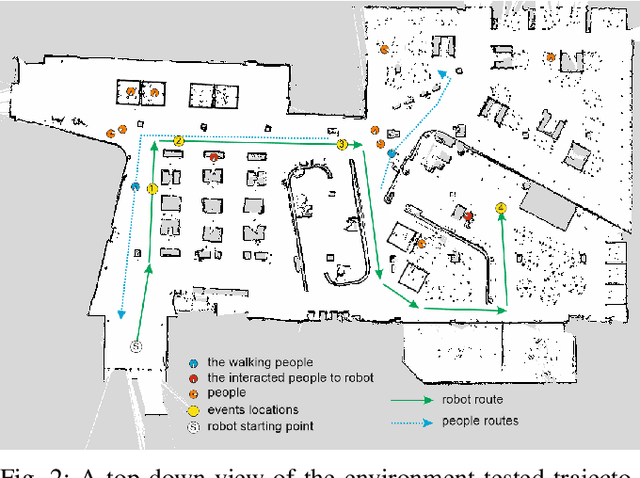
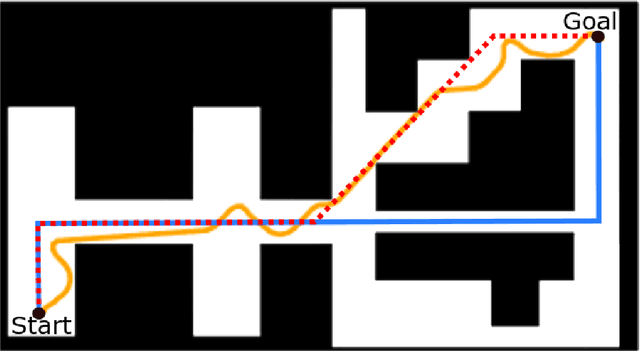
This paper considers the problem of enabling the user to modify the path of a telepresence robot. The robot is capable of autonomously navigating to the goal indicated by the user, but the user might still want to modify the path without changing the goal, for example, to go further away from other people, or to go closer to landmarks she wants to see on the way. We propose Human-Influenced Dynamic Window Approach (HI-DWA), a shared control method aimed for telepresence robots based on Dynamic Window Approach (DWA) that allows the user to influence the control input given to the robot. To verify the proposed method, we performed a user study (N=32) in Virtual Reality (VR) to compare HI-DWA with switching between autonomous navigation and manual control for controlling a simulated telepresence robot moving in a virtual environment. Results showed that users reached their goal faster using HI-DWA controller and found it easier to use. Preference between the two methods was split equally. Qualitative analysis revealed that a major reason for the participants that preferred switching between two modes was the feeling of control. We also analyzed the affect of different input methods, joystick and gesture, on the preference and perceived workload.
A Study of Preference and Comfort for Users Immersed in a Telepresence Robot
Mar 05, 2022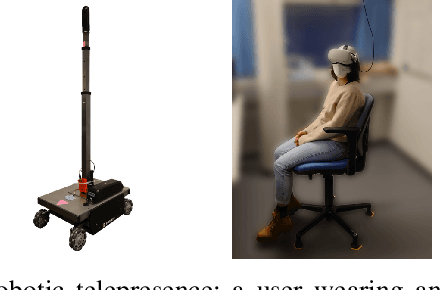
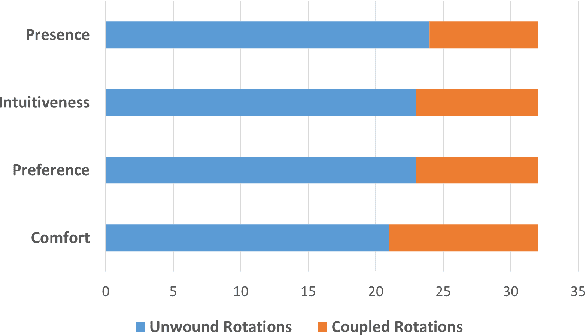
In this paper, we show that unwinding the rotations of a user immersed in a telepresence robot is preferred and may increase the feeling of presence or "being there". By immersive telepresence, we mean a scenario where a user wearing a head-mounted display embodies a mobile robot equipped with a 360{\deg} camera in another location, such that the user can move the robot and communicate with people around it. By unwinding the rotations, the user never perceives rotational motion through the head-mounted display while staying stationary, avoiding sensory mismatch which causes a major part of VR sickness. We performed a user study (N=32) on a Dolly mobile robot platform, mimicking an earlier similar study done in simulation. Unlike the simulated study, in this study there is no significant difference in the VR sickness suffered by the participants, or the condition they find more comfortable (unwinding or automatic rotations). However, participants still prefer the unwinding condition, and they judge it to render a stronger feeling of presence, a major piece in natural communication. We show that participants aboard a real telepresence robot perceive distances similarly suitable as in simulation, presenting further evidence on the applicability of VR as a research platform for robotics and human-robot interaction.
Augmenting Immersive Telepresence Experience with a Virtual Body
Feb 02, 2022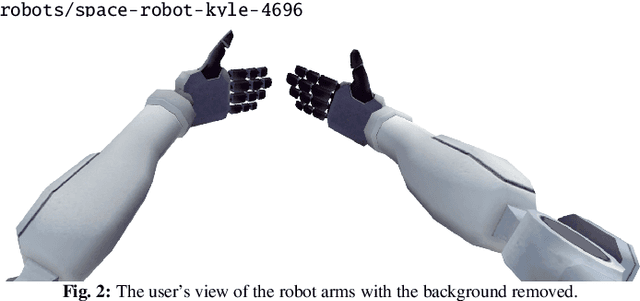
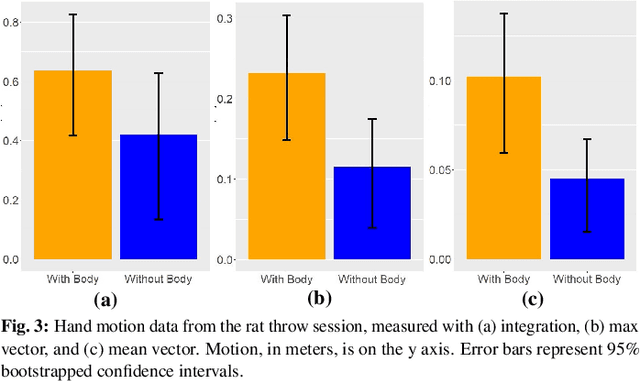
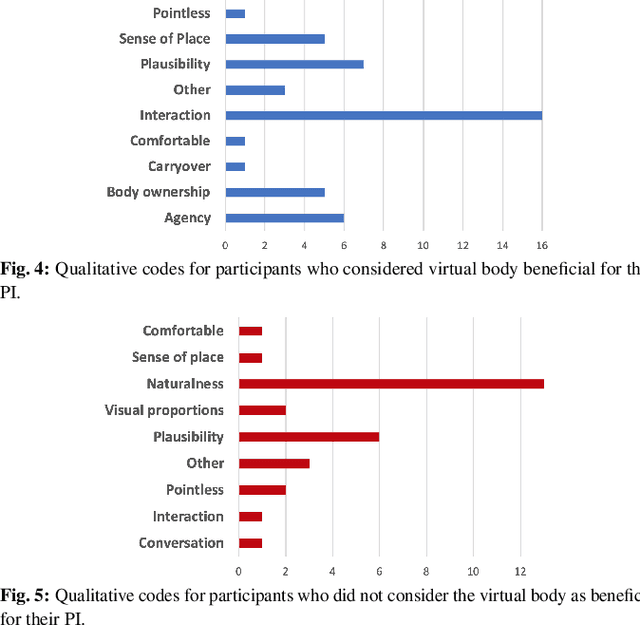
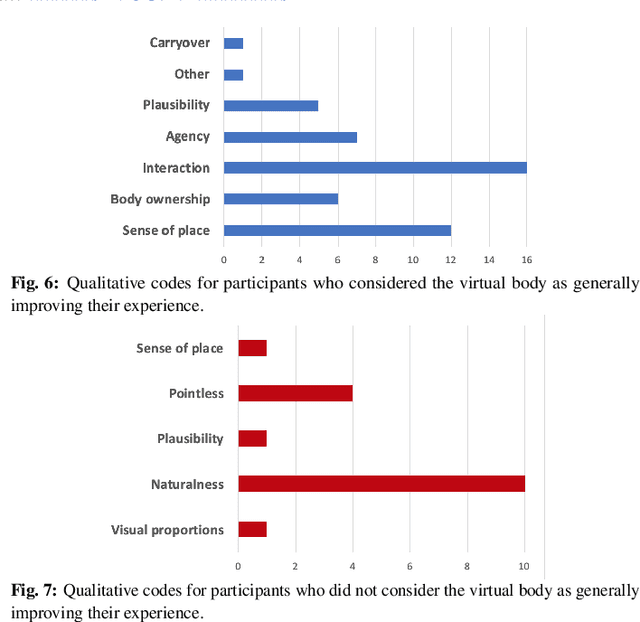
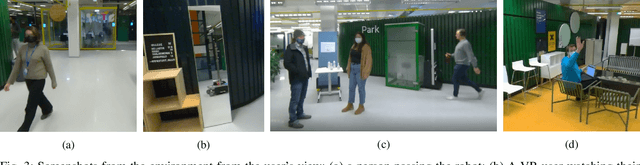
We propose augmenting immersive telepresence by adding a virtual body, representing the user's own arm motions, as realized through a head-mounted display and a 360-degree camera. Previous research has shown the effectiveness of having a virtual body in simulated environments; however, research on whether seeing one's own virtual arms increases presence or preference for the user in an immersive telepresence setup is limited. We conducted a study where a host introduced a research lab while participants wore a head-mounted display which allowed them to be telepresent at the host's physical location via a 360-degree camera, either with or without a virtual body. We first conducted a pilot study of 20 participants, followed by a pre-registered 62 participant confirmatory study. Whereas the pilot study showed greater presence and preference when the virtual body was present, the confirmatory study failed to replicate these results, with only behavioral measures suggesting an increase in presence. After analyzing the qualitative data and modeling interactions, we suspect that the quality and style of the virtual arms, and the contrast between animation and video, led to individual differences in reactions to the virtual body which subsequently moderated feelings of presence.
Unwinding Rotations Improves User Comfort with Immersive Telepresence Robots
Jan 07, 2022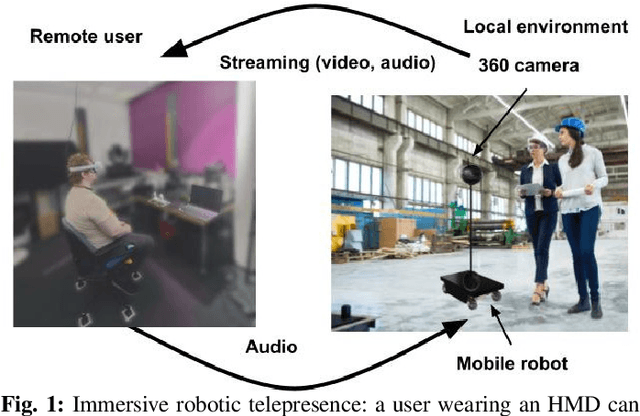
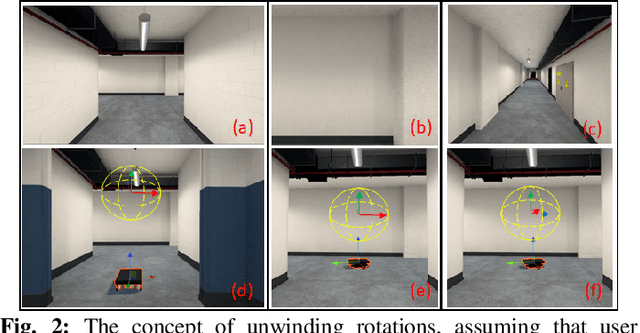

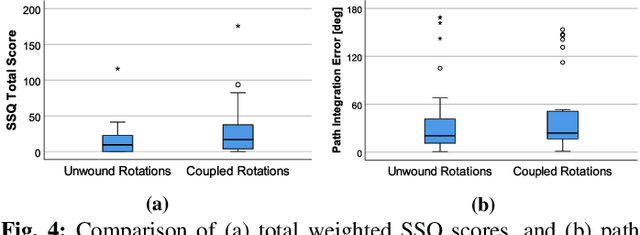
We propose unwinding the rotations experienced by the user of an immersive telepresence robot to improve comfort and reduce VR sickness of the user. By immersive telepresence we refer to a situation where a 360\textdegree~camera on top of a mobile robot is streaming video and audio into a head-mounted display worn by a remote user possibly far away. Thus, it enables the user to be present at the robot's location, look around by turning the head and communicate with people near the robot. By unwinding the rotations of the camera frame, the user's viewpoint is not changed when the robot rotates. The user can change her viewpoint only by physically rotating in her local setting; as visual rotation without the corresponding vestibular stimulation is a major source of VR sickness, physical rotation by the user is expected to reduce VR sickness. We implemented unwinding the rotations for a simulated robot traversing a virtual environment and ran a user study (N=34) comparing unwinding rotations to user's viewpoint turning when the robot turns. Our results show that the users found unwound rotations more preferable and comfortable and that it reduced their level of VR sickness. We also present further results about the users' path integration capabilities, viewing directions, and subjective observations of the robot's speed and distances to simulated people and objects.
A Survey of Robot Manipulation in Contact
Dec 03, 2021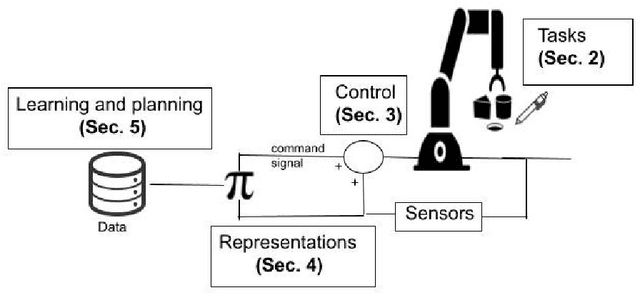
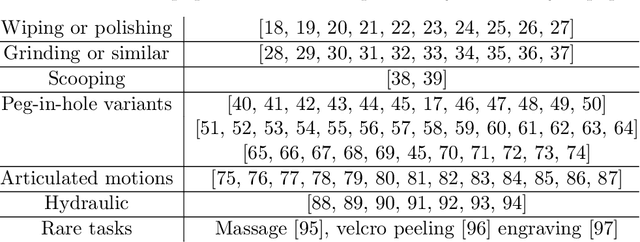
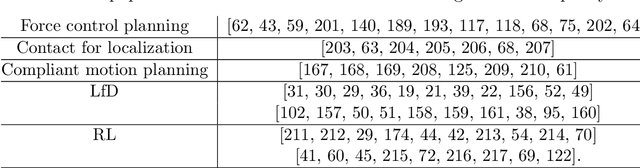
In this survey we present the current status on robots performing manipulation tasks that require varying contact with the environment, such that the robot must either implicitly or explicitly control the contact force with the environment to complete the task. Robots can perform more and more manipulation tasks that are still done by humans, and there is a growing number of publications on the topics of 1) performing tasks that always require contact and 2) mitigating uncertainty by leveraging the environment in tasks that, under perfect information, could be performed without contact. The recent trends have seen robots perform tasks earlier left for humans, such as massage, and in the classical tasks, such as peg-in-hole, there is more efficient generalization to other similar tasks, better error tolerance, and faster planning or learning of the tasks. Thus, in this survey we cover the current stage of robots performing such tasks, starting from surveying all the different in-contact tasks robots can perform, observing how these tasks are controlled and represented, and finally presenting the learning and planning of the skills required to complete these tasks.
Comfort and Sickness while Virtually Aboard an Autonomous Telepresence Robot
Sep 09, 2021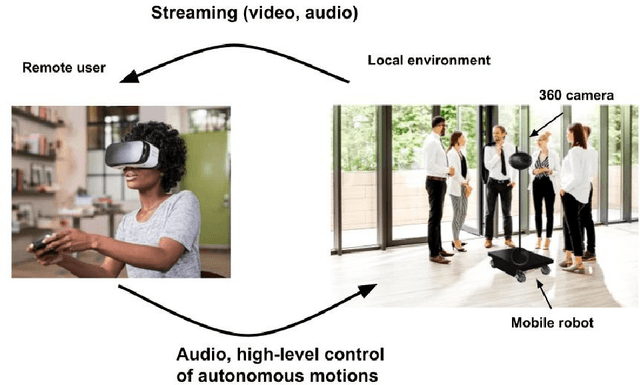

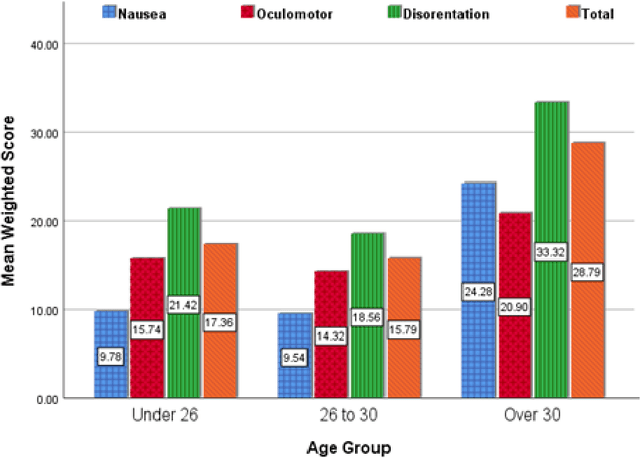
In this paper, we analyze how different path aspects affect a user's experience, mainly VR sickness and overall comfort, while immersed in an autonomously moving telepresence robot through a virtual reality headset. In particular, we focus on how the robot turns and the distance it keeps from objects, with the goal of planning suitable trajectories for an autonomously moving immersive telepresence robot in mind; rotational acceleration is known for causing the majority of VR sickness, and distance to objects modulates the optical flow. We ran a within-subjects user study (n = 36, women = 18) in which the participants watched three panoramic videos recorded in a virtual museum while aboard an autonomously moving telepresence robot taking three different paths varying in aspects such as turns, speeds, or distances to walls and objects. We found a moderate correlation between the users' sickness as measured by the SSQ and comfort on a 6-point Likert scale across all paths. However, we detected no association between sickness and the choice of the most comfortable path, showing that sickness is not the only factor affecting the comfort of the user. The subjective experience of turn speed did not correlate with either the SSQ scores or comfort, even though people often mentioned turning speed as a source of discomfort in the open-ended questions. Through exploring the open-ended answers more carefully, a possible reason is that the length and lack of predictability also play a large role in making people observe turns as uncomfortable. A larger subjective distance from walls and objects increased comfort and decreased sickness both in quantitative and qualitative data. Finally, the SSQ subscales and total weighted scores showed differences by age group and by gender.