 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeaning-Based Control of an Immersive-Telepresence Robot
Aug 22, 2022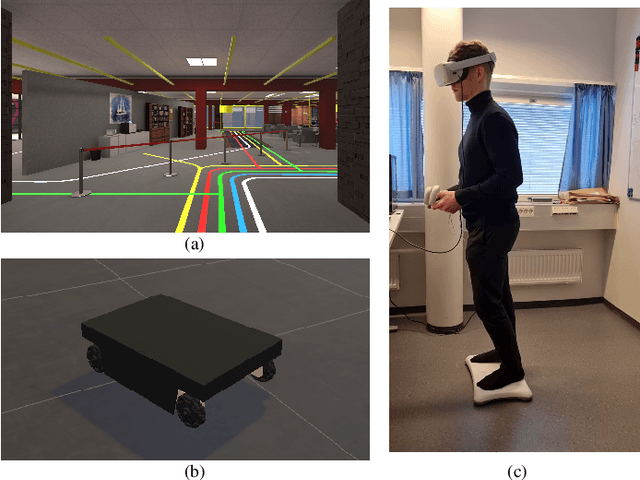

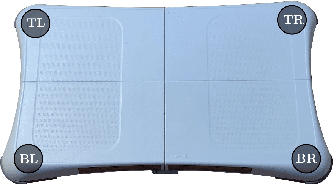
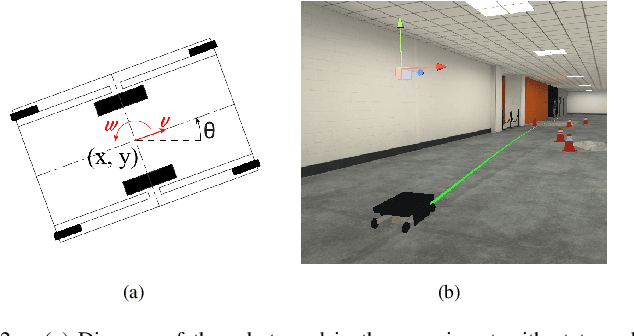
In this paper, we present an implementation of a leaning-based control of a differential drive telepresence robot and a user study in simulation, with the goal of bringing the same functionality to a real telepresence robot. The participants used a balance board to control the robot and viewed the virtual environment through a head-mounted display. The main motivation for using a balance board as the control device stems from Virtual Reality (VR) sickness; even small movements of your own body matching the motions seen on the screen decrease the sensory conflict between vision and vestibular organs, which lies at the heart of most theories regarding the onset of VR sickness. To test the hypothesis that the balance board as a control method would be less sickening than using joysticks, we designed a user study (N=32, 15 women) in which the participants drove a simulated differential drive robot in a virtual environment with either a Nintendo Wii Balance Board or joysticks. However, our pre-registered main hypotheses were not supported; the joystick did not cause any more VR sickness on the participants than the balance board, and the board proved to be statistically significantly more difficult to use, both subjectively and objectively. Analyzing the open-ended questions revealed these results to be likely connected, meaning that the difficulty of use seemed to affect sickness; even unlimited training time before the test did not make the use as easy as the familiar joystick. Thus, making the board easier to use is a key to enable its potential; we present a few possibilities towards this goal.
HI-DWA: Human-Influenced Dynamic Window Approach for Shared Control of a Telepresence Robot
Mar 05, 2022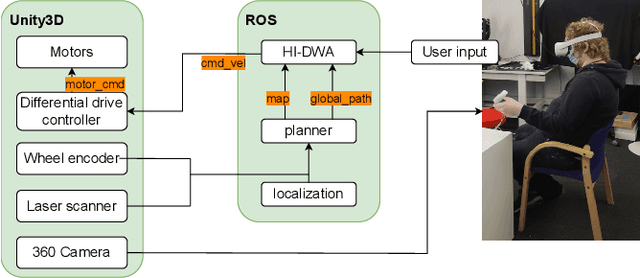
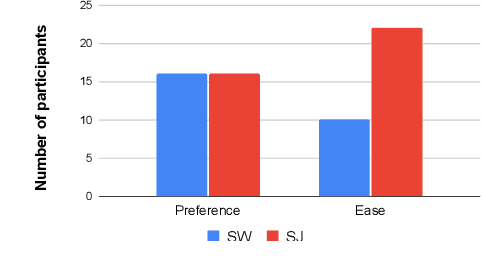
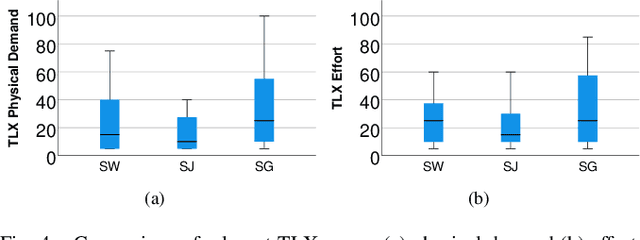
This paper considers the problem of enabling the user to modify the path of a telepresence robot. The robot is capable of autonomously navigating to the goal indicated by the user, but the user might still want to modify the path without changing the goal, for example, to go further away from other people, or to go closer to landmarks she wants to see on the way. We propose Human-Influenced Dynamic Window Approach (HI-DWA), a shared control method aimed for telepresence robots based on Dynamic Window Approach (DWA) that allows the user to influence the control input given to the robot. To verify the proposed method, we performed a user study (N=32) in Virtual Reality (VR) to compare HI-DWA with switching between autonomous navigation and manual control for controlling a simulated telepresence robot moving in a virtual environment. Results showed that users reached their goal faster using HI-DWA controller and found it easier to use. Preference between the two methods was split equally. Qualitative analysis revealed that a major reason for the participants that preferred switching between two modes was the feeling of control. We also analyzed the affect of different input methods, joystick and gesture, on the preference and perceived workload.
A Study of Preference and Comfort for Users Immersed in a Telepresence Robot
Mar 05, 2022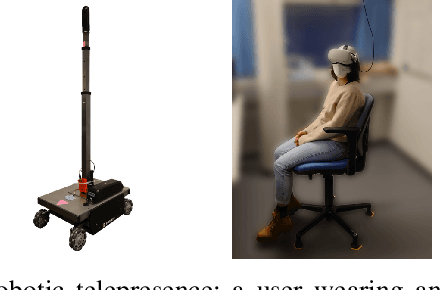
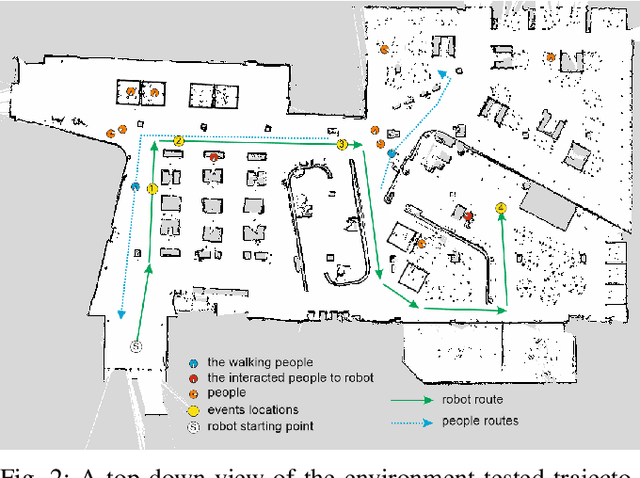
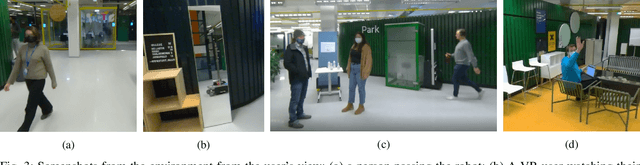
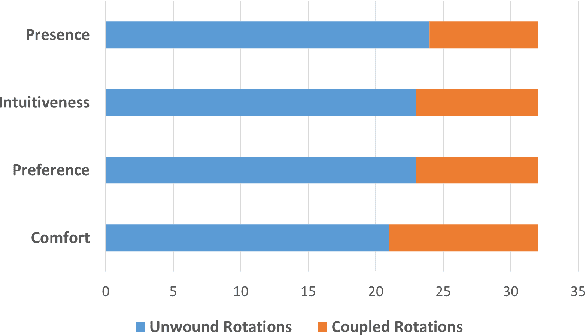
In this paper, we show that unwinding the rotations of a user immersed in a telepresence robot is preferred and may increase the feeling of presence or "being there". By immersive telepresence, we mean a scenario where a user wearing a head-mounted display embodies a mobile robot equipped with a 360{\deg} camera in another location, such that the user can move the robot and communicate with people around it. By unwinding the rotations, the user never perceives rotational motion through the head-mounted display while staying stationary, avoiding sensory mismatch which causes a major part of VR sickness. We performed a user study (N=32) on a Dolly mobile robot platform, mimicking an earlier similar study done in simulation. Unlike the simulated study, in this study there is no significant difference in the VR sickness suffered by the participants, or the condition they find more comfortable (unwinding or automatic rotations). However, participants still prefer the unwinding condition, and they judge it to render a stronger feeling of presence, a major piece in natural communication. We show that participants aboard a real telepresence robot perceive distances similarly suitable as in simulation, presenting further evidence on the applicability of VR as a research platform for robotics and human-robot interaction.
Unwinding Rotations Improves User Comfort with Immersive Telepresence Robots
Jan 07, 2022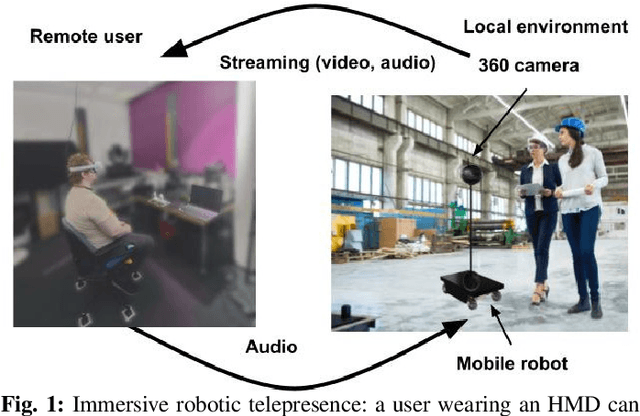
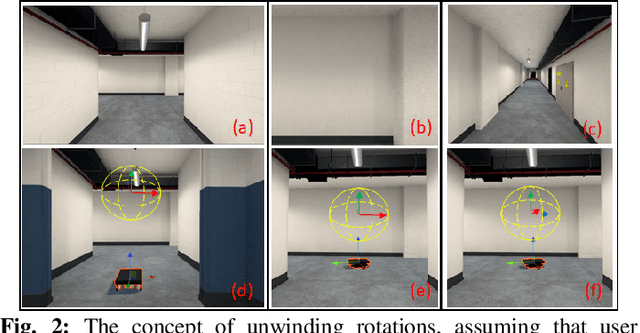

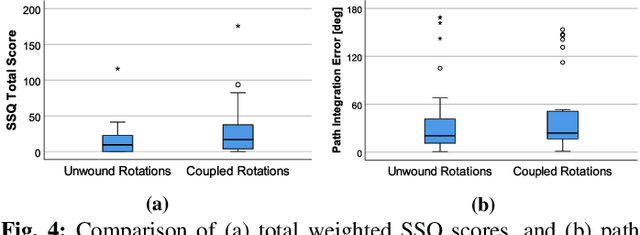
We propose unwinding the rotations experienced by the user of an immersive telepresence robot to improve comfort and reduce VR sickness of the user. By immersive telepresence we refer to a situation where a 360\textdegree~camera on top of a mobile robot is streaming video and audio into a head-mounted display worn by a remote user possibly far away. Thus, it enables the user to be present at the robot's location, look around by turning the head and communicate with people near the robot. By unwinding the rotations of the camera frame, the user's viewpoint is not changed when the robot rotates. The user can change her viewpoint only by physically rotating in her local setting; as visual rotation without the corresponding vestibular stimulation is a major source of VR sickness, physical rotation by the user is expected to reduce VR sickness. We implemented unwinding the rotations for a simulated robot traversing a virtual environment and ran a user study (N=34) comparing unwinding rotations to user's viewpoint turning when the robot turns. Our results show that the users found unwound rotations more preferable and comfortable and that it reduced their level of VR sickness. We also present further results about the users' path integration capabilities, viewing directions, and subjective observations of the robot's speed and distances to simulated people and objects.