 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobile Robot Localization Using a Novel Whisker-Like Sensor
Jan 09, 2026Whisker-like touch sensors offer unique advantages for short-range perception in environments where visual and long-range sensing are unreliable, such as confined, cluttered, or low-visibility settings. This paper presents a framework for estimating contact points and robot localization in a known planar environment using a single whisker sensor. We develop a family of virtual sensor models. Each model maps robot configurations to sensor observations and enables structured reasoning through the concept of preimages - the set of robot states consistent with a given observation. The notion of virtual sensor models serves as an abstraction to reason about state uncertainty without dependence on physical implementation. By combining sensor observations with a motion model, we estimate the contact point. Iterative estimation then enables reconstruction of obstacle boundaries. Furthermore, intersecting states inferred from current observations with forward-projected states from previous steps allow accurate robot localization without relying on vision or external systems. The framework supports both deterministic and possibilistic formulations and is validated through simulation and physical experiments using a low-cost, 3D printed, Hall-effect-based whisker sensor. Results demonstrate accurate contact estimation and localization with errors under 7 mm, demonstrating the potential of whisker-based sensing as a lightweight, adaptable complement to vision-based navigation.
Optimal Control of Sensor-Induced Illusions on Robotic Agents
Apr 25, 2025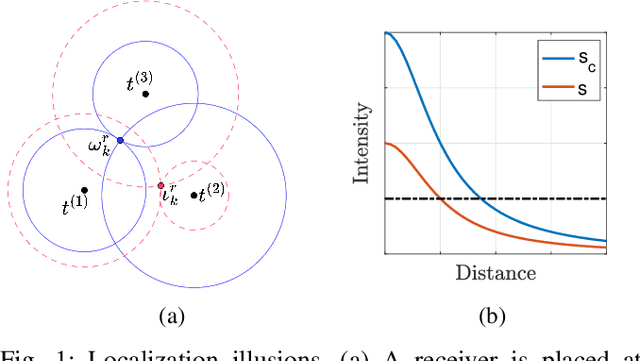
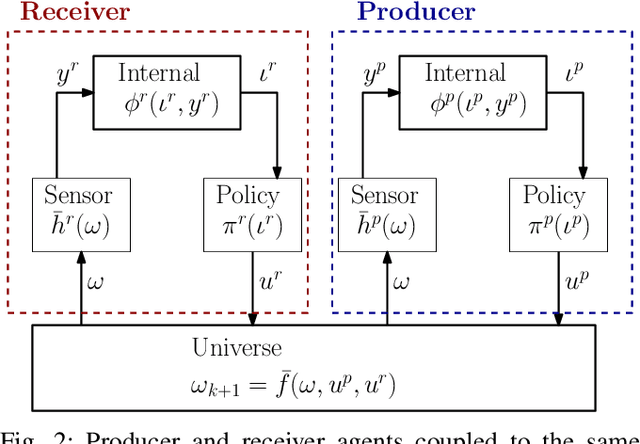
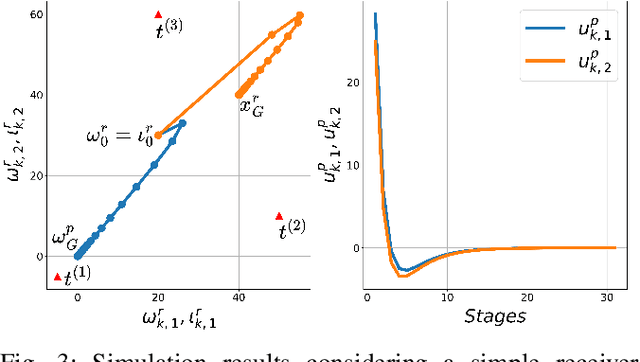
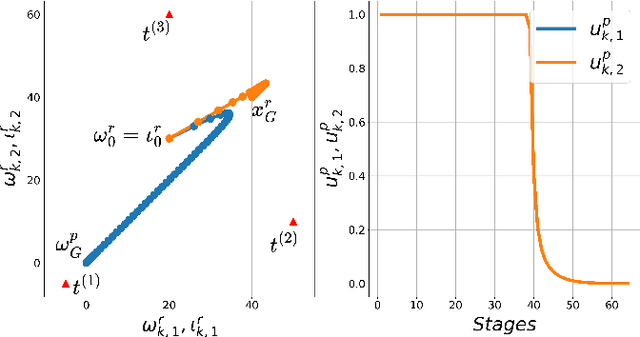
This paper presents a novel problem of creating and regulating localization and navigation illusions considering two agents: a receiver and a producer. A receiver is moving on a plane localizing itself using the intensity of signals from three known towers observed at its position. Based on this position estimate, it follows a simple policy to reach its goal. The key idea is that a producer alters the signal intensities to alter the position estimate of the receiver while ensuring it reaches a different destination with the belief that it reached its goal. We provide a precise mathematical formulation of this problem and show that it allows standard techniques from control theory to be applied to generate localization and navigation illusions that result in a desired receiver behavior.
Limits of specifiability for sensor-based robotic planning tasks
Mar 07, 2025There is now a large body of techniques, many based on formal methods, for describing and realizing complex robotics tasks, including those involving a variety of rich goals and time-extended behavior. This paper explores the limits of what sorts of tasks are specifiable, examining how the precise grounding of specifications, that is, whether the specification is given in terms of the robot's states, its actions and observations, its knowledge, or some other information,is crucial to whether a given task can be specified. While prior work included some description of particular choices for this grounding, our contribution treats this aspect as a first-class citizen: we introduce notation to deal with a large class of problems, and examine how the grounding affects what tasks can be posed. The results demonstrate that certain classes of tasks are specifiable under different combinations of groundings.
Minimally sufficient structures for information-feedback policies
Feb 19, 2025In this paper, we consider robotic tasks which require a desirable outcome to be achieved in the physical world that the robot is embedded in and interacting with. Accomplishing this objective requires designing a filter that maintains a useful representation of the physical world and a policy over the filter states. A filter is seen as the robot's perspective of the physical world based on limited sensing, memory, and computation and it is represented as a transition system over a space of information states. To this end, the interactions result from the coupling of an internal and an external system, a filter, and the physical world, respectively, through a sensor mapping and an information-feedback policy. Within this setup, we look for sufficient structures, that is, sufficient internal systems and sensors, for accomplishing a given task. We establish necessary and sufficient conditions for these structures to satisfy for information-feedback policies that can be defined over the states of an internal system to exist. We also show that under mild assumptions, minimal internal systems that can represent a particular plan/policy described over the action-observation histories exist and are unique. Finally, the results are applied to determine sufficient structures for distance-optimal navigation in a polygonal environment.
A Mathematical Characterization of Minimally Sufficient Robot Brains
Aug 17, 2023This paper addresses the lower limits of encoding and processing the information acquired through interactions between an internal system (robot algorithms or software) and an external system (robot body and its environment) in terms of action and observation histories. Both are modeled as transition systems. We want to know the weakest internal system that is sufficient for achieving passive (filtering) and active (planning) tasks. We introduce the notion of an information transition system for the internal system which is a transition system over a space of information states that reflect a robot's or other observer's perspective based on limited sensing, memory, computation, and actuation. An information transition system is viewed as a filter and a policy or plan is viewed as a function that labels the states of this information transition system. Regardless of whether internal systems are obtained by learning algorithms, planning algorithms, or human insight, we want to know the limits of feasibility for given robot hardware and tasks. We establish, in a general setting, that minimal information transition systems exist up to reasonable equivalence assumptions, and are unique under some general conditions. We then apply the theory to generate new insights into several problems, including optimal sensor fusion/filtering, solving basic planning tasks, and finding minimal representations for modeling a system given input-output relations.
The Limits of Learning and Planning: Minimal Sufficient Information Transition Systems
Dec 01, 2022In this paper, we view a policy or plan as a transition system over a space of information states that reflect a robot's or other observer's perspective based on limited sensing, memory, computation, and actuation. Regardless of whether policies are obtained by learning algorithms, planning algorithms, or human insight, we want to know the limits of feasibility for given robot hardware and tasks. Toward the quest to find the best policies, we establish in a general setting that minimal information transition systems (ITSs) exist up to reasonable equivalence assumptions, and are unique under some general conditions. We then apply the theory to generate new insights into several problems, including optimal sensor fusion/filtering, solving basic planning tasks, and finding minimal representations for feasible policies.
Bang-Bang Boosting of RRTs
Oct 04, 2022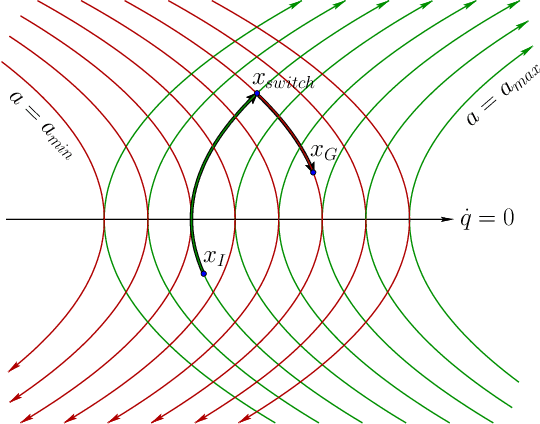


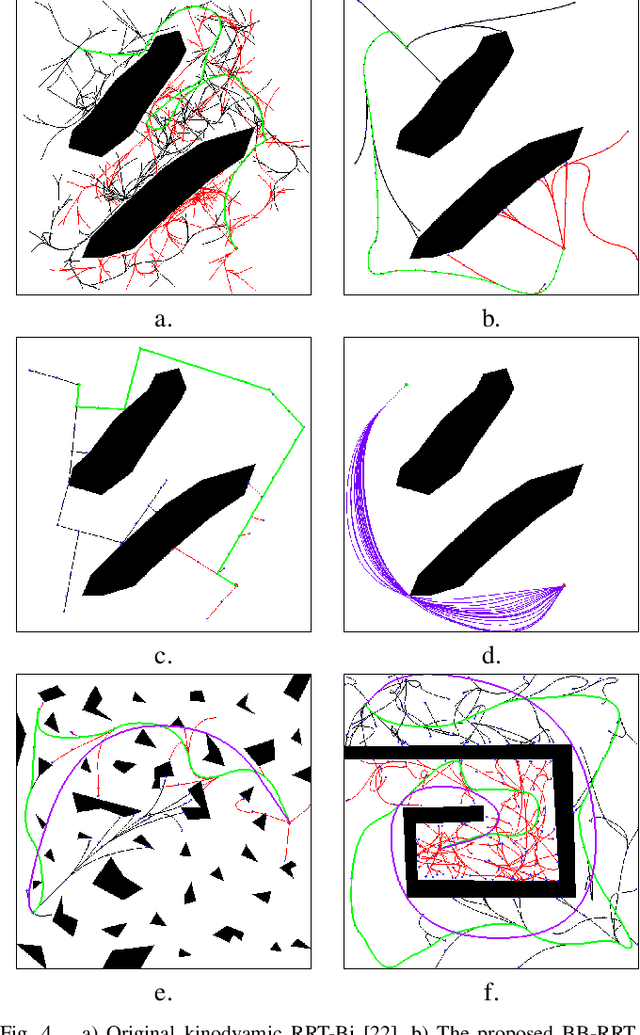
This paper explores the use of time-optimal controls to improve the performance of sampling-based kinodynamic planners. A computationally efficient steering method is introduced that produces time-optimal trajectories between any states for a vector of double integrators. This method is applied in three ways: 1) to generate RRT edges that quickly solve the two-point boundary-value problems, 2) to produce an RRT (quasi)metric for more accurate Voronoi bias, and 3) to time-optimize a given collision-free trajectory. Experiments are performed for state spaces with up to 2000 dimensions, resulting in improved computed trajectories and orders of magnitude computation time improvements over using ordinary metrics and constant controls.
Leaning-Based Control of an Immersive-Telepresence Robot
Aug 22, 2022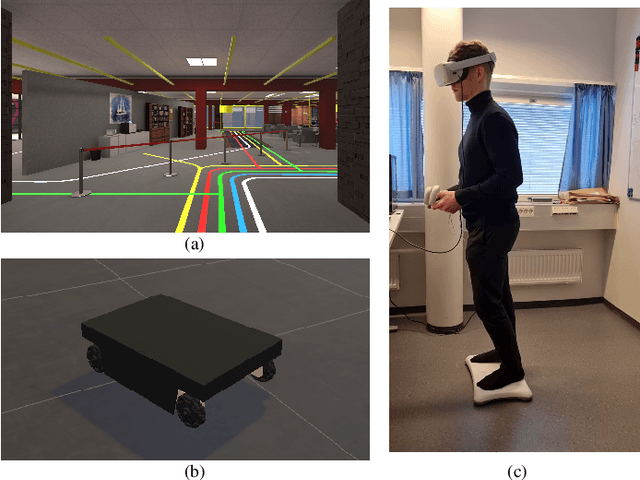

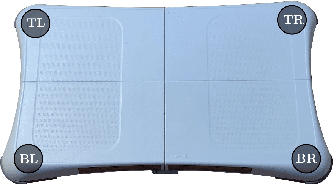
In this paper, we present an implementation of a leaning-based control of a differential drive telepresence robot and a user study in simulation, with the goal of bringing the same functionality to a real telepresence robot. The participants used a balance board to control the robot and viewed the virtual environment through a head-mounted display. The main motivation for using a balance board as the control device stems from Virtual Reality (VR) sickness; even small movements of your own body matching the motions seen on the screen decrease the sensory conflict between vision and vestibular organs, which lies at the heart of most theories regarding the onset of VR sickness. To test the hypothesis that the balance board as a control method would be less sickening than using joysticks, we designed a user study (N=32, 15 women) in which the participants drove a simulated differential drive robot in a virtual environment with either a Nintendo Wii Balance Board or joysticks. However, our pre-registered main hypotheses were not supported; the joystick did not cause any more VR sickness on the participants than the balance board, and the board proved to be statistically significantly more difficult to use, both subjectively and objectively. Analyzing the open-ended questions revealed these results to be likely connected, meaning that the difficulty of use seemed to affect sickness; even unlimited training time before the test did not make the use as easy as the familiar joystick. Thus, making the board easier to use is a key to enable its potential; we present a few possibilities towards this goal.
Safe Motion Planning for a Mobile Robot Navigating in Environments Shared with Humans
Jun 15, 2022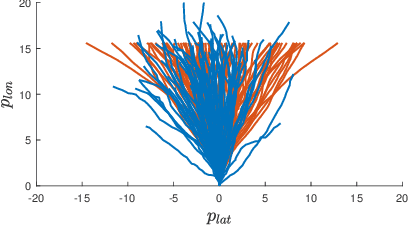
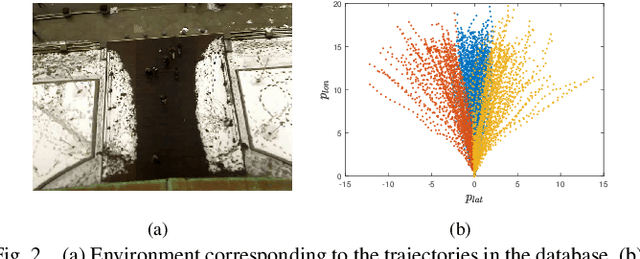
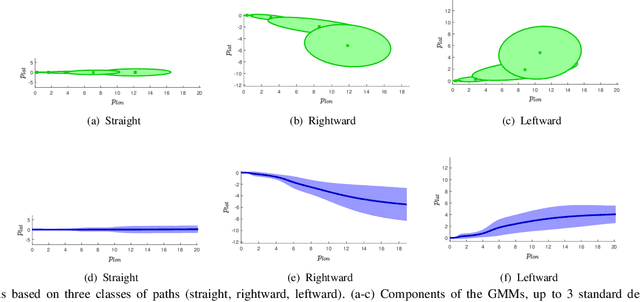

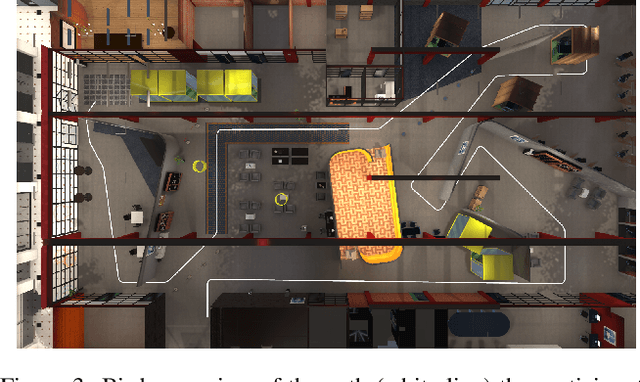
In this paper, a robot navigating an environment shared with humans is considered, and a cost function that can be exploited in $\text{RRT}^\text{X}$, a randomized sampling-based replanning algorithm that guarantees asymptotic optimality, to allow for a safe motion is proposed. The cost function is a path length weighted by a danger index based on a prediction of human motion performed using either a linear stochastic model, assuming constant longitudinal velocity and varying lateral velocity, and a GMM/GMR-based model, computed on an experimental dataset of human trajectories. The proposed approach is validated using a dataset of human trajectories collected in a real world setting.
An Enactivist-Inspired Mathematical Model of Cognition
Jun 10, 2022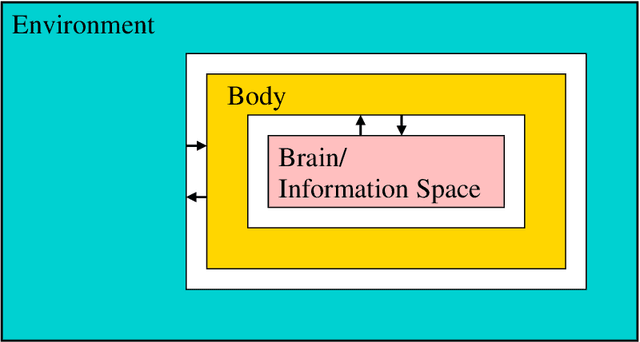

We formulate five basic tenets of enactivist cognitive science that we have carefully identified in the relevant literature as the main underlying principles of that philosophy. We then develop a mathematical framework to talk about cognitive systems (both artificial and natural) which complies with these enactivist tenets. In particular we pay attention that our mathematical modeling does not attribute contentful symbolic representations to the agents, and that the agent's brain, body and environment are modeled in a way that makes them an inseparable part of a greater totality. The purpose is to create a mathematical foundation for cognition which is in line with enactivism. We see two main benefits of doing so: (1) It enables enactivist ideas to be more accessible for computer scientists, AI researchers, roboticists, cognitive scientists, and psychologists, and (2) it gives the philosophers a mathematical tool which can be used to clarify their notions and help with their debates. Our main notion is that of a sensorimotor system which is a special case of a well studied notion of a transition system. We also consider related notions such as labeled transition systems and deterministic automata. We analyze a notion called sufficiency and show that it is a very good candidate for a foundational notion in the "mathematics of cognition from an enactivist perspective". We demonstrate its importance by proving a uniqueness theorem about the minimal sufficient refinements (which correspond in some sense to an optimal attunement of an organism to its environment) and by showing that sufficiency corresponds to known notions such as sufficient history information spaces. We then develop other related notions such as degree of insufficiency, universal covers, hierarchies, strategic sufficiency. In the end, we tie it all back to the enactivist tenets.