 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Study of Preference and Comfort for Users Immersed in a Telepresence Robot
Mar 05, 2022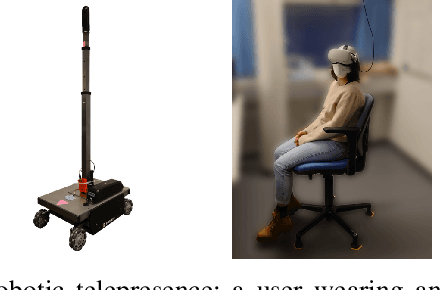
In this paper, we show that unwinding the rotations of a user immersed in a telepresence robot is preferred and may increase the feeling of presence or "being there". By immersive telepresence, we mean a scenario where a user wearing a head-mounted display embodies a mobile robot equipped with a 360{\deg} camera in another location, such that the user can move the robot and communicate with people around it. By unwinding the rotations, the user never perceives rotational motion through the head-mounted display while staying stationary, avoiding sensory mismatch which causes a major part of VR sickness. We performed a user study (N=32) on a Dolly mobile robot platform, mimicking an earlier similar study done in simulation. Unlike the simulated study, in this study there is no significant difference in the VR sickness suffered by the participants, or the condition they find more comfortable (unwinding or automatic rotations). However, participants still prefer the unwinding condition, and they judge it to render a stronger feeling of presence, a major piece in natural communication. We show that participants aboard a real telepresence robot perceive distances similarly suitable as in simulation, presenting further evidence on the applicability of VR as a research platform for robotics and human-robot interaction.
Unwinding Rotations Improves User Comfort with Immersive Telepresence Robots
Jan 07, 2022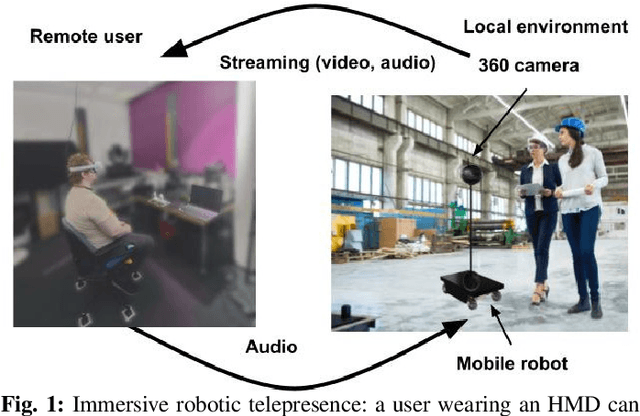
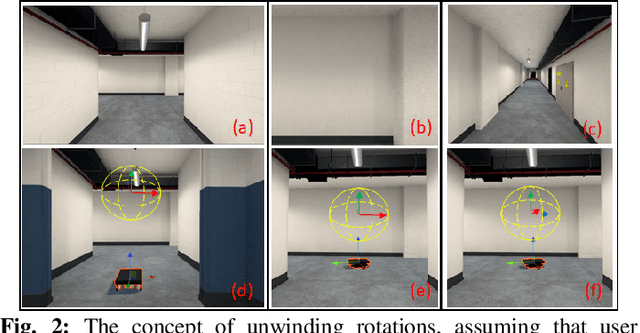

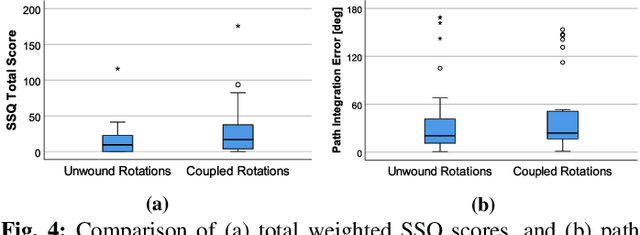
We propose unwinding the rotations experienced by the user of an immersive telepresence robot to improve comfort and reduce VR sickness of the user. By immersive telepresence we refer to a situation where a 360\textdegree~camera on top of a mobile robot is streaming video and audio into a head-mounted display worn by a remote user possibly far away. Thus, it enables the user to be present at the robot's location, look around by turning the head and communicate with people near the robot. By unwinding the rotations of the camera frame, the user's viewpoint is not changed when the robot rotates. The user can change her viewpoint only by physically rotating in her local setting; as visual rotation without the corresponding vestibular stimulation is a major source of VR sickness, physical rotation by the user is expected to reduce VR sickness. We implemented unwinding the rotations for a simulated robot traversing a virtual environment and ran a user study (N=34) comparing unwinding rotations to user's viewpoint turning when the robot turns. Our results show that the users found unwound rotations more preferable and comfortable and that it reduced their level of VR sickness. We also present further results about the users' path integration capabilities, viewing directions, and subjective observations of the robot's speed and distances to simulated people and objects.