 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComfort and Sickness while Virtually Aboard an Autonomous Telepresence Robot
Sep 09, 2021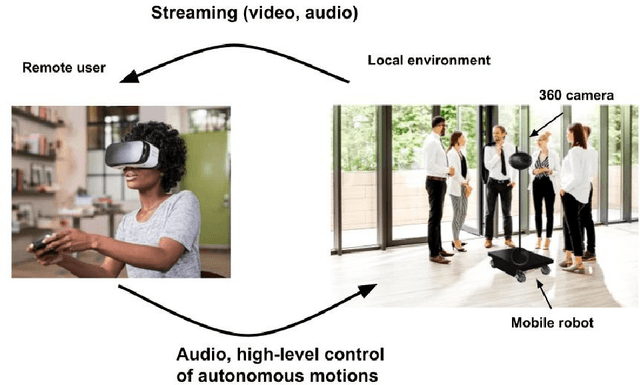

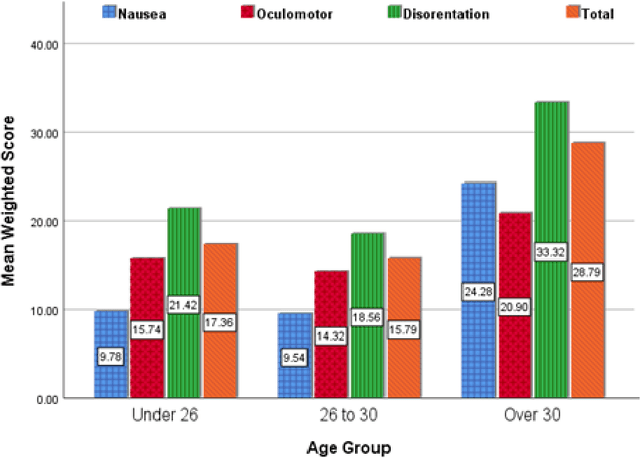
In this paper, we analyze how different path aspects affect a user's experience, mainly VR sickness and overall comfort, while immersed in an autonomously moving telepresence robot through a virtual reality headset. In particular, we focus on how the robot turns and the distance it keeps from objects, with the goal of planning suitable trajectories for an autonomously moving immersive telepresence robot in mind; rotational acceleration is known for causing the majority of VR sickness, and distance to objects modulates the optical flow. We ran a within-subjects user study (n = 36, women = 18) in which the participants watched three panoramic videos recorded in a virtual museum while aboard an autonomously moving telepresence robot taking three different paths varying in aspects such as turns, speeds, or distances to walls and objects. We found a moderate correlation between the users' sickness as measured by the SSQ and comfort on a 6-point Likert scale across all paths. However, we detected no association between sickness and the choice of the most comfortable path, showing that sickness is not the only factor affecting the comfort of the user. The subjective experience of turn speed did not correlate with either the SSQ scores or comfort, even though people often mentioned turning speed as a source of discomfort in the open-ended questions. Through exploring the open-ended answers more carefully, a possible reason is that the length and lack of predictability also play a large role in making people observe turns as uncomfortable. A larger subjective distance from walls and objects increased comfort and decreased sickness both in quantitative and qualitative data. Finally, the SSQ subscales and total weighted scores showed differences by age group and by gender.
Analysis of User Preferences for Robot Motions in Immersive Telepresence
Mar 05, 2021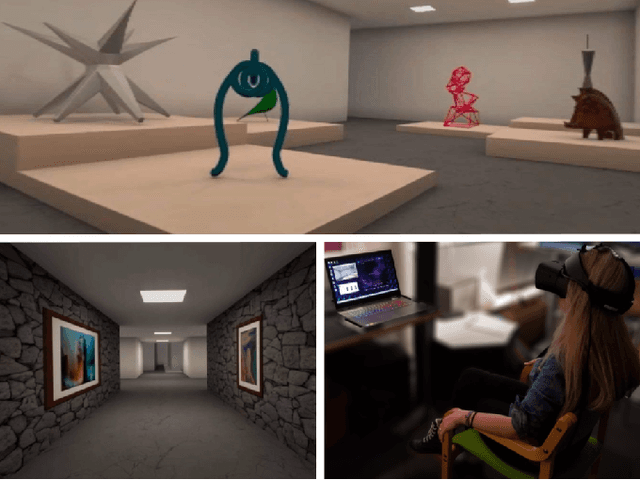
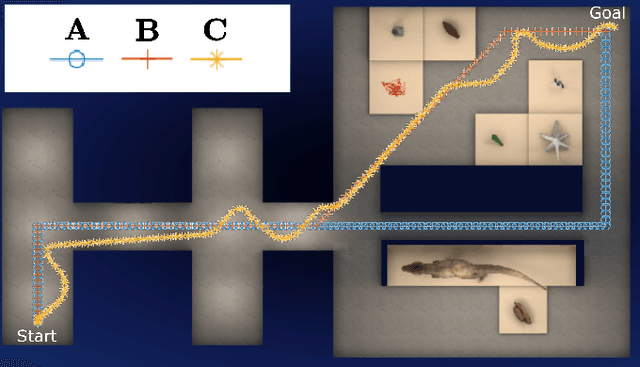
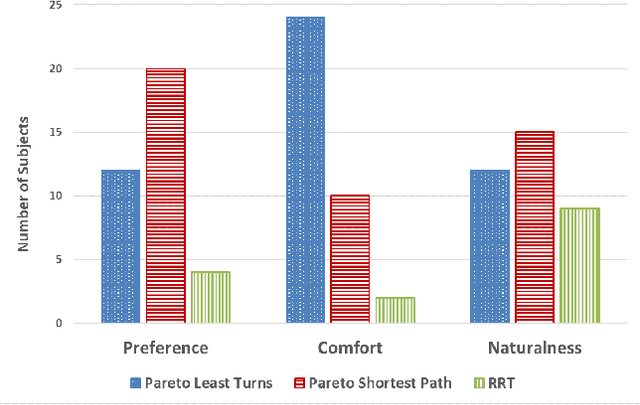
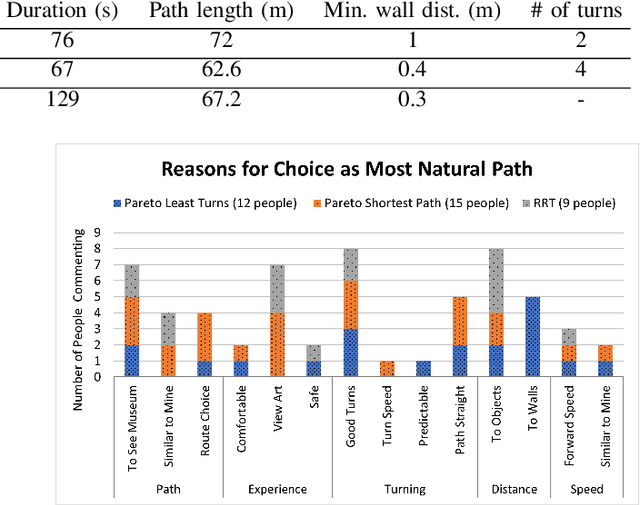
This paper considers how the motions of a telepresence robot moving autonomously affect a person immersed in the robot through a head-mounted display. In particular, we explore the preference, comfort, and naturalness of elements of piecewise linear paths compared to the same elements on a smooth path. In a user study, thirty-six subjects watched panoramic videos of three different paths through a simulated museum in virtual reality and responded to questionnaires regarding each path. Preference for a particular path was influenced the most by comfort, forward speed, and characteristics of the turns. Preference was also strongly associated with the users' perceived naturalness, which was primarily determined by the ability to see salient objects, the distance to the walls and objects, as well as the turns. Participants favored the paths that had a one meter per second forward speed and rated the path with the least amount of turns as the most comfortable.
Defining Preferred and Natural Robot Motions in Immersive Telepresence from a First-Person Perspective
Feb 25, 2021
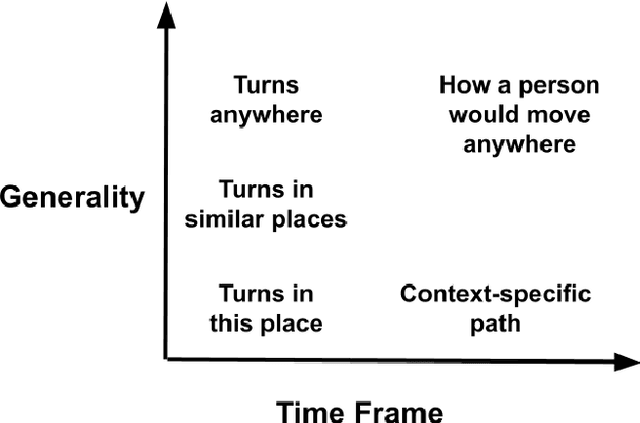
This paper presents some early work and future plans regarding how the autonomous motions of a telepresence robot affect a person embodied in the robot through a head-mounted display. We consider the preferences, comfort, and the perceived naturalness of aspects of piecewise linear paths compared to the same aspects on a smooth path. In a user study, thirty-six subjects (eighteen females) watched panoramic videos of three different paths through a simulated museum in virtual reality and responded to questionnaires regarding each path. We found that comfort had a strong effect on path preference, and that the subjective feeling of naturalness also had a strong effect on path preference, even though people consider different things as natural. We describe a categorization of the responses regarding the naturalness of the robot's motion and provide a recommendation on how this can be applied more broadly. Although immersive robotic telepresence is increasingly being used for remote education, clinical care, and to assist people with disabilities or mobility complications, the full potential of this technology is limited by issues related to user experience. Our work addresses these shortcomings and will enable the future personalization of telepresence experiences for the improvement of overall remote communication and the enhancement of the feeling of presence in a remote location.
Human Perception-Optimized Planning for Comfortable VR-Based Telepresence
Feb 25, 2020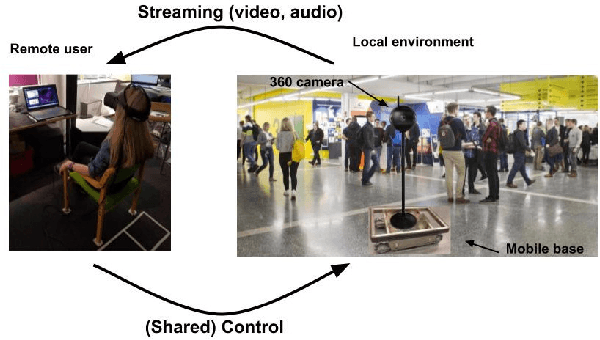
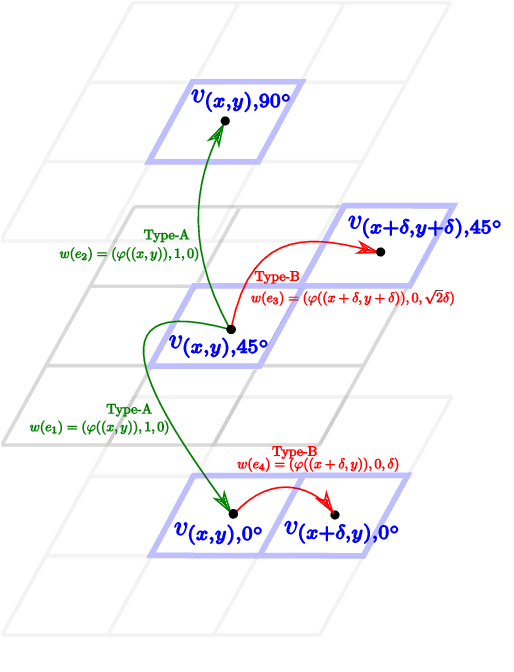
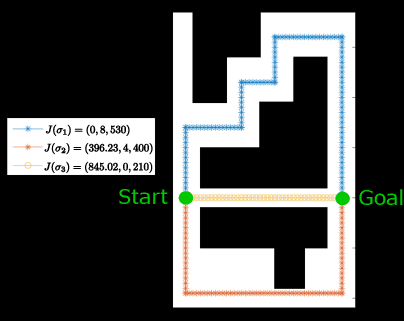
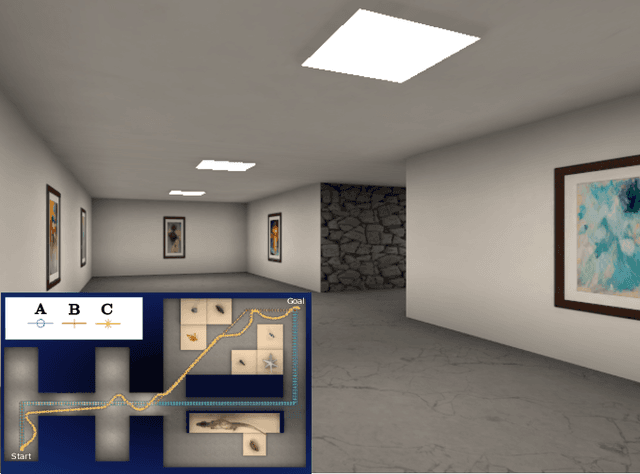
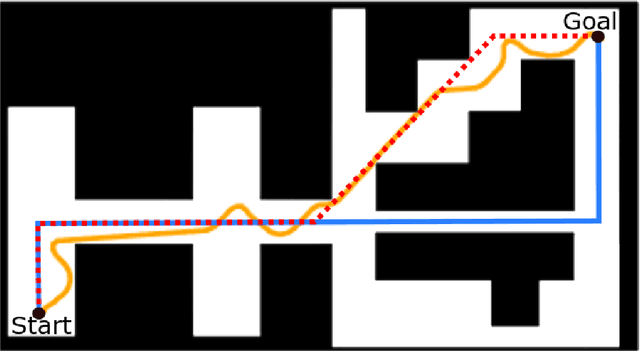
This paper introduces an emerging motion planning problem by considering a human that is immersed into the viewing perspective of a remote robot. The challenge is to make the experience both effective (such as delivering a sense of presence) and comfortable (such as avoiding adverse sickness symptoms, including nausea). We refer to this challenging new area as human perception-optimized planning and propose a general multiobjective optimization framework that can be instantiated in many envisioned scenarios. We then consider a specific VR telepresence task as a case of human perception-optimized planning, in which we simulate a robot that sends 360 video to a remote user to be viewed through a head-mounted display. In this particular task, we plan trajectories that minimize VR sickness (and thereby maximize comfort). An A* type method is used to create a Pareto-optimal collection of piecewise linear trajectories while taking into account criteria that improve comfort. We conducted a study with human subjects touring a virtual museum, in which paths computed by our algorithm are compared against a reference RRT-based trajectory. Generally, users suffered less from VR sickness and preferred the paths created by the presented algorithm.