 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot and Overhead Crane Collaboration Scheme to Enhance Payload Manipulation
Aug 11, 2025This paper presents a scheme to enhance payload manipulation using a robot collaborating with an overhead crane. In the current industrial practice, when the crane's payload has to be accurately manipulated and located in a desired position, the task becomes laborious and risky since the operators have to guide the fine motions of the payload by hand. In the proposed collaborative scheme, the crane lifts the payload while the robot's end-effector guides it toward the desired position. The only link between the robot and the crane is the interaction force produced during the guiding of the payload. Two admittance transfer functions are considered to accomplish harmless and smooth contact with the payload. The first is used in a position-based admittance control integrated with the robot. The second one adds compliance to the crane by processing the interaction force through the admittance transfer function to generate a crane's velocity command that makes the crane follow the payload. Then the robot's end-effector and the crane move collaboratively to guide the payload to the desired location. A method is presented to design the admittance controllers that accomplish a fluent robot-crane collaboration. Simulations and experiments validating the scheme potential are shown.
Programming of Skill-based Robots
Sep 25, 2024Manufacturing is facing ever changing market demands, with faster innovation cycles resulting to growing agility and flexibility requirements. Industry 4.0 has been transforming the manufacturing world towards digital automation and the importance of software has increased drastically. Easy and fast task programming and execution in robot - sensor systems become a prerequisite for agile and flexible automation and in this paper, we propose such a system. Our solution relies on a robot skill library, which provides the user with high level and parametrized operations, i.e., robot skills, for task programming and execution. Programming actions results to a control recipe in a neutral product context and is based on use of product CAD models or alternatively collaborative use of pointers and tracking sensor with real parts. Practical tests are also reported to show the feasibility of our approach.
Visual Servoing Based on 3D Features: Design and Implementation for Robotic Insertion Tasks
May 29, 2024This paper proposes a feature-based Visual Servoing (VS) method for insertion task skills. A camera mounted on the robot's end-effector provides the pose relative to a cylinder (hole), allowing a contact-free and damage-free search of the hole and avoiding uncertainties emerging when the pose is computed via robot kinematics. Two points located on the hole's principal axis and three mutually orthogonal planes defining the flange's reference frame are associated with the pose of the hole and the flange, respectively. The proposed VS drives to zero the distance between the two points and the three planes aligning the robot's flange with the hole's direction. Compared with conventional VS where the Jacobian is difficult to compute in practice, the proposed featured-based uses a Jacobian easily calculated from the measured hole pose. Furthermore, the feature-based VS design considers the robot's maximum cartesian velocity. The VS method is implemented in an industrial robot and the experimental results support its usefulness.
A Weeding Robot for Seedling Removal
May 21, 2024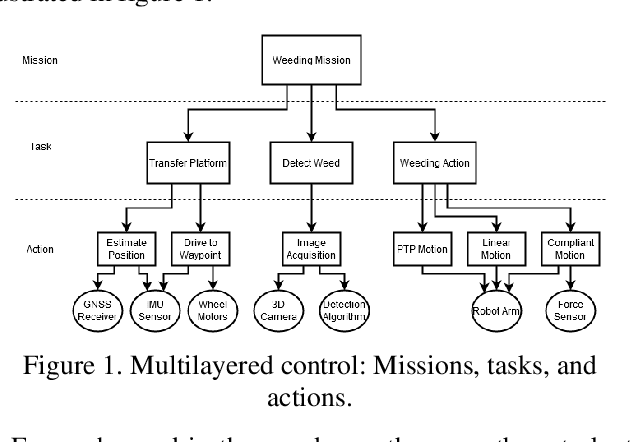
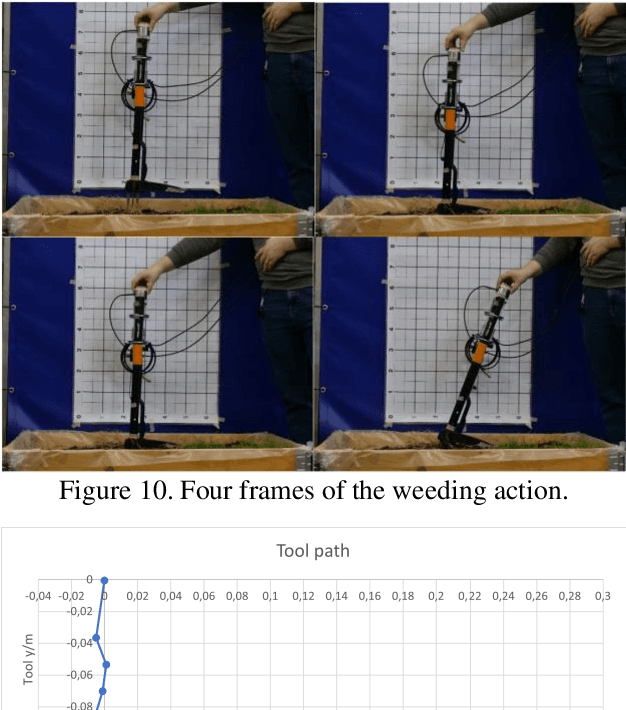
Automatic weeding technologies have attained a lot of attention lately, because of the harms and challenges weeds are causing for livestock farming, in addition to that weeds reduce yields. We are targeting automatic and mechanical Rumex weeding in open pasture fields using light weight mobile field robot technologies. We describe a mobile weeding robot with GNSS navigation, 3D computer vision for weed detection, and a robot arm with a mechanical weeding tool. Our main contribution is showing the feasibility of light weight robot, sensor, and tool technologies in mechanical removal of weed seedlings.