Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Weeding Robot for Seedling Removal
Paper and Code
May 21, 2024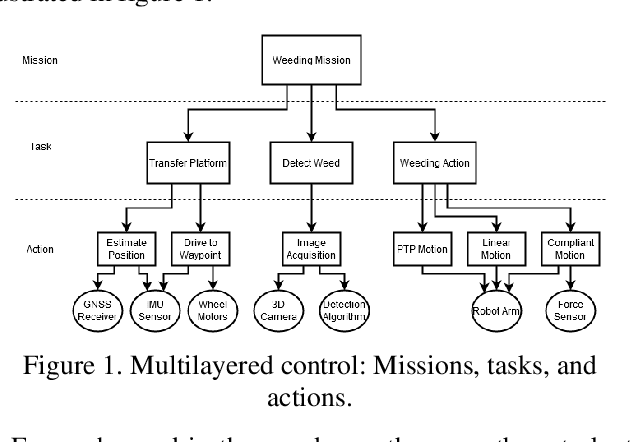
Automatic weeding technologies have attained a lot of attention lately, because of the harms and challenges weeds are causing for livestock farming, in addition to that weeds reduce yields. We are targeting automatic and mechanical Rumex weeding in open pasture fields using light weight mobile field robot technologies. We describe a mobile weeding robot with GNSS navigation, 3D computer vision for weed detection, and a robot arm with a mechanical weeding tool. Our main contribution is showing the feasibility of light weight robot, sensor, and tool technologies in mechanical removal of weed seedlings.
* 4 pages, 18 figures
View paper on