 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffline Goal-Conditioned Reinforcement Learning for Shape Control of Deformable Linear Objects
Mar 15, 2024Deformable objects present several challenges to the field of robotic manipulation. One of the tasks that best encapsulates the difficulties arising due to non-rigid behavior is shape control, which requires driving an object to a desired shape. While shape-servoing methods have been shown successful in contexts with approximately linear behavior, they can fail in tasks with more complex dynamics. We investigate an alternative approach, using offline RL to solve a planar shape control problem of a Deformable Linear Object (DLO). To evaluate the effect of material properties, two DLOs are tested namely a soft rope and an elastic cord. We frame this task as a goal-conditioned offline RL problem, and aim to learn to generalize to unseen goal shapes. Data collection and augmentation procedures are proposed to limit the amount of experimental data which needs to be collected with the real robot. We evaluate the amount of augmentation needed to achieve the best results, and test the effect of regularization through behavior cloning on the TD3+BC algorithm. Finally, we show that the proposed approach is able to outperform a shape-servoing baseline in a curvature inversion experiment.
ROBUSfT: Robust Real-Time Shape-from-Template, a C++ Library
Jan 10, 2023



Tracking the 3D shape of a deforming object using only monocular 2D vision is a challenging problem. This is because one should (i) infer the 3D shape from a 2D image, which is a severely underconstrained problem, and (ii) implement the whole solution pipeline in real-time. The pipeline typically requires feature detection and matching, mismatch filtering, 3D shape inference and feature tracking algorithms. We propose ROBUSfT, a conventional pipeline based on a template containing the object's rest shape, texturemap and deformation law. ROBUSfT is ready-to-use, wide-baseline, capable of handling large deformations, fast up to 30 fps, free of training, and robust against partial occlusions and discontinuity in video frames. It outperforms the state-of-the-art methods in challenging datasets. ROBUSfT is implemented as a publicly available C++ library and we provide a tutorial on how to use it in https://github.com/mrshetab/ROBUSfT
Lattice-based shape tracking and servoing of elastic objects
Sep 07, 2022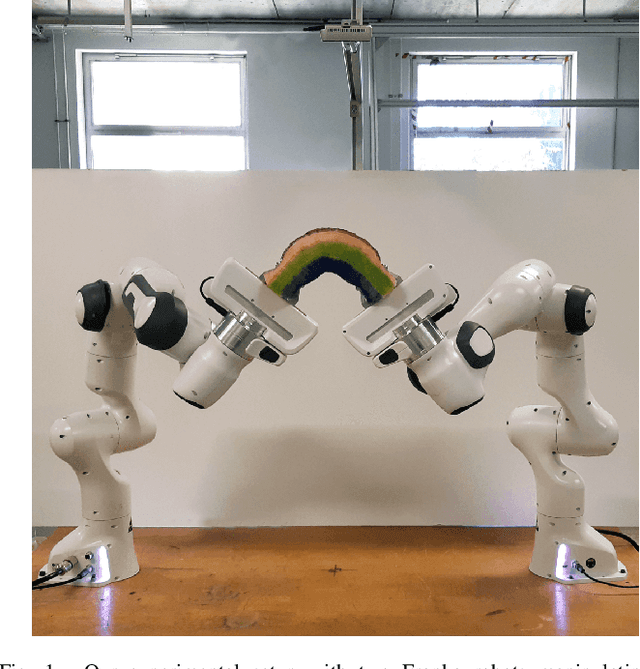
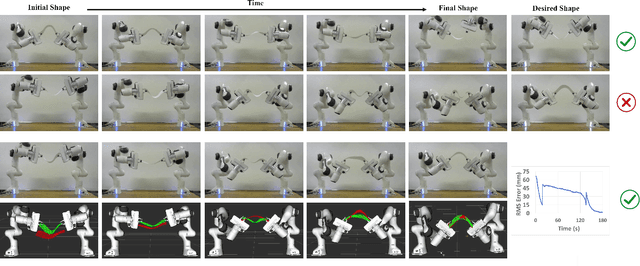
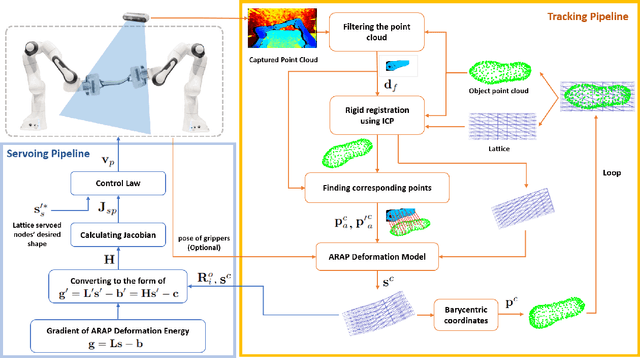

In this paper, we propose a general unified tracking-servoing approach for controlling the shape of elastic deformable objects using robotic arms. Our approach works by forming a lattice around the object, binding the object to the lattice, and tracking and servoing the lattice instead of the object. This makes our approach have full 3D control over deformable objects of any general form (linear, thin-shell, volumetric). Furthermore, it decouples the runtime complexity of the approach from the objects' geometric complexity. Our approach is based on the As-Rigid-As-Possible (ARAP) deformation model. It requires no mechanical parameter of the object to be known and can drive the object toward desired shapes through large deformations. The inputs to our approach are the point cloud of the object's surface in its rest shape and the point cloud captured by a 3D camera in each frame. Overall, our approach is more broadly applicable than existing approaches. We validate the efficiency of our approach through numerous experiments with deformable objects of various shapes and materials (paper, rubber, plastic, foam). Experiment videos are available on the project website: https://sites.google.com/view/tracking-servoing-approach.