 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRL-Based Pose Control for Double-Ackermann Robots Under Actuation Uncertainties
May 29, 2026Robust deployment of deep reinforcement learning (DRL) policies on real robots remains challenging due to discrepancies between simulation and real-world dynamics. We address this issue in the context of maneuvering with double-Ackermann-steering mobile robots, which introduce additional constraints due to their non-holonomic nature. Building upon the DRL framework ManeuverNet, we extend its objective from position control to full pose control, resulting in a more challenging task. We further investigate the impact of actuation-related uncertainties on policy transfer. The use of simplified actuation models during training of the extended policy can lead to poor generalization, shown by a success rate drop from 100% in PyBullet to 25% in Gazebo under stricter evaluation conditions. To address this limitation, we adopt a sim-to-sim-to-real approach, where actuation effects observed in Gazebo are incorporated into the PyBullet training environment. Using multi-environment DRL with SAC and CrossQ, we learn policies that remain robust despite modeling inaccuracies. This approach can significantly reduce the performance gap across simulators, achieving up to 92% success rate in Gazebo and maintaining 69% under stricter thresholds, with successful transfer to a real robot without additional tuning.
ManeuverNet: A Soft Actor-Critic Framework for Precise Maneuvering of Double-Ackermann-Steering Robots with Optimized Reward Functions
Feb 16, 2026Autonomous control of double-Ackermann-steering robots is essential in agricultural applications, where robots must execute precise and complex maneuvers within a limited space. Classical methods, such as the Timed Elastic Band (TEB) planner, can address this problem, but they rely on parameter tuning, making them highly sensitive to changes in robot configuration or environment and impractical to deploy without constant recalibration. At the same time, end-to-end deep reinforcement learning (DRL) methods often fail due to unsuitable reward functions for non-holonomic constraints, resulting in sub-optimal policies and poor generalization. To address these challenges, this paper presents ManeuverNet, a DRL framework tailored for double-Ackermann systems, combining Soft Actor-Critic with CrossQ. Furthermore, ManeuverNet introduces four specifically designed reward functions to support maneuver learning. Unlike prior work, ManeuverNet does not depend on expert data or handcrafted guidance. We extensively evaluate ManeuverNet against both state-of-the-art DRL baselines and the TEB planner. Experimental results demonstrate that our framework substantially improves maneuverability and success rates, achieving more than a 40% gain over DRL baselines. Moreover, ManeuverNet effectively mitigates the strong parameter sensitivity observed in the TEB planner. In real-world trials, ManeuverNet achieved up to a 90% increase in maneuvering trajectory efficiency, highlighting its robustness and practical applicability.
Scale-free vision-based aerial control of a ground formation with hybrid topology
Jan 24, 2024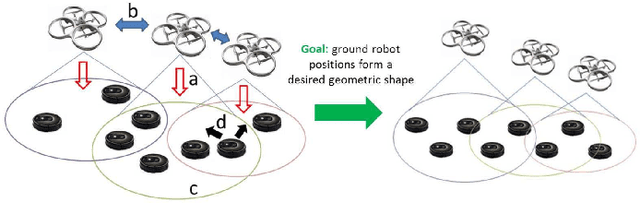



We present a novel vision-based control method to make a group of ground mobile robots achieve a specified formation shape with unspecified size. Our approach uses multiple aerial control units equipped with downward-facing cameras, each observing a partial subset of the multirobot team. The units compute the control commands from the ground robots' image projections, using neither calibration nor scene scale information, and transmit them to the robots. The control strategy relies on the calculation of image similarity transformations, and we show it to be asymptotically stable if the overlaps between the subsets of controlled robots satisfy certain conditions. The presence of the supervisory units, which coordinate their motions to guarantee a correct control performance, gives rise to a hybrid system topology. All in all, the proposed system provides relevant practical advantages in simplicity and flexibility. Within the problem of controlling a team shape, our contribution lies in addressing several simultaneous challenges: the controller needs only partial information of the robotic group, does not use distance measurements or global reference frames, is designed for unicycle agents, and can accommodate topology changes. We present illustrative simulation results.
* This is the accepted version an already published manuscript. See journal reference for details
Robotic Control of the Deformation of Soft Linear Objects Using Deep Reinforcement Learning
Dec 08, 2023



This paper proposes a new control framework for manipulating soft objects. A Deep Reinforcement Learning (DRL) approach is used to make the shape of a deformable object reach a set of desired points by controlling a robotic arm which manipulates it. Our framework is more easily generalizable than existing ones: it can work directly with different initial and desired final shapes without need for relearning. We achieve this by using learning parallelization, i.e., executing multiple agents in parallel on various environment instances. We focus our study on deformable linear objects. These objects are interesting in industrial and agricultural domains, yet their manipulation with robots, especially in 3D workspaces, remains challenging. We simulate the entire environment, i.e., the soft object and the robot, for the training and the testing using PyBullet and OpenAI Gym. We use a combination of state-of-the-art DRL techniques, the main ingredient being a training approach for the learning agent (i.e., the robot) based on Deep Deterministic Policy Gradient (DDPG). Our simulation results support the usefulness and enhanced generality of the proposed approach.
Multi Actor-Critic DDPG for Robot Action Space Decomposition: A Framework to Control Large 3D Deformation of Soft Linear Objects
Dec 08, 2023



Robotic manipulation of deformable linear objects (DLOs) has great potential for applications in diverse fields such as agriculture or industry. However, a major challenge lies in acquiring accurate deformation models that describe the relationship between robot motion and DLO deformations. Such models are difficult to calculate analytically and vary among DLOs. Consequently, manipulating DLOs poses significant challenges, particularly in achieving large deformations that require highly accurate global models. To address these challenges, this paper presents MultiAC6: a new multi Actor-Critic framework for robot action space decomposition to control large 3D deformations of DLOs. In our approach, two deep reinforcement learning (DRL) agents orient and position a robot gripper to deform a DLO into the desired shape. Unlike previous DRL-based studies, MultiAC6 is able to solve the sim-to-real gap, achieving large 3D deformations up to 40 cm in real-world settings. Experimental results also show that MultiAC6 has a 66\% higher success rate than a single-agent approach. Further experimental studies demonstrate that MultiAC6 generalizes well, without retraining, to DLOs with different lengths or materials.
ROBUSfT: Robust Real-Time Shape-from-Template, a C++ Library
Jan 10, 2023



Tracking the 3D shape of a deforming object using only monocular 2D vision is a challenging problem. This is because one should (i) infer the 3D shape from a 2D image, which is a severely underconstrained problem, and (ii) implement the whole solution pipeline in real-time. The pipeline typically requires feature detection and matching, mismatch filtering, 3D shape inference and feature tracking algorithms. We propose ROBUSfT, a conventional pipeline based on a template containing the object's rest shape, texturemap and deformation law. ROBUSfT is ready-to-use, wide-baseline, capable of handling large deformations, fast up to 30 fps, free of training, and robust against partial occlusions and discontinuity in video frames. It outperforms the state-of-the-art methods in challenging datasets. ROBUSfT is implemented as a publicly available C++ library and we provide a tutorial on how to use it in https://github.com/mrshetab/ROBUSfT
Lattice-based shape tracking and servoing of elastic objects
Sep 07, 2022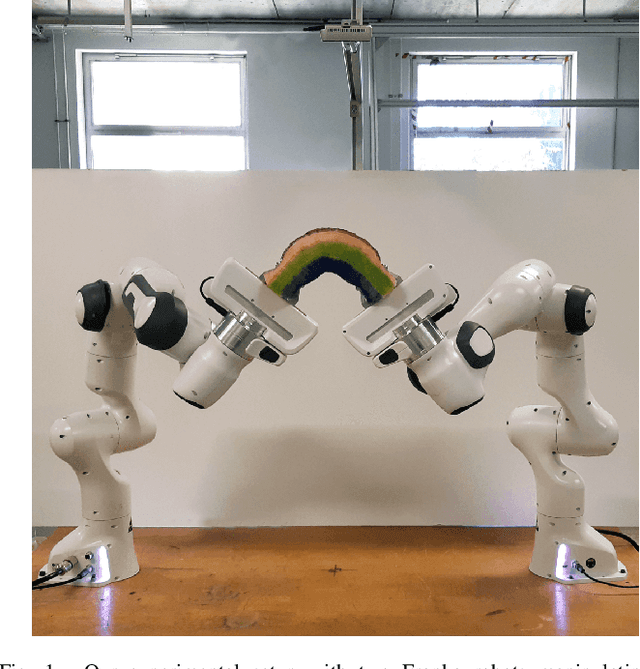
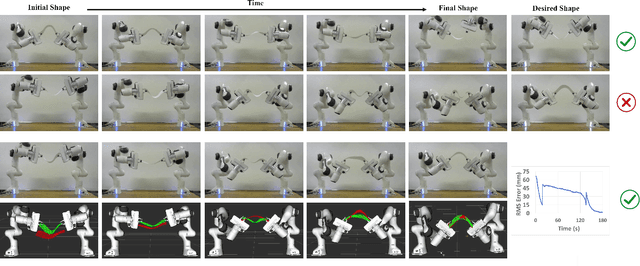
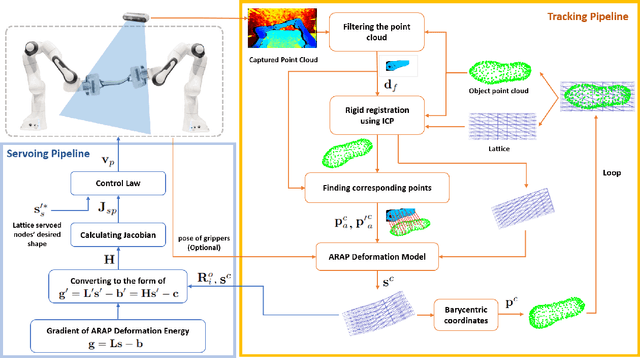

In this paper, we propose a general unified tracking-servoing approach for controlling the shape of elastic deformable objects using robotic arms. Our approach works by forming a lattice around the object, binding the object to the lattice, and tracking and servoing the lattice instead of the object. This makes our approach have full 3D control over deformable objects of any general form (linear, thin-shell, volumetric). Furthermore, it decouples the runtime complexity of the approach from the objects' geometric complexity. Our approach is based on the As-Rigid-As-Possible (ARAP) deformation model. It requires no mechanical parameter of the object to be known and can drive the object toward desired shapes through large deformations. The inputs to our approach are the point cloud of the object's surface in its rest shape and the point cloud captured by a 3D camera in each frame. Overall, our approach is more broadly applicable than existing approaches. We validate the efficiency of our approach through numerous experiments with deformable objects of various shapes and materials (paper, rubber, plastic, foam). Experiment videos are available on the project website: https://sites.google.com/view/tracking-servoing-approach.