 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAVOCADO: Adaptive Optimal Collision Avoidance driven by Opinion
Jun 29, 2024



We present AVOCADO (AdaptiVe Optimal Collision Avoidance Driven by Opinion), a novel navigation approach to address holonomic robot collision avoidance when the degree of cooperation of the other agents in the environment is unknown. AVOCADO departs from a Velocity Obstacle's formulation akin to the Optimal Reciprocal Collision Avoidance method. However, instead of assuming reciprocity, AVOCADO poses an adaptive control problem that aims at adapting in real-time to the cooperation degree of other robots and agents. Adaptation is achieved through a novel nonlinear opinion dynamics design that relies solely on sensor observations. As a by-product, based on the nonlinear opinion dynamics, we propose a novel method to avoid the deadlocks under geometrical symmetries among robots and agents. Extensive numerical simulations show that AVOCADO surpasses existing geometrical, learning and planning-based approaches in mixed cooperative/non-cooperative navigation environments in terms of success rate, time to goal and computational time. In addition, we conduct multiple real experiments that verify that AVOCADO is able to avoid collisions in environments crowded with other robots and humans.
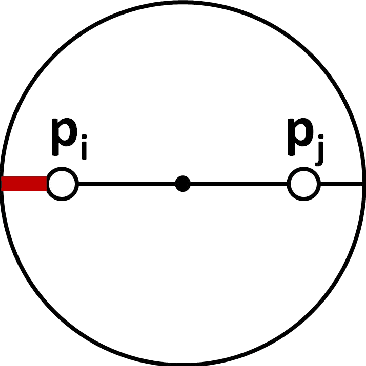
Equitable Persistent Coverage of Non-Convex Environments with Graph-Based Planning
Jan 24, 2024In this paper we tackle the problem of persistently covering a complex non-convex environment with a team of robots. We consider scenarios where the coverage quality of the environment deteriorates with time, requiring to constantly revisit every point. As a first step, our solution finds a partition of the environment where the amount of work for each robot, weighted by the importance of each point, is equal. This is achieved using a power diagram and finding an equitable partition through a provably correct distributed control law on the power weights. Compared to other existing partitioning methods, our solution considers a continuous environment formulation with non-convex obstacles. In the second step, each robot computes a graph that gathers sweep-like paths and covers its entire partition. At each planning time, the coverage error at the graph vertices is assigned as weights of the corresponding edges. Then, our solution is capable of efficiently finding the optimal open coverage path through the graph with respect to the coverage error per distance traversed. Simulation and experimental results are presented to support our proposal.
* This is the accepted version an already published manuscript. See journal reference for details
Latency vs precision: Stability preserving perception scheduling
Jan 24, 2024In robotic systems, perception latency is a term that refers to the computing time measured from the data acquisition to the moment in which perception output is ready to be used to compute control commands. There is a compromise between perception latency, precision for the overall robotic system, and computational resource usage referred to here as the latency-precision trade-off. In this work, we analyze a robot model given by a linear system, a zero-order hold controller, and measurements taken by several perception mode possibilities with different noise levels. We show that the analysis of this system is reduced to studying an equivalent switching system. Our goal is to schedule perception modes such that stability is attained while optimizing a cost function that models the latency-precision trade-off. Our solution framework comprises three main tools: the construction of perception scheduling policy candidates, admissibility verification for policy candidates, and optimal strategies based on admissible policies.
* This is the accepted version of an already published manuscript. See journal reference
Scale-free vision-based aerial control of a ground formation with hybrid topology
Jan 24, 2024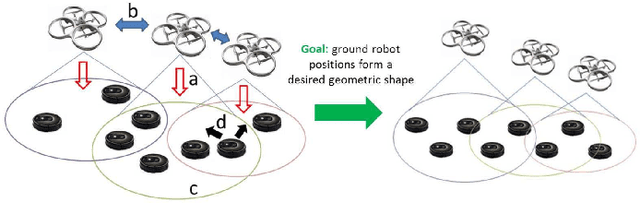



We present a novel vision-based control method to make a group of ground mobile robots achieve a specified formation shape with unspecified size. Our approach uses multiple aerial control units equipped with downward-facing cameras, each observing a partial subset of the multirobot team. The units compute the control commands from the ground robots' image projections, using neither calibration nor scene scale information, and transmit them to the robots. The control strategy relies on the calculation of image similarity transformations, and we show it to be asymptotically stable if the overlaps between the subsets of controlled robots satisfy certain conditions. The presence of the supervisory units, which coordinate their motions to guarantee a correct control performance, gives rise to a hybrid system topology. All in all, the proposed system provides relevant practical advantages in simplicity and flexibility. Within the problem of controlling a team shape, our contribution lies in addressing several simultaneous challenges: the controller needs only partial information of the robotic group, does not use distance measurements or global reference frames, is designed for unicycle agents, and can accommodate topology changes. We present illustrative simulation results.
* This is the accepted version an already published manuscript. See journal reference for details
Cooperative Periodic Coverage With Collision Avoidance
Jan 24, 2024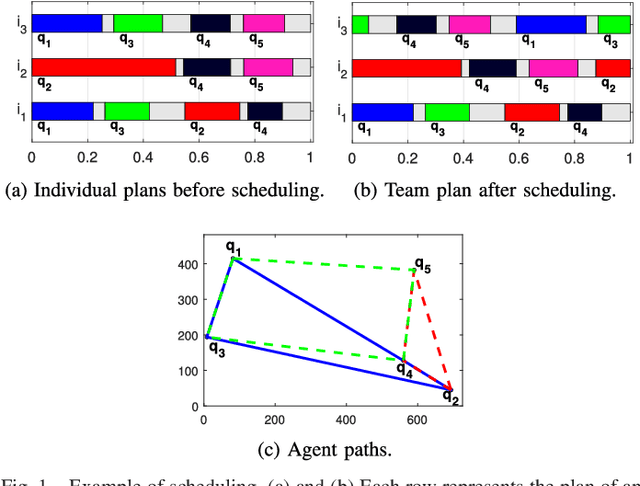



In this paper we propose a periodic solution to the problem of persistently covering a finite set of interest points with a group of autonomous mobile agents. These agents visit periodically the points and spend some time carrying out the coverage task, which we call coverage time. Since this periodic persistent coverage problem is NP-hard, we split it into three subproblems to counteract its complexity. In the first place, we plan individual closed paths for the agents to cover all the points. Second, we formulate a quadratically constrained linear program to find the optimal coverage times and actions that satisfy the coverage objective. Finally, we join together the individual plans of the agents in a periodic team plan by obtaining a schedule that guarantees collision avoidance. To this end, we solve a mixed integer linear program that minimizes the time in which two or more agents move at the same time. Eventually, we apply the proposed solution to an induction hob with mobile inductors for a domestic heating application and show its performance with experiments on a real prototype.
* This is the accepted version an already published manuscript. See journal reference for details
PLATE: A perception-latency aware estimator,
Jan 24, 2024



Target tracking is a popular problem with many potential applications. There has been a lot of effort on improving the quality of the detection of targets using cameras through different techniques. In general, with higher computational effort applied, i.e., a longer perception-latency, a better detection accuracy is obtained. However, it is not always useful to apply the longest perception-latency allowed, particularly when the environment doesn't require to and when the computational resources are shared between other tasks. In this work, we propose a new Perception-LATency aware Estimator (PLATE), which uses different perception configurations in different moments of time in order to optimize a certain performance measure. This measure takes into account a perception-latency and accuracy trade-off aiming for a good compromise between quality and resource usage. Compared to other heuristic frame-skipping techniques, PLATE comes with a formal complexity and optimality analysis. The advantages of PLATE are verified by several experiments including an evaluation over a standard benchmark with real data and using state of the art deep learning object detection methods for the perception stage.
* This is the accepted version an already published manuscript. See journal reference for details
Simultaneous Deployment and Tracking Multi-Robot Strategies with Connectivity Maintenance
Mar 19, 2018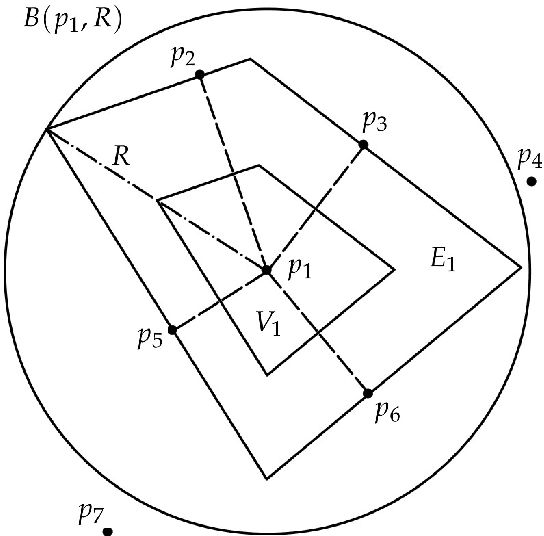
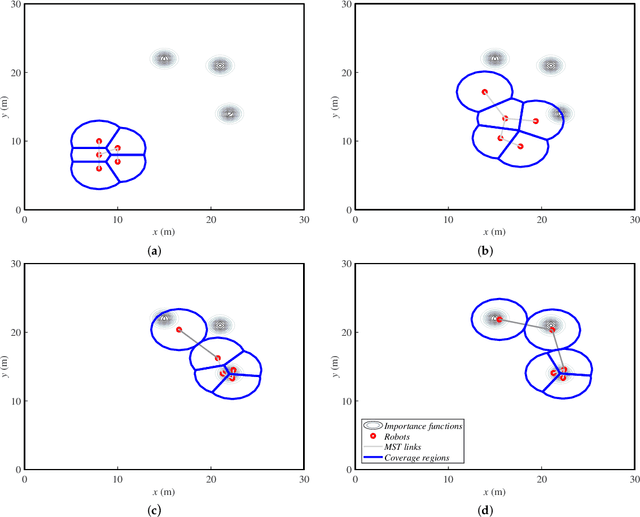
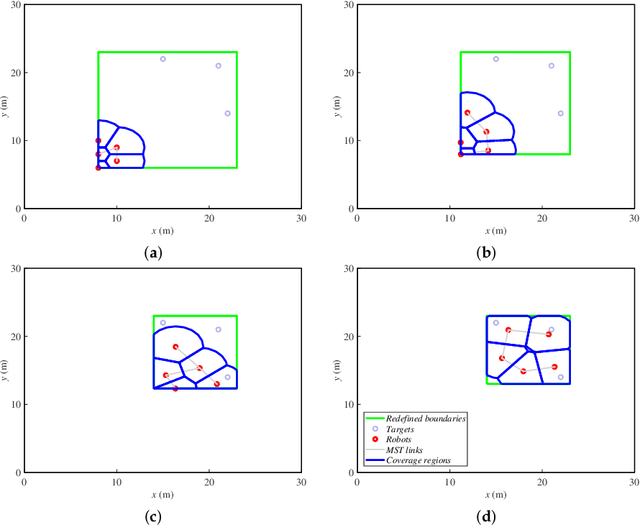
Multi robot teams composed by ground and aerial vehicles have gained attention during the last years. We present a scenario where both types of robots must monitor the same area from different view points. In this paper we propose two Lloyd-based tracking strategies to allow the ground robots (agents) follow the aerial ones (targets), keeping the connectivity between the agents. The first strategy establishes density functions on the environment so that the targets acquire more importance than other zones, while the second one iteratively modifies the virtual limits of the working area depending on the positions of the targets. We consider the connectivity maintenance due to the fact that coverage tasks tend to spread the agents as much as possible, which is addressed by restricting their motions so that they keep the links of a Minimum Spanning Tree of the communication graph. We provide a thorough parametric study of the performance of the proposed strategies under several simulated scenarios. In addition, the methods are implemented and tested using realistic robotic simulation environments and real experiments.